Caja de engranajes planetarios de precisión con brida cuadrada y entrada en ángulo recto de la serie EP-ZDWF

La serie EP-ZDWF es una caja de engranajes planetarios de precisión con brida cuadrada y entrada en ángulo recto que combina una etapa de entrada cónica de 90° con una brida de montaje de salida cuadrada, disponible en cuatro tamaños de bastidor desde EP-ZDWF-60 hasta EP-ZDWF-160. Ofrece un par de salida nominal de 12 N·m a 800 N·m con una eficiencia de una sola etapa de 94%. La entrada cónica de 90° posiciona el servomotor perpendicular al eje de salida, reduciendo la profundidad total de instalación axial entre 30 y 50% en comparación con la instalación en línea. La brida cuadrada (□60–□175 mm) se atornilla a cualquier placa plana con 4 pernos pasantes, sin necesidad de perforación de precisión. EP-ZDWF es la caja de engranajes de ángulo recto más versátil en cuanto a instalación. reductor de engranajes planetarios de precisión En la serie Ever-Power EP de Corea, se combinan en una sola unidad los ahorros en profundidad axial y mecanizado de orificios.
Serie EP-ZDWF — Reductor planetario de precisión con brida cuadrada y entrada en ángulo recto | Ahorro axial 30–50% + Sin orificio, hasta 800 N·m
EP-ZDWF es la caja de engranajes planetarios de precisión de Korea Ever-Power que combina dos ventajas de instalación simultáneamente: Reducción de profundidad axial 30–50% de la entrada de bisel de ángulo recto (desde el Caja de engranajes planetarios de ángulo recto serie EP-ZDWE) y el Montaje en placa plana sin necesidad de perforación de la brida de salida cuadrada (desde el Serie EP-ZDFPara los fabricantes de maquinaria coreanos que trabajan con bastidores soldados, estructuras de extrusión de aluminio o conjuntos de placas cortadas con láser, donde tanto el espacio axial como la capacidad de mecanizado de orificios son limitados, EP-ZDWF elimina ambas restricciones en un solo producto.
El Reductor de engranajes planetario de precisión con brida cuadrada y ángulo recto de la serie EP-ZDWF Ever-Power, de Corea, es la combinación de las series EP-ZDWE y EP-ZDF en una sola unidad. Incorpora la etapa de entrada cónica de 90° en ángulo recto de la EP-ZDWE, que posiciona el servomotor perpendicular al eje de salida para reducir la profundidad axial total, y reemplaza la carcasa de salida redonda de la EP-ZDWE con la brida de salida cuadrada (□60–□175 mm) de la EP-ZDF, lo que permite un montaje directo con pernos de placa plana sin necesidad de un orificio de precisión. Todas las etapas de engranajes internos, los valores de par, las especificaciones de juego, los valores de eficiencia y las características de lubricación de por vida son idénticos a los de la EP-ZDWE.
Los fabricantes de maquinaria OEM coreanos que diseñan máquinas en torno a chasis de chapa plana cortados con láser o bastidores de sección rectangular soldados —algo común en los fabricantes coreanos de AGV, los constructores de bastidores para robots colaborativos y los integradores de sistemas de transporte compactos— consideran que el EP-ZDWF es la especificación óptima cuando las especificaciones de diseño limitan simultáneamente tanto la profundidad axial disponible detrás del eje de accionamiento como las operaciones de mecanizado disponibles para el mandrinado.
La ventaja de la doble instalación: por qué EP-ZDWF combina ambos ahorros.

ORIFICIO DE DIÁMETRO REDONDO EN LÍNEA (EP-ZDE) — DOS RESTRICCIONES
Problema 1: Profundidad axial larga
Problema 2: Se necesita un orificio de precisión
→ Se requiere operación de mecanizado
→ Motor + caja de engranajes ~264 mm de profundidad
ORIFICIO DE DIÁMETRO REDONDO EN ÁNGULO RECTO (EP-ZDWE) — UNA RESTRICCIÓN
[=ZDWE=]──▶ Salida de orificio redondo
✔ Profundidad axial corta (resuelto)
✘ Todavía necesita un orificio de precisión
BRIDA CUADRADA EN ÁNGULO RECTO (EP-ZDWF) ★ — SIN RESTRICCIONES
[=ZDWF=]──▶ □ Placa plana, 4 pernos
✔ Profundidad axial corta (resuelto)
✔ No se requiere aburrimiento (resuelto)
→ Taladre 4 agujeros, coloque el perno, listo.
Cuando se aplican ambas restricciones, EP-ZDWF es la especificación correcta.
① Máquinas compactas con bastidor soldado: sin mandrinar, sin espacio axial.
Los fabricantes coreanos de maquinaria compacta especializada que construyen bastidores con perfiles de acero estructural soldados se enfrentan a dos limitaciones simultáneamente: el bastidor soldado carece de orificios mecanizados y la profundidad tras el eje para la instalación del motor es limitada. Una placa cortada con láser y soldada al bastidor proporciona una superficie de montaje plana que admite la brida cuadrada del EP-ZDWF con cuatro orificios roscados; la entrada biselada en ángulo recto sitúa el motor dentro de la profundidad disponible del bastidor, en lugar de sobresalir. El EP-ZDWF resuelve la instalación del bastidor soldado sin necesidad de mecanizado posterior a la soldadura ni de extender el volumen de la máquina más allá de los límites del bastidor.
② Chasis de placa plana para AGV y robots móviles: estructura cortada con láser, profundidad mínima
Los fabricantes coreanos de AGV suelen construir bastidores de módulos de accionamiento a partir de placas planas de aluminio o acero cortadas con láser y ensambladas en una estructura de caja. El eje de accionamiento se monta a través de una placa, y la altura disponible del chasis (a menudo de 100 a 140 mm para AGV de perfil bajo) hace imposible un motor en línea con un nivel de par útil. El EP-ZDWF-60 o EP-ZDWF-80 se monta a través de la placa inferior con la brida cuadrada atornillada a la cara de la placa: 4 orificios cortados con láser en la placa, cortados simultáneamente con el perfil de la placa. El motor sale hacia arriba, al interior del chasis. La profundidad total del accionamiento es solo la caja de engranajes L1 (150-184,5 mm para bastidores 60-80, de 1 etapa), que se ajusta a la altura del chasis con espacio libre para la altura del cuerpo del motor dentro del volumen interno del chasis.
③ Máquinas para perfiles de extrusión de aluminio: montaje directo sin soportes
Los fabricantes coreanos de sistemas de automatización que utilizan perfiles de aluminio de 80 × 80 mm o 120 × 120 mm para máquinas de recogida y colocación, dispensación y ensamblaje, emplean el EP-ZDWF montando la brida cuadrada directamente en una placa de extremo o soporte de refuerzo del perfil. El perfil con ranura en T no permite un orificio de precisión, pero una placa plana fijada al perfil admite la brida cuadrada atornillada de cara plana del EP-ZDWF. La entrada en ángulo recto permite que el motor salga a lo largo del eje del perfil en lugar de perpendicularmente a él, manteniendo la sección transversal total de la máquina dentro de la cuadrícula del perfil sin necesidad de una extrusión sobredimensionada a medida ni un voladizo del motor.
Las cuatro variantes de la serie EP: comparación completa de la instalación
| Criterio | EP-ZDE | EP-ZDF | EP-ZDWE | EP-ZDWF ★ |
|---|---|---|---|---|
| Orientación motora | En línea | En línea | ángulo recto de 90° | ángulo recto de 90° |
| Brida de salida | Redondo Φ (montaje en el orificio) | Cuadrado □ (montaje de placa) | Redondo Φ (montaje en el orificio) | Cuadrado □ (montaje de placa) |
| Ahorro de profundidad axial | — | — | ✔ 30–50% más corto | ✔ 30–50% más corto |
| No se necesita aburrimiento | — | ✔ Sin aburrimiento | — | ✔ Sin aburrimiento |
| Eficiencia de 1 etapa | 96% | 96% | 94% | 94% |
| Par / Juego / IP | Idénticos dentro de cada tamaño de bastidor: mismo par nominal, misma holgura por etapa, IP54, lubricación de por vida, de −25 °C a +90 °C. | |||
Serie EP-ZDWF: Especificaciones técnicas completas
① Par de salida nominal (N·m) — Todos los tamaños y relaciones de bastidor
| Relación | Escenario | ZDWF-60 | ZDWF-80 | ZDWF-120 | ZDWF-160 |
|---|---|---|---|---|---|
| 3:1 | 1 | 12 | 40 | 80 | 400 |
| 4:1 | 1 | 16 | 50 | 110 | 450 |
| 5:1 | 1 | 16 | 50 | 110 | 450 |
| 8:1 | 1 | 15 | 45 | 100 | 400 |
| 10:1 | 1 | 12 | 40 | 80 | 305 |
| 9:1 | 2 | 40 | 100 | 210 | — |
| 12:1 | 2 | 40 | 100 | 210 | 700 |
| 16:1 | 2 | 44 | 120 | 260 | 800 |
| 20:1 | 2 | 44 | 120 | 260 | 800 |
| 25:1 | 2 | 40 | 110 | 230 | 700 |
| 32:1 | 2 | 44 | 120 | 260 | 800 |
| 40:1 | 2 | 40 | 110 | 230 | 700 |
| 64:1 | 2 | 40 | 100 | 210 | 700 |
| 60–512:1 | 3 | 40–44 | 100–120 | 210–260 | — |
② Capacidad de carga, eficiencia, peso y velocidad: idénticos a los de EP-ZDWE.
| Parámetro | Unidad | ZDWF-60 | ZDWF-80 | ZDWF-120 | ZDWF-160 |
|---|---|---|---|---|---|
| Fuerza radial máxima | norte | 450 | 900 | 2,100 | 6,000 |
| Fuerza axial máxima | norte | 225 | 450 | 1,050 | 3,000 |
| Eficiencia: 1 etapa | % | 94 (etapa de entrada biselada; frente al 96% para EP-ZDE/ZDF en línea) | |||
| Eficiencia: 2 etapas | % | 92 | |||
| Eficiencia: 3 etapas | % | 88 | |||
| Peso — 1 etapa | kilogramo | 1.7 | 4.4 | 12 | 36 |
| Peso: 2 etapas | kilogramo | 1.9 | 5 | 14 | 40 |
| Peso: 3 etapas | kilogramo | 2.1 | 5.5 | 16 | — |
| Rigidez torsional: 1 etapa | N·m/arcmin | 1.5 | 4.5 | 10 | 38 |
| Rigidez torsional: 2 etapas | N·m/arcmin | 2.5 | 6.5 | 13 | 43 |
| Ruido (ralentí, 3000 rpm) | dB(A) | 65 | 68 | 70 | 70 |
| Velocidad máxima de entrada | rpm | 4,500 | |||
| Velocidad de entrada recomendada | rpm | 3,000 | |||
③ Reacción negativa de Frame & Stage
| Escenario | Unidad | ZDWF-60 | ZDWF-80 | ZDWF-120 | ZDWF-160 |
|---|---|---|---|---|---|
| Reacción adversa — 1 etapa | minutos de arco | <30 | <25 | <25 | <25 |
| Reacción adversa — 2 etapas | minutos de arco | <35 | <30 | <30 | <30 |
| Reacción adversa — 3 etapas | minutos de arco | <40 | <35 | <35 | — |
④ Especificaciones generales
| Parámetro | Especificación |
|---|---|
| Temperatura de funcionamiento | De -25 °C a +90 °C |
| Índice de protección | IP54 (IEC 60529): hermético al polvo y protegido contra salpicaduras desde cualquier dirección. |
| Lubricación | Lubricación de por vida: sellado de fábrica, cubre tanto las etapas cónicas como las planetarias. |
| Orientación de montaje | Cualquiera: horizontal, vertical, invertido, cualquier ángulo inclinado |
| Dirección de entrada del motor | 4 posiciones: izquierda, derecha, arriba, abajo (especificar al realizar el pedido, fijo de fábrica). |
| Tipos de sujeción del eje de entrada | S: bloqueo integral (predeterminado) · S1: anillo de bloqueo · S2: ranura para llave + sujeción · K: ranura para llave · A: personalizado |
| Tolerancia del eje de salida | h7 — todos los tamaños de marco |
| Vida útil nominal | 20.000 horas a carga nominal (vida útil del rodamiento L10) |
| Par de parada instantáneo | 2 veces el par de salida nominal |
Serie EP-ZDWF — Dimensiones mecánicas (Unidad: mm)
El EP-ZDWF comparte todas las dimensiones del cuerpo y de entrada con el EP-ZDWE. Las filas naranjas muestran las dimensiones de salida de la brida cuadrada específicas del ZDWF. L1 y L12 son iguales a las del EP-ZDWE para el tamaño de bastidor correspondiente.
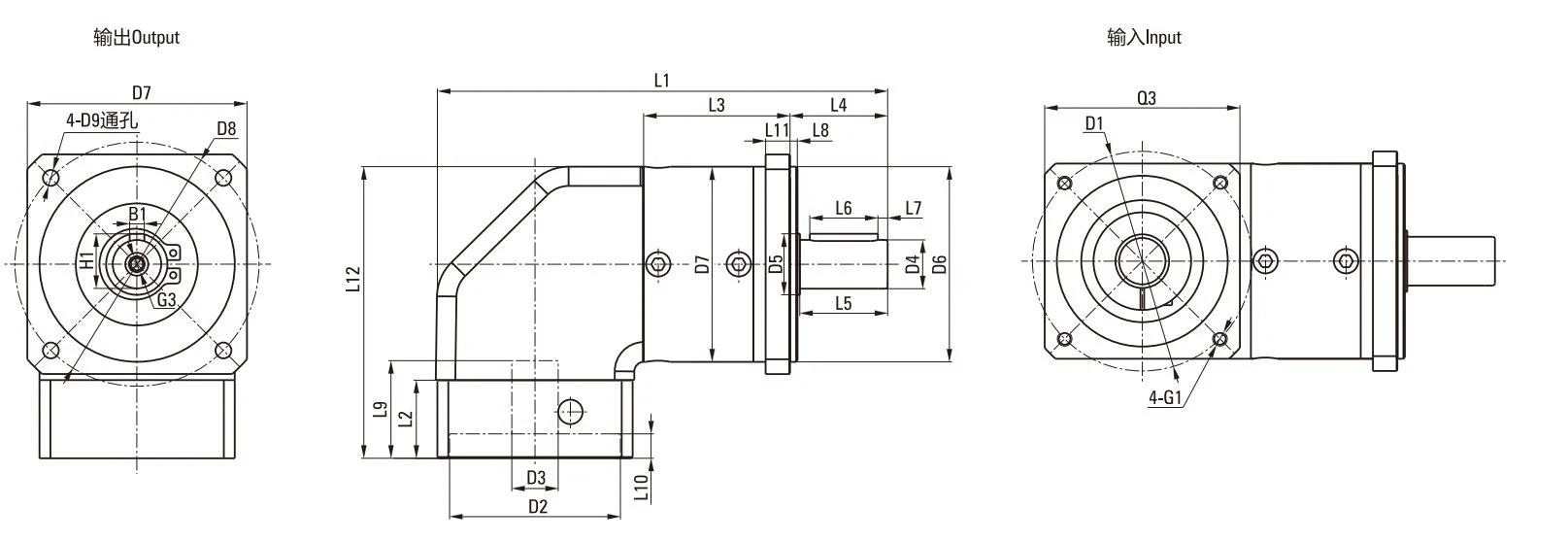
| Dimensión | 60ZDWF | 80ZDWF | 120ZDWF | 160ZDWF |
|---|---|---|---|---|
| Tamaño de brida cuadrada D7 | □60 | □90 | □120 | □160 / □175 |
| Espesor de la brida L11 | 8 | 10 | 15 | 5 |
| Longitud total L1 — 1 etapa | 150 | 184.5 | 249.2 | 368 |
| Longitud total L1 — 2 etapas | 163 | 202.5 | 277 | 417.5 |
| Altura total L12 (incluida la brida de entrada) | 93 | 119.5 | 167.5 | 229 |
| Diámetro del eje de salida D4 | Φ14h7 | Φ20h7 | Φ25h7 | Φ40h7 |
| Longitud de la brida de entrada L2 | 20 | 32 | 38 | 66 |
| Brida de entrada Q3 (cuadrada) | □60 | □80 | □130 | □175 |
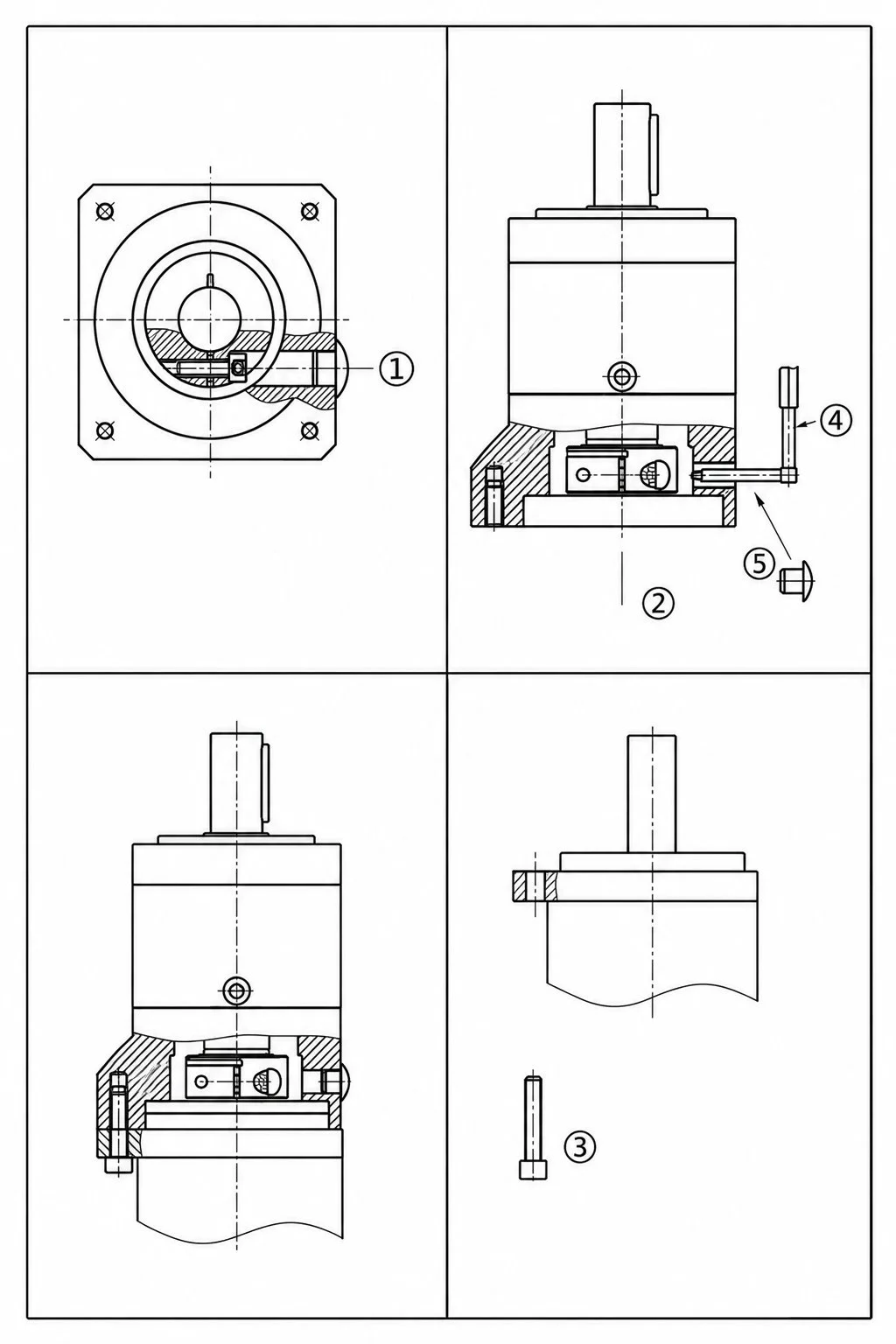
Guía de instalación — Serie EP-ZDWF de brida cuadrada en ángulo recto
Montaje combinado de ángulo recto y brida cuadrada: cualquier superficie plana, cualquier orientación.
La instalación del EP-ZDWF combina los procedimientos del EP-ZDWF y el EP-ZDF: la brida cuadrada se atornilla a cualquier superficie plana de la máquina (sin necesidad de taladrar) y el motor se monta perpendicularmente mediante la etapa de entrada biselada. Especifique la dirección de entrada del motor (izquierda/derecha/arriba/abajo) al realizar el pedido; esta se fija en la fábrica.
Procedimiento de instalación paso a paso
Confirme la dirección de entrada, el tamaño de la brida y el código del modelo.
Verifique que el código del modelo EP-ZDWF incluya la dirección de entrada del motor (izquierda/derecha/arriba/abajo), el tamaño del bastidor (60–160), el tamaño de la brida cuadrada D7 (□60–□175) y la brida de entrada Q3 que coincida con la cara frontal del servomotor. Confirme que L12 (altura total con la entrada del motor) se ajuste a la sección de su máquina. Compruebe que el tamaño de la brida cuadrada y el patrón de orificios para pernos sean compatibles con la placa de su máquina antes de la instalación.
Prepare la placa de la máquina: solo 4 agujeros.
Taladre cuatro orificios de montaje en la placa de la máquina con la distancia de paso de pernos (PCD) correcta (consulte la tabla de dimensiones EP-ZDF para el tamaño de bastidor correspondiente: valores D8 y D9). No se requiere un taladrado de precisión. Asegúrese de que la planitud de la superficie de montaje sea inferior a 0,02 mm. Para placas cortadas con láser, confirme que las posiciones de los orificios para los pernos estén incluidas en el archivo de corte durante la fase de diseño de la placa; no se requiere mecanizado adicional. Limpie la superficie para eliminar las rebabas antes del montaje.
Acoplamiento del motor — Entrada de bisel perpendicular
Inserte completamente el eje del servomotor en el orificio de entrada biselado perpendicular hasta que la cara del motor haga contacto perpendicularmente con la brida de entrada. Apriete los tornillos de bloqueo tipo S de manera uniforme, formando una cruz. Verifique que no haya espacio axial entre la cara del motor y la brida de entrada; si el eje del motor es más corto que la profundidad del orificio, utilice un anillo espaciador. La entrada de sujeción funciona con o sin chavetero en el eje del motor.
Montaje con brida cuadrada — Patrón de 4 pernos
Coloque la cara de la brida cuadrada contra la placa de la máquina, alineando los 4 orificios pasantes con el patrón de orificios de la placa. Inserte pernos de clase 8.8 (se recomienda 10.9 para aplicaciones de alto ciclo), apriételos a mano, verifique que la cara esté completamente en contacto y luego aplique el par de apriete uniformemente en forma de cruz. Utilice compuesto fijador de roscas (de resistencia media) para aplicaciones con alta vibración. Verifique que el cuerpo del motor tenga espacio libre en la dirección perpendicular antes del apriete final.
Eje de salida, comprobación de carga y holgura
Conecte el acoplamiento de carga al eje de salida h7 D4 siguiendo el procedimiento estándar. Confirme que la carga radial en el centro del eje (L/2) no supere la fuerza radial máxima (p. ej., 900 N para el bastidor 80). Gire manualmente el motor en una revolución completa y confirme que el cuerpo del motor no interfiera con la estructura de la máquina en la dirección perpendicular. Coloque los cables del servomotor en paralelo al eje de desplazamiento de la máquina, utilizando una cadena portacables con la longitud de bucle adecuada para acomodar cualquier rango de movimiento del eje sin tensión en el cable.
Puesta en marcha sin carga, reapriete de pernos y calentamiento del bisel.
Haga funcionar sin carga durante 30 minutos a una velocidad de entrada nominal ≤50%. Después del rodaje: (1) vuelva a comprobar los valores de par de apriete de los 4 pernos de la brida; el ciclo térmico puede provocar un ligero asentamiento de la junta; (2) un ligero zumbido en la etapa de bisel durante los primeros 10-15 minutos es un comportamiento normal durante el rodaje; (3) verifique el juego del sistema mediante la retroalimentación del servomotor. Registre este resultado como línea base de instalación. La lubricación sellada de por vida no requiere mantenimiento adicional después de este procedimiento de rodaje.
⚠ Precauciones de instalación: La dirección de entrada del motor viene predefinida de fábrica; especifíquela correctamente al realizar el pedido. La cara de la brida cuadrada debe tener contacto total con la placa de la máquina; cualquier espacio libre concentra la carga del perno y aumenta el riesgo de fatiga de la brida. No aplique fuerza axial al eje de entrada cónico durante la instalación del motor. Nunca supere las 4500 rpm de velocidad de entrada. La carcasa sellada no tiene orificio de engrase; no añada lubricante externamente.
✔ Mantenimiento cero: ambas etapas cubiertas: La lubricación sellada de fábrica cubre tanto la etapa de entrada cónica como las etapas de engranajes planetarios en una sola carcasa. No requiere aceite específico para engranajes cónicos, lubricación programada ni reengrasado durante su vida útil nominal de 20 000 horas. Vuelva a comprobar los 4 pernos de montaje de la brida en la primera inspección de 5000 horas, junto con la comprobación visual del sello labial; esta es la única acción de mantenimiento periódico para el EP-ZDWF.
Aplicaciones: Reductor planetario de brida cuadrada en ángulo recto EP-ZDWF en diseños de plataformas compactas coreanas
Módulos de accionamiento AGV de perfil bajo: chasis cortado con láser, altura mínima.
Los fabricantes coreanos de AGV que construyen AMR de bajo perfil para almacenes con una altura de chasis de 100–150 mm utilizan EP-ZDWF-60 y EP-ZDWF-80 para la reducción del servomotor de la rueda motriz. La brida cuadrada se atornilla a la placa inferior del chasis a través de 4 orificios cortados con láser (sin necesidad de taladrado ni mecanizado secundario) y el motor sale hacia arriba hacia el interior del chasis a través de la altura disponible de 100–150 mm. La profundidad axial total de la caja de engranajes debajo de la placa del chasis es solo la dimensión L1 (150–184,5 mm para bastidores 60–80, 1 etapa), lo que coloca la rueda motriz a la altura correcta con respecto al suelo. Los fabricantes coreanos de AGV en Hwaseong, Incheon y Ansan informan que EP-ZDWF permite diseños de AMR de bajo perfil que compiten directamente con las unidades de engranajes AGV diseñadas específicamente para este fin, a una fracción del costo de las herramientas personalizadas.
Máquinas compactas de propósito especial con bastidor soldado
Los fabricantes coreanos de maquinaria especializada que fabrican bastidores de acero soldados para equipos de montaje, ensayo o manipulación de materiales utilizan el EP-ZDWF cuando no disponen de espacio axial ni capacidad de mecanizado de orificios. Una placa insertada cortada con láser y soldada al bastidor proporciona la superficie de montaje plana para la brida cuadrada del EP-ZDWF. La entrada biselada en ángulo recto posiciona el motor dentro de la profundidad del bastidor, en lugar de sobresalir de sus límites. Esto es especialmente común en las máquinas de ensamblaje de módulos de baterías para vehículos eléctricos en Corea, donde el espacio que ocupa la máquina está muy limitado por la disposición de la celda de producción y el mecanizado de orificios en conjuntos soldados resulta poco práctico.
Celdas de automatización para perfiles de aluminio: sin mecanizado secundario.
Los integradores de sistemas de automatización coreanos que construyen celdas de ensamblaje y dispensación reconfigurables a partir de perfiles de aluminio de 80×80 o 120×120 mm especifican EP-ZDWF para los ejes de accionamiento servo en la estructura del perfil. La brida cuadrada se atornilla a una placa de extremo o refuerzo fijado al perfil (no es posible perforar el propio perfil) y el motor sale a lo largo del eje de la sección del perfil, manteniendo el conjunto de accionamiento dentro de la cuadrícula del perfil sin soportes sobredimensionados. Para la variante de ángulo recto con brida redonda utilizada con bloques de perfil perforados a medida, consulte la Caja de engranajes planetarios de ángulo recto serie EP-ZDWE.
Muñeca robótica colaborativa: estructura de montaje en placa con brida cuadrada.
Los fabricantes coreanos de robots colaborativos que utilizan conjuntos de placas de fibra de carbono o aluminio cortadas con láser para la estructura del brazo del robot (en lugar de eslabones de brazo fundidos o mecanizados) utilizan EP-ZDWF para las articulaciones de balanceo y cabeceo de la muñeca. La brida cuadrada se atornilla al conjunto de placas sin requerir un orificio de precisión que sería impracticable en estructuras compuestas de placas delgadas. La entrada en ángulo recto dirige el motor en paralelo al eslabón del brazo, controlando el diámetro exterior de la muñeca al tamaño del cuerpo de la caja de engranajes (□60–□90 mm). Para aplicaciones donde la estructura del brazo puede alojar un orificio redondo, el Caja de engranajes planetarios EP-ZDWE con brida redonda proporciona un rendimiento equivalente.
Módulos de soporte para máquinas de embalaje de perfil estrecho
Los fabricantes coreanos de maquinaria de envasado que diseñan estaciones de llenado y sellado servoaccionadas para líneas de envasado de carrusel o transportador de cadena de paso estrecho utilizan los modelos EP-ZDWF-60 y EP-ZDWF-80 para servoaccionadores montados en soporte, donde tanto el espacio del soporte como la profundidad disponible detrás de la placa de montaje son limitados. La brida cuadrada permite reemplazar todo el módulo motor-reductor como un conjunto atornillado en una sola operación de mantenimiento, sin necesidad de desmontar el soporte de la máquina ni realizar ningún procedimiento de alineación de orificios. La entrada de bisel en ángulo recto dirige el motor a lo largo de la estructura de la máquina en lugar de proyectarlo hacia la zona de acceso del operario.
Sistemas de giro para seguidores solares: montaje en placa plana, motor lateral.
Los fabricantes coreanos de seguidores solares que diseñan seguidores de uno y dos ejes con estructuras de montaje de tubo de acero plano o hierro angular para parques solares a gran escala en Corea, Vietnam y el sudeste asiático utilizan los modelos EP-ZDWF-120 y EP-ZDWF-160 para los accionamientos de los ejes de acimut y elevación. La brida cuadrada se atornilla directamente a una placa de montaje plana soldada al conjunto del tubo de torsión del seguidor, sin necesidad de mecanizar la estructura de acero fabricada en campo. La entrada de bisel en ángulo recto dirige el servomotor lateralmente a lo largo del tubo de torsión en lugar de proyectarlo perpendicularmente a la superficie del panel del seguidor, lo que reduce la carga de viento sobre el conjunto de accionamiento y mantiene el motor dentro de la sombra estructural del seguidor. El sellado IP54 y el rango de temperatura de funcionamiento de -25 °C a +90 °C cubren las condiciones de funcionamiento de los seguidores solares en exteriores en Corea durante todo el año.
Certificaciones de calidad y normas de ensayo
- ✔Ángulo recto servocaja de cambios Se verificó la planitud de la etapa de biselado y de la cara de la brida cuadrada por lote de producción.
- ✔Juego medido por unidad a ±3% del par de salida nominal; certificado de medición con cada pedido.
- ✔Prueba de par a plena carga con el par de salida nominal para cada unidad antes del envío.
- ✔Verificación de protección IP54 según IEC 60529 — en cada lote de producción
- ✔Certificado de materiales y plano dimensional incluidos con cada entrega.

¿Por qué los ingenieros coreanos especifican Korea Ever-Power EP-ZDWF?
🔧
Resueltas ambas limitaciones de instalación: una sola especificación.
Cuando el diseño de una máquina coreana se ve limitado simultáneamente por la profundidad axial disponible y la imposibilidad de mecanizar orificios, EP-ZDWF resuelve ambos problemas con una única especificación de producto. No se requiere un diseño de soporte independiente para redirigir el motor, ni una plantilla de mandrinado para el bastidor soldado, ni una división entre dos series de cajas de engranajes en la misma máquina. Una caja de engranajes planetarios Número de pieza, dos problemas de instalación resueltos.
🔲
Brida cuadrada en chapa cortada con láser: cero operaciones secundarias.
Para los fabricantes de maquinaria coreanos que utilizan chasis de chapa plana cortada con láser como estructura principal, el patrón de orificios para pernos EP-ZDWF se puede cortar en la chapa simultáneamente con el perfil de la misma: 4 orificios, sin necesidad de perforación secundaria ni tolerancia de mecanizado. La caja de engranajes se instala mediante perforación y atornillado en la misma chapa plana que conforma la estructura del chasis de la máquina.
📐
30–50% Reducción de profundidad axial: mismo ahorro que EP-ZDWE
El ahorro de espacio axial del EP-ZDWF es idéntico al del EP-ZDWE: la etapa de entrada de bisel en ángulo recto funciona de la misma manera en ambos. Los diseñadores coreanos de AGV y máquinas compactas que eligieron el EP-ZDWF en lugar del EP-ZDWE porque su estructura utiliza placas planas en vez de soportes de orificio, obtienen exactamente la misma reducción de profundidad axial en la instalación final.
🔒
Lubricación de por vida: Biselado + Planetario, una carcasa sellada.
La grasa sellada de fábrica cubre la caja de engranajes EP-ZDWF completa (tanto la etapa de entrada cónica como las etapas de engranajes planetarios) en una sola unidad sellada. No requiere depósito de aceite independiente para los engranajes cónicos, mantenimiento del nivel de aceite ni puerto de acceso para la lubricación. Los fabricantes de maquinaria coreanos que instalan la EP-ZDWF en lugares con acceso restringido para el mantenimiento (dentro del chasis del AGV, dentro de las secciones del bastidor de la cinta transportadora) se benefician del diseño que no requiere mantenimiento durante sus 20 000 horas de vida útil.
🔄
4 direcciones de entrada: enrutamiento óptimo de cables para cualquier diseño de plataforma.
La entrada de motor de 4 posiciones (izquierda/derecha/arriba/abajo) del EP-ZDWF permite a los diseñadores de plataformas coreanos dirigir el cable del servomotor en la dirección que evite obstrucciones: hacia el interior del chasis del AGV, a lo largo de la columna de la máquina o en paralelo al bastidor de la cinta transportadora. Para diseños que iteran a través de múltiples opciones de enrutamiento del motor durante el desarrollo, Korea Ever-Power suministra unidades de muestra del EP-ZDWF en cada dirección de entrada para evaluar el diseño antes de comprometerse con la producción en serie.
🇰🇷
Soporte de ingeniería coreano: ajuste de bridas, revisión de diseño y orientación de la información.
El equipo de aplicaciones de Korea Ever-Power en Corea ofrece asistencia en la selección del tamaño del bastidor EP-ZDWF, la adaptación del tamaño de la brida cuadrada a las dimensiones de la placa de la máquina, la selección de la dirección de entrada, el cálculo de la profundidad axial frente a alternativas en línea y la especificación de la brida de entrada del motor, todo ello en coreano. Para los fabricantes coreanos de AGV y maquinaria especializada que evalúan el EP-ZDWF, que ofrece una doble ventaja, el equipo proporciona un cálculo completo del espacio de instalación y la confirmación del patrón de orificios de la placa sin coste alguno antes de realizar el pedido.
Reseñas de clientes y comentarios sobre la aplicación
5 ★
87%
4 ★
11%
≤3 ★
2%
EP-ZDWF-60 en una sola etapa 10:1 para un AMR de perfil bajo con una altura de chasis de 130 mm. Nuestro chasis es una placa de aluminio de 4 mm cortada con láser; los orificios para los pernos del EP-ZDWF están incluidos en el archivo de corte sin costo adicional. El diseño anterior utilizaba una caja de engranajes de ángulo recto de la competencia con un orificio de salida redondo que requería una placa adaptadora perforada con precisión; agregar esa placa adaptadora aumentó la altura del chasis en 18 mm, superando nuestro objetivo de 130 mm. El EP-ZDWF se atornilla directamente a la placa del chasis sin el adaptador, manteniéndonos en 129 mm. Estamos produciendo más de 300 unidades AMR por año; a este volumen, eliminar la placa adaptadora ahorra 12 minutos de tiempo de ensamblaje y aproximadamente 850 KRW por unidad en costo de hardware. Korea Ever-Power confirmó que el patrón de orificios de nuestra placa de chasis era compatible en 3 horas.
EP-ZDWF-80 en 20:1 de dos etapas para un robot apilador de módulos de batería sobre una base de acero soldado. La estructura está fabricada con una sección de caja soldada de 100×100 mm; no hay instalaciones de mecanizado en el sitio. Necesitábamos un reductor de engranajes servo para el accionamiento del eje Z del cabezal de apilamiento, ya que no se disponía de la profundidad de la columna (220 mm disponibles) ni de la capacidad de mecanizado del orificio. El EP-ZDWF-80 con la dirección de entrada del motor hacia la derecha encajó exactamente dentro de 202,5 mm (2 etapas L1), con el motor saliendo hacia el espacio lateral disponible dentro de la columna. Soldamos una placa insertable cortada con láser de 10 mm en la estructura, perforamos 4 agujeros y atornillamos la caja de engranajes; el tiempo total de instalación fue de 45 minutos por eje, incluido el acoplamiento del motor. Se desplegaron 14 máquinas, que ahora llevan 18 meses funcionando sin problemas en la caja de engranajes.
EP-ZDWF-60 de dos etapas con relación 16:1 para la articulación de inclinación de la muñeca de un brazo robótico de placa de fibra de carbono. La estructura de nuestro brazo es una placa de CFRP de 3 mm fresada por CNC; el mandrinado de precisión es impracticable en CFRP delgado. La brida cuadrada EP-ZDWF se atornilla a un inserto de titanio unido al conjunto de la placa, el motor sale a lo largo del eje del antebrazo a través de la entrada en ángulo recto. El equipo de aplicaciones de Ever-Power de Corea proporcionó la dirección de entrada (motor hacia arriba) y la brida de entrada exacta para nuestro servomotor Delta en 6 horas después de enviar el plano del motor. Dimensión exterior de la articulación de inclinación de la muñeca: 74 mm, algo previamente imposible con accionamiento en línea a este nivel de par. Ahora lleva 11 meses en funcionamiento en un robot de recubrimiento de grado alimenticio; la grasa sellada de por vida es esencial para cumplir con nuestros requisitos de sala limpia.
Comparte tu experiencia con la solicitud de EP-ZDWF. Contacta con Korea Ever-Power: [email protected]
Productos relacionados de la gama Korea Ever-Power
El EP-ZDWF es la variante de entrada en ángulo recto y brida cuadrada de la línea Korea Ever-Power. caja de engranajes planetarios de precisión Serie EP. Las siguientes series están diseñadas para aplicaciones en las que solo se requiere una de las dos ventajas de la serie EP-ZDWF, o donde se necesita una mayor capacidad de torsión.
EP-ZDWE — Brida redonda de ángulo recto
Misma especificación de entrada de bisel en ángulo recto y par/juego que EP-ZDWF, con brida de salida redonda (circular) para montaje en orificio. Elija EP-ZDWE cuando la prioridad sea ahorrar espacio axial, pero se disponga de un orificio de precisión; la brida redonda proporciona mejor soporte de carga radial en algunos diseños.
EP-ZDF — Entrada en línea, brida cuadrada
Misma salida de brida cuadrada y especificaciones de par/juego que el EP-ZDWF, con entrada de motor coaxial en línea. Elija el EP-ZDF cuando no se requiera montaje en placa perforada, pero el espacio axial no esté restringido, y obtenga la eficiencia de una sola etapa del 96% (frente al 94% del EP-ZDWF) más un juego inferior a 8 minutos de arco (frente a entre 25 y 30 minutos de arco para el EP-ZDWF).
EP-ZDS — Alta rigidez, carga pesada
Cuando el EP-ZDWF-160 de 800 N·m resulta insuficiente, el EP-ZDS ofrece hasta 1800 N·m (marco 190) con entrada en línea, brida cuadrada, protección IP65, rigidez torsional de hasta 130 N·m/arcmin y una fuerza axial máxima de 28 000 N. Nota: El EP-ZDS solo admite entrada en línea; para cargas pesadas con requisitos de entrada en ángulo recto, póngase en contacto con Korea Ever-Power para obtener una solución personalizada.
Preguntas frecuentes
Información adicional
| Editor | Cxm |
|---|
Productos relacionados
-

Reductor planetario de precisión con brida redonda en ángulo recto de la serie EP-ADR (EP-ADR047 a EP-ADR255)
-

Reductor planetario de precisión con brida cuadrada en ángulo recto de la serie EP-ABR (EP-ABR042 a EP-ABR220)
-

Reductor planetario en línea de alta precisión con brida cuadrada estándar de la serie EP-AB (EP-AB042 a EP-AB220)
-

Reductor planetario de alta precisión de ángulo recto de la serie BADR — Brida redonda (EP-BADR047 a EP-BADR255)
-

Reductor planetario compacto de alta precisión para integración de servomotores — Serie PLS (PLS70–PLS190)
-

Reductor planetario económico estándar para la industria en general — Serie PL (PL40–PL160)
-

Reductor planetario de ángulo recto para accionamientos con espacio limitado — Serie WPLE/WPLF
-

Caja de engranajes planetarios de doble eje EPL para sistemas de transmisión por cadena


























