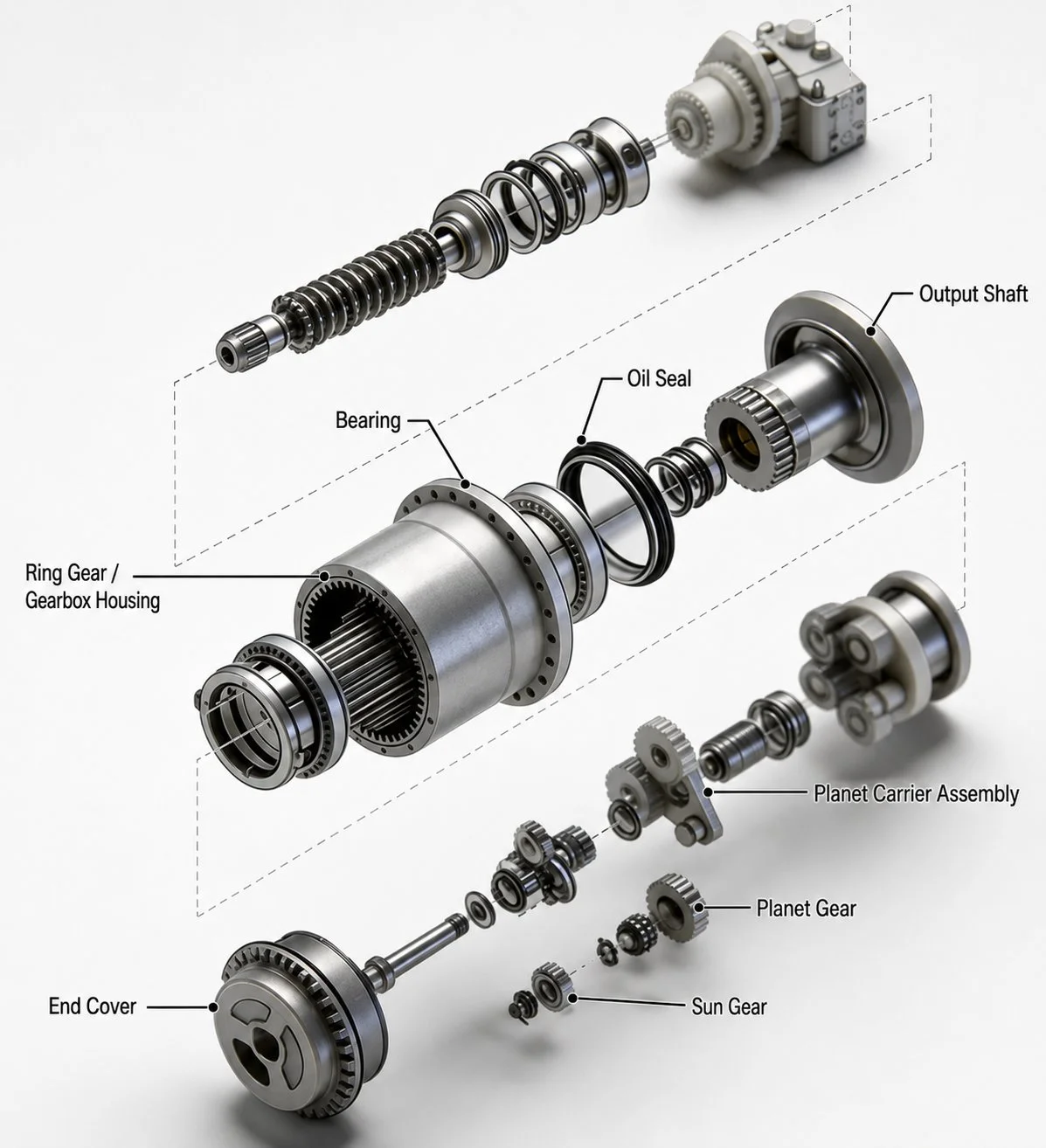
Penggerak Winch 402W2 Gearbox Reducer Planetary

TWO-STAGE
402W2 — 3,500 RPM, Multi-Ratio, Brake-Free
The EP-402W2 marks two transitions in the winch drive planetary gearbox range: from single-stage to two-stage (unlocking ratios from 12.4 to 37.1), and from low-speed orbit motors to high-speed axial piston motors at 3,500 rpm. Both changes serve the same goal — delivering 4,000 Nm of drum torque with smaller, lighter, less expensive hydraulic motors that operate at higher speeds and lower pressures than the large-displacement units the single-stage 400/401 models require.
The absence of an integrated brake is not a cost reduction — it is an engineering statement. The 402W2 is designed for hoisting systems where the braking architecture is more sophisticated than a single spring-applied disc inside the gearbox. Marine deck cranes with DNV-certified counterbalance valves. Free-fall lifeboat davits with dual-independent hydraulic braking circuits. Heavy construction hoists with motor-mounted electromagnetic brakes plus separate drum-mounted calliper brakes. In each of these systems, an additional brake inside the gearbox would be redundant weight that contributes nothing to safety because the external braking system already provides the required holding capacity and regulatory compliance.
402W2 Winch Drive Planetary Gearbox — Technical Parameters
| Torsi keluaran terukur | 4,000 Nm |
| Gear ratio range | 12.4 to 37.1 (two-stage planetary) |
| Maximum input speed | 3,500 rpm |
| Maximum output speed | 25 rpm (FEM M5 continuous duty) |
| Mechanical efficiency | ≥ 95% |
| Integrated brake | None (external braking system required) |
| Pemasangan | Rotating housing flanges (direct drum integration) |
| Berat kering | Approx. 115 kg |
| Pelumasan | Oil bath splash, high-grade EP gear oil |
| Suhu pengoperasian | -20 to +85 deg C (Viton seals available) |
No Gearbox Brake on a Winch — How to Hold a Suspended Load Safely
A brake-free winch drive planetary gearbox places the entire load-holding responsibility on the external system. Unlike a wheel drive without a brake (where the worst case is that the vehicle rolls), a winch drive without a brake means a suspended load WILL descend uncontrolled if the external braking fails. The system design must provide at least two independent means of holding the load.
① Motor-Integrated Brake
Most axial piston motors (Rexroth A2FM/A6VM, Eaton, Parker) offer a factory-integrated spring-applied, hydraulic-release brake on the motor shaft. This brake acts through the 402W2 gear ratio: a 30 Nm motor brake at ratio 25 produces 750 Nm of holding torque at the drum. Verify that this multiplied value exceeds the maximum suspended load torque at the outer cable layer. This is the simplest and most common external braking method for hydraulic winch systems.
② Counterbalance Valves
A counterbalance valve in each motor port line prevents the load from overrunning the motor during lowering. When the pump stops, the counterbalance valve traps the oil in the motor circuit, locking the motor and drum in position. This provides a hydraulic hold that is independent of any mechanical brake. For crane applications certified to EN 13001 or FEM standards, the counterbalance valve is typically the primary hold mechanism, with the motor brake as the secondary.
③ External Drum Calliper Brake
A separate calliper brake mounted on the drum flange or the winch frame, acting directly on a brake disc welded to the drum cheek plate. This provides a completely independent mechanical hold that does not depend on the gearbox, the motor, or the hydraulic circuit. For safety-critical lifting (personnel hoisting, offshore crane certification), this third independent brake is often required by the classification society or the site safety standard as a tertiary hold mechanism.
Never operate the 402W2 with a suspended load unless at least two independent holding mechanisms are verified and functional. A single brake failure must not result in uncontrolled load descent. This is not a recommendation — it is a regulatory requirement under virtually every international lifting equipment standard.
From 1,000 to 3,500 RPM — What the Two-Stage Architecture Unlocks
The single-stage 400W1 and 401W1 accept 1,000 rpm — the speed range of large-displacement, low-speed orbit motors (200-500 cc/rev). The 402W2 at 3,500 rpm opens the door to small-displacement, high-speed axial piston motors (20-80 cc/rev) that produce the same output torque at a fraction of the physical size and cost.
Smaller, Lighter Motors
A 250 cc/rev orbit motor at 1,000 rpm weighs approximately 25-35 kg. A 45 cc/rev axial piston motor producing the same torque at 3,500 rpm weighs 8-12 kg. On a marine crane where weight aloft directly affects vessel stability, this 60-70% motor weight reduction matters. On a construction hoist where the motor mounts inside a confined drum housing, the smaller physical envelope may be the only option that fits.
Lower System Pressure
At higher motor speed and lower displacement, the system pressure required to produce the same output power is lower. Lower pressure means less stress on hoses, fittings, seals, and the pump — extending the service life of every component in the hydraulic circuit. The 402W2 ratio range (12.4-37.1) is specifically designed to allow the motor to operate at 2,000-3,000 rpm in the most efficient pressure band of a typical 250-350 bar axial piston circuit.
Variable Speed Without Valving Complexity
Variable-displacement axial piston motors allow infinite speed variation by swashplate adjustment — from full speed to zero — without any external valving or flow control. Combined with the 402W2 ratio, this provides precise hoisting speed control from full-speed lifting down to controlled, creep-speed positioning, all from the motor control alone. The 402W2 gears transmit whatever speed and torque the motor delivers, in either direction, without mechanical restriction.
Multi-Ratio Flexibility
The 12.4-37.1 ratio range allows the winch designer to match the gearbox to the exact motor displacement and pump flow available in the system. A crane OEM using a 40 cc/rev motor at 120 L/min pump flow selects ratio 25. A marine winch builder using a 63 cc/rev motor at 80 L/min selects ratio 15. The same 402W2 serves both, with the ratio chosen at order to match the specific hydraulic circuit design. Contact Korea Ever-Power with your motor and flow specifications for a verified ratio recommendation.
High-Speed Winch Drive Applications at 4,000 Nm
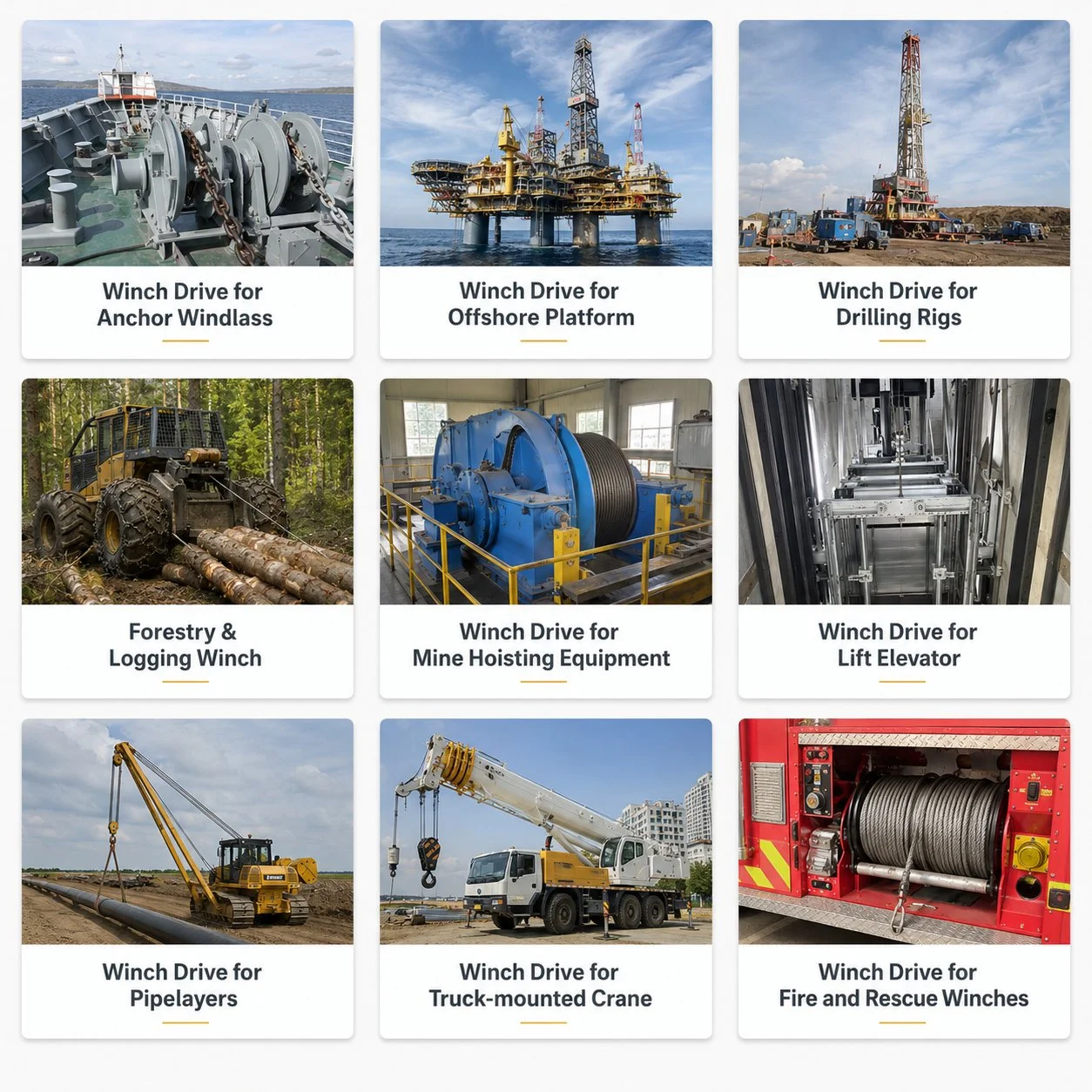
Marine Deck Cranes (5-10 Tonne SWL)
Deck-mounted knuckle-boom and telescopic cranes on supply vessels, research ships, and coastal freighters. These cranes use DNV- or Lloyd-certified hydraulic circuits with counterbalance valves as the primary hold mechanism and motor-integrated brakes as the secondary. The 402W2 brake-free design integrates directly into this architecture without adding a redundant third brake inside the gearbox. The gearbox planet penggerak putar handles the crane rotation on the same vessel.
Free-Fall Lifeboat Davit Recovery Winches
Free-fall lifeboat davits on offshore platforms and FPSOs use the winch only for recovery (hauling the lifeboat back to the stowed position after a drill or deployment). The launch is gravity-driven — no winch involvement. The 402W2 provides the 4,000 Nm needed to pull a 5-8 tonne lifeboat up a slipway at controlled speed, while the dual counterbalance valves in the davit hydraulic circuit provide all load-holding functions. Adding a brake inside the gearbox would not improve the safety case — it would only add weight to a system where davit head weight affects the platform structural loading calculation.
Heavy Construction Material Hoists
High-capacity material hoists on large construction sites lifting 1-3 tonne loads of reinforcement bar, formwork panels, and precast elements. These hoists typically use motor-mounted electromagnetic brakes (primary) plus a drum-mounted calliper brake (secondary) as the dual-brake system required by construction lifting regulations. The 402W2 delivers the drum torque while the external brakes handle the holding function, allowing the winch designer to specify each brake independently for optimal sizing and redundancy.
Need a Brake Inside? The 403W2 Alternative
If your application requires an integrated gearbox brake — because the external system cannot provide the required holding capacity or the applicable standard mandates a brake within the drum assembly — the 403W2 is the direct counterpart to the 402W2. Same 4,000 Nm torque, same two-stage architecture, same FEM M5 rating, plus an integrated 270 Nm multi-disc brake.



Winch Drive Planetary Gearbox — Brake-Free and High-Speed FAQ
Field Reports
8-tonne SWL knuckle-boom crane on a platform supply vessel. The 402W2 at ratio 28 paired with a 45 cc/rev Rexroth A2FM motor and dual counterbalance valves. The brake-free design was the correct choice for this application — our DNV-certified hydraulic circuit provides motor brake plus counterbalance hold, and adding a third brake inside the gearbox would have required re-certification of the entire braking system. The 402W2 passed the DNV type approval survey without any additional documentation beyond the standard product data sheet and material certificates. Clean and simple.
Free-fall lifeboat davit recovery winch for an FPSO project. The winch only operates in the hoisting direction — recovering the 6.5-tonne lifeboat after a drill deployment. The 402W2 at ratio 18 with a 63 cc/rev variable-displacement motor gives us 15 m/min recovery speed at full load. The brake-free design was specifically requested by the platform operator because their maintenance procedure treats gearbox-internal brakes as an inspection item that requires drum removal — which on an FPSO means a crane and three-day work permit. No internal brake means no brake inspection means no drum removal. The counterbalance valves provide all holding functions and are accessible from outside the drum housing.
2.5-tonne materials hoist for high-rise construction. The 402W2 at ratio 25 with a motor-mounted electromagnetic brake (primary) and a drum calliper brake (secondary). Mechanically the drive is solid and the hoisting speed control through the variable-displacement motor is smooth. The 4-star reflects a documentation issue: the product data sheet lists "external braking system required" but does not specify the MINIMUM brake holding torque needed at the drum for various load scenarios. We calculated it ourselves from the torque and ratio, but a pre-calculated table showing "at X load on Y drum PCD, minimum external brake torque = Z" would have accelerated our safety case submission by a week.
Informasi Tambahan
| Editor | Cxm |
|---|
Produk terkait
-

ZL95 Winch Drive Planetary Gearbox
-

Penggerak Winch 416W3 Gearbox Reducer Planetary
-

Penggerak Winch 415W3 Gearbox Reducer Planetary
-

414W3 Winch Drive Planetary Gearbox Reducer
-

Penggerak Winch 410W3 Gearbox Reducer Planetary
-

Penggerak Winch 406AW Gearbox Reducer Planetary
-

403W2 Penggerak Winch Gearbox Reducer Planetary — 2-Tahap
-

Penggerak Winch 400W1 Gearbox Reducer Planetary


























