High-Precision Compact Planetary Gearbox for Servo Integration — PLS Series (PLS70–PLS190)
")
The PLS Series high-precision planetary gearbox is engineered for demanding servo motor integration where space constraints prohibit standard-frame reducers, and where backlash must be held to ≤3 arcmin to satisfy positioning accuracy requirements across extended multi-axis linkages. Five frame sizes — PLS70 through PLS190 — deliver rated output torque from 27 N·m up to 1,000 N·m with maximum input speeds reaching 14,000 rpm on the PLS70 frame, enabling pairing with high-speed brushless servo motors without intermediate coupling stages. Full-load efficiency reaches ≥97%, and sealed lifetime lubrication eliminates maintenance interventions across the 30,000-hour service life. IP54 protection, any-angle mounting, and IEC-standard motor adapter plates make PLS series the reference specification for robotic joint actuators, CNC precision axes, semiconductor handling equipment, and high-throughput automated assembly where positioning accuracy and long-term backlash consistency determine product quality outcomes.
High-Precision Compact Gearbox — Where Servo Performance Demands More
の PLS series precision planetary gearbox extends the performance class of our PLE/PLF precision range into a higher torque bracket while maintaining the ≤3 arcmin backlash specification that precision servo applications demand. Five frame sizes from PLS70 through PLS190 deliver rated output torque from 27 N·m up to 1,000 N·m — covering servo motors from compact 50 W units to 5,000 W industrial servo drives in a single series selection framework.
The standout specification is the 14,000 rpm maximum input speed on the PLS70 frame — the highest in our entire 遊星ギアボックス range. This enables direct coupling to high-speed brushless servo motors that run at 6,000–10,000 rpm without requiring intermediate coupling stages or spindle-speed reduction. Sealed lifetime lubrication, IP54 protection, and any-angle mounting make PLS series equally suited to vertical joint actuators in robots, horizontal feed axes in CNC machining centres, and cleanroom-compatible semiconductor handling systems.
PLS70 / PLS90 / PLS120 / PLS150 / PLS190 — Model Comparison
All five frames maintain the ≤3 arcmin precision-grade backlash specification and ≥97% single-stage efficiency. The progression from PLS70 to PLS190 increases torque capacity and output shaft bearing load rating while reducing maximum input speed to match the lower-rpm characteristics of higher-power servo motors.
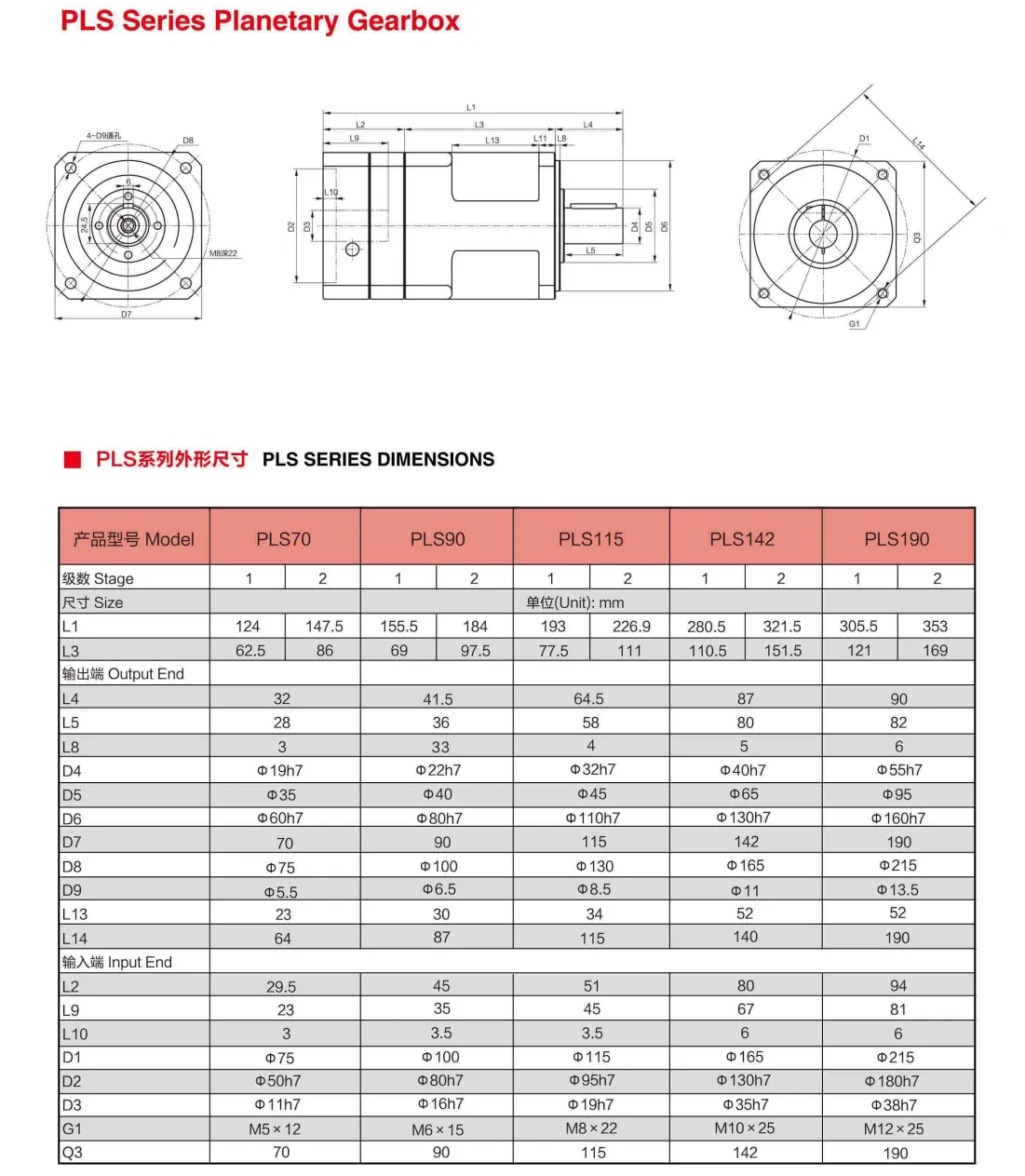
| パラメータ | PLS70 | PLS90 | PLS120 | PLS150 | PLS190 |
|---|---|---|---|---|---|
| Rated Output Torque | 27–90 N・m |
50–180 N・m |
100–350 N・m |
200~600 N・m |
400–1,000 N・m |
| Max Input Speed (no-load) | 14,000 回転数 |
10,000 回転数 |
8,000 回転数 |
6,000 回転数 |
6,000 回転数 |
| 対応モーター出力 | 50–400 W | 200–1,000 W | 500–2,000 W | 1,000–3,500 W | 2,000–5,000 W |
| Backlash (Precision Grade) | ≤ 3 arcmin — all frame sizes | ||||
| Backlash (Standard Grade) | ≤ 5 arcmin — all frame sizes | ||||
| Full-Load Efficiency | ≥ 97% single-stage · ≥ 94% two-stage | ||||
| ギア比範囲 | 3 : 1 — 512 : 1 (single & multi-stage) | ||||
| 動作温度 | −25℃~+90℃ | ||||
| 保護等級 | IP54 standard · IP65 available | ||||
| Service Life (rated load) | 30,000 hours | ||||
PLS series targets applications requiring higher output torque than PLE/PLF can deliver (above 1,000 W motor) while maintaining the same ≤3 arcmin precision specification. If your application uses a motor below 1,000 W, PLE/PLF is the appropriate choice with equivalent precision at lower cost.
PLS Series — Precision at Higher Power
The PLS series occupies the performance gap between precision servo reducers limited to small motors and high-power industrial reducers that sacrifice backlash accuracy. Understanding where PLS sits in the full product family helps engineers make the right selection decision the first time.
| シリーズ | 反発 | 最大トルク | Max Input rpm | Best For |
|---|---|---|---|---|
| PLS (this series) | ≤3分角 | 1,000 N·m | 14,000 rpm | High-power servo, large robot joints, precision CNC |
| PLE/PLF | ≤4–6 arcmin | ~200 N·m | 14,000 rpm | Standard servo, small-medium robot joints |
| PZB | ≤3分角 | 2,000 N·m | — | High-power + noise-sensitive (>6 kW) |
| PF | 6–12 arcmin | 625 N·m | 3,500 rpm | Heavy industrial, shock loads, IP65 |
| PL | 10–20 arcmin | 800 N·m | 10,000 rpm | General automation, cost-optimised |
選ぶ PLS when you need ≤3 arcmin backlash AND your motor exceeds 1,000 W.
選ぶ PLE/PLF for ≤4 arcmin at motors below 1,000 W.
選ぶ PZB when motor power exceeds 6 kW and noise is a constraint.
Engineering Architecture — How PLS Maintains ≤3 Arcmin at High Torque
Achieving ≤3 arcmin backlash at 1,000 N·m output torque presents a fundamentally different manufacturing challenge than achieving the same backlash at 200 N·m. Higher torque requires larger gear teeth with greater dimensional tolerances — yet backlash must be held tighter. PLS series resolves this through four interconnected design decisions that work together rather than independently.
- 1
Four-Planet Carrier Symmetry
PLS190 uses four planet gears rather than three, distributing the 1,000 N·m output torque across four simultaneous contact points. This reduces per-tooth Hertz stress to levels equivalent to a three-planet unit at one-third the torque — enabling tighter manufacturing tolerances without pushing surface pressure beyond the material fatigue limit that would degrade backlash over time.
- 2
Diamond-Lapped Ring Gear Bore
The ring gear internal tooth surface undergoes a final diamond-lapping operation after grinding, achieving surface finish Ra ≤0.2 µm and removing residual grinding burn layers that could cause micro-pitting under high-cycle contact stress. This preserves initial backlash specification throughout the 30,000-hour service life rather than allowing gradual wear-induced increase.
- 3
Integrated Output Flange Bearing Pre-Set
The output flange and its angular-contact bearing pair are assembled and preloaded as a single matched unit, then measured for radial and axial runout before installation into the housing. Matched-bearing preloading eliminates the bearing clearance that contributes 20–30% of total measurable backlash in conventional assemblies using separate standard bearings.
- 4
100% Final Backlash Sorting — No Statistical Sampling
Every PLS unit is measured individually on a calibrated angular encoder bench. Units that measure above the grade limit are classified to the next grade down (precision to standard, standard to stock) rather than shipped as precision grade with a statistical defect rate. This means the backlash specification on the label is a guaranteed measured value, not a population mean.
High-Power Precision Applications — Where PLS Excels
Large Industrial Robot Joints
Six-axis industrial robots rated for 10–30 kg payloads use servo motors in the 1,000–3,500 W range for shoulder and elbow joints — precisely the power range where PLE/PLF tops out and PLS begins. The ≤3 arcmin backlash matches the ≤0.05 mm TCP (tool centre point) repeatability specification that industrial robot manufacturers specify as standard. PLS150 and PLS190 handle the high output torque from combined motor torque and payload inertia at extended reach positions. Pairs naturally with precision CVドライブシャフト for forearm link extensions.
5-Axis CNC Machining Centres
5-axis CNC machines with tilting rotary table A and B axes drive tables carrying workpieces up to 200 kg through 3,500 W servo motors. Positioning accuracy at these axes directly determines surface quality on titanium and nickel alloy aerospace parts. PLS series ≤3 arcmin backlash translates to ±0.05° angular accuracy at the tool-workpiece interface — meeting ISO 10791-1 Grade 1 rotary axis positioning requirements without additional error compensation algorithms.
Semiconductor FOUP Handling
Front-opening unified pod (FOUP) transfer robots in 300 mm wafer fabs operate in Class 1 cleanrooms where any particle generation from the gearbox disqualifies the unit. PLS series sealed housing and grease fill prevents particle shedding; the ≤3 arcmin specification maintains FOUP slot alignment within ±1 mm at 1.2 m arm reach. PLS70 and PLS90 cover the 50–400 W servo motors typical of FOUP handler joint actuators.
アプリケーションクイックリファレンス
- ✦ Large Industrial Robot Joints
- ✦ 5-Axis CNC Rotary Tables
- ✦ Semiconductor FOUP Robots
- ✦ High-Speed Laser Cutting Axes
- ✦ Medical Surgical Robot Arms
- ✦ Electron Microscope Stages
- ✦ Precision Pick-and-Place
- ✦ Optical Telescope Mounts
- ✦ Radar & Antenna Positioning
High-Speed Laser Cutting
Fiber laser cutting gantry axes drive at 2,000–3,500 W with rapid acceleration demands that stress gearbox backlash at direction reversals. PLS120 and PLS150 maintain ≤3 arcmin through >50 million cutting cycles — preventing the kerf-width variation that develops with standard grade reducers as backlash increases with wear.
Medical Surgical Robot Arms
Robotic surgery systems require absolute repeatability across thousands of identical procedures. PLS70 units in da Vinci-class instrument arms must maintain backlash specification without the mechanical backlash compensation that would introduce algorithm-dependent variability into surgical tool positioning.
Radar & Antenna Systems
Phased-array radar and satellite dish positioning drives require precise azimuth and elevation axis control where backlash introduces pointing error during direction reversal. PLS190 handles the high sustained torque from wind loading on large antenna structures while maintaining ≤3 arcmin pointing repeatability.

Frame Size Selection — PLS70 through PLS190
PLS70 — Ultra-High-Speed Compact (50–400 W, 14,000 rpm)
The only gearbox in the PLS range rated to 14,000 rpm — matching the top speed of high-performance brushless servo motors without intermediate reduction. Rated torque 27–90 N·m covers small robot wrist joints, FOUP handler arm links, and compact laser cutting head axes. The 70 mm compact frame fits within the arm link profiles of collaborative robot designs where space is severely constrained.
PLS90 — Cobot & Light Robot (200–1,000 W, 10,000 rpm)
Collaborative robot shoulder and elbow joints in the 3–5 kg payload class specify PLS90 for rated torque 50–180 N·m at 200–1,000 W motors. The 10,000 rpm input limit covers all standard collaborative robot servo motor operating speeds. Most popular PLS frame for new cobot development projects.
PLS120 — Industrial Robot & CNC ★ Most Specified
The most commonly specified PLS frame for 10–20 kg payload industrial robot joints, 5-axis CNC rotary table A/B axes, and precision laser cutting XY gantry drives. Rated torque 100–350 N·m at 500–2,000 W. Covers the majority of industrial servo motor pairings in this precision class.
PLS150 — Heavy Robot & Large Rotary Table
20–30 kg payload industrial robots, large CNC rotary tables for 200 kg workpieces, and antenna/radar precision positioners specify PLS150 for rated torque 200–600 N·m at 1,000–3,500 W motors. The larger output shaft handles the combined bending and axial loads from heavy workpiece clamping forces during machining.
PLS190 — Maximum Precision (2,000–5,000 W, up to 1,000 N·m)
The largest PLS frame for heavy-payload robot base axes, large precision rotary tables, and high-power antenna positioning drives. Rated torque 400–1,000 N·m at 2,000–5,000 W makes PLS190 the only series that delivers ≤3 arcmin precision at kilonewton-metre output levels. Four-planet carrier design provides the symmetry needed to maintain backlash specification at maximum torque output. Connects downstream to 自己ロック式ウォームステージ on vertical load-holding axes.
Quality Certifications & Precision Verification
For cleanroom applications, PLS series material certificates confirm that no SVHC (Substance of Very High Concern) is used in housing, gear, or lubricant specification — supporting ISO 14644 cleanroom compatibility documentation for semiconductor fab equipment qualification packages.
工場出荷時受入検査 ― 全製品対象
- ✔ Individual backlash measurement — ≤3 arcmin verified per unit
- ✔ Output shaft runout — radial ≤0.01 mm, axial ≤0.01 mm
- ✔ Full-load efficiency at 50%, 75%, 100% rated torque
- ✔ High-speed noise test at 10,000 rpm input (PLS70/90)
- ✔ IP54 ingress seal test — pressure differential method

Why Engineers Specify PLS Series
🎯
Fills the Precision-Power Gap
No other series combines ≤3 arcmin backlash with 1,000 N·m output torque and 14,000 rpm input speed simultaneously. PLS bridges the range where PLE/PLF is underpowered and PF/PL are insufficiently precise.
🏭
Guaranteed Measured Backlash
100% per-unit backlash measurement with grade sorting — the specification on the datasheet is a measured value for your specific unit, not a population statistic with a 5% defect rate.
🧬
Cleanroom Compatible
Sealed grease fill with zero external vents, no particle-shedding surfaces, and SVHC-free material certificates support ISO 14644 semiconductor cleanroom equipment qualification without modification.
📐
Consistent Backlash Over 30,000 Hours
Diamond-lapped ring gear surfaces and matched bearing preloading maintain initial backlash specification throughout service life — not just at initial commissioning. Robots recalibrated at 3 years retain the same positioning accuracy as day one.
🔌
IEC Motor Adapters — All Major Brands
IEC B5/B14 adapter plates for Fanuc, Yaskawa, Mitsubishi, Siemens, and ABB servo motor flanges included. No custom machining required for the world's most common robot and CNC servo motors.
🛡️
2-Year Warranty, Precision Spec Guaranteed
24-month warranty covering backlash specification, bearing integrity, and seal performance. Backlash guarantee is written into the warranty terms — not just a nominal datasheet value.
システム統合:補完製品
PLS series gearboxes form the precision core of high-performance robot and CNC drivetrain systems. These products are most frequently integrated alongside PLS series.

→ 精密CVドライブシャフト
Zero-backlash CV shafts with ≤0.005 mm runout for connecting PLS output flanges to robot forearm links, linear ball-screw ends, and rotary table driven flanges without introducing additional backlash or misalignment-induced bending forces into the gearbox output bearing.
- ▸ Zero additional backlash contribution
- ▸ Runout ≤0.005 mm — cleanroom compatible
→ セルフロック式ウォームギアボックス
For vertical robot axes and Z-axis machine tool drives where gravity load requires fail-safe holding torque on power loss, a worm stage downstream of PLS provides self-locking capability without adding backlash to the precision positioning chain — using PLS for accuracy and worm for safety.
- ▸ Self-locking at ratios ≥40:1
- ▸ No external brake required on vertical axes
→ Bevel Stage Power Split
For multi-head precision assembly systems and dual-wrist robot configurations where a single PLS drive must power two perpendicular output axes simultaneously, a high-precision bevel stage splits PLS output power with minimal additional backlash contribution.
- ▸ Precision bevel pairs ≤5 arcmin
- ▸ Efficiency 96–98% per stage
顧客レビューと現場での実績
5つ星
85%
4★
13%
≤3 ★
2%
PLS120 units for a 15 kg payload 6-axis robot shoulder joint. The ≤3 arcmin specification was what our simulation required for ±0.05 mm TCP accuracy at 1.4 m reach. After 14 months of 2-shift production, backlash measured at the last maintenance check was still within specification. The per-unit measurement certificate was essential for our ISO 9283 robot acceptance test documentation.
PLS70 on our 300 mm wafer FOUP handler wrist joint. The SVHC-free material certificate was the deciding factor over a Japanese competitor — our fab qualification process requires this documentation. 16 months in Class 1 cleanroom operation with zero particle events or gearbox-related wafer contamination incidents. 14,000 rpm input speed allowed us to use a smaller, lighter servo motor than competitors recommended.
PLS150 for the A-axis on a 5-axis machining centre for titanium aerospace parts. The ≤3 arcmin specification was a hard customer requirement for first-article titanium part acceptance. 18 months later the axis positioning accuracy is still within ±0.025° — better than our spindle calibration interval requires. The IEC adapter plate for our Siemens 1FT7 motor was a perfect fit with zero machining.
PLS120 in a 6 kW fiber laser cutting head gantry — both X and Y axes. After 80 million direction reversals (confirmed by machine counter) kerf width variation is still ±0.03 mm. With our previous standard-grade reducers we were recalibrating every 2 million cycles to compensate for worn backlash. The PLS investment paid back in reduced calibration downtime within 5 months.
よくある質問
追加情報
| エディタ | Cxm |
|---|
関連製品
-

EP-ABRシリーズ 直角角フランジ精密遊星歯車減速機(EP-ABR042~EP-ABR220)
-

EP-AFシリーズ 高剛性出力軸インライン遊星歯車減速機(EP-AF042~EP-AF220、およびEP-AFXバリアント)
-

EP-ADSシリーズ 丸フランジ型インライン遊星歯車減速機 ― 5種類の減速比(EP-ADS047~EP-ADS255)
-

BADRシリーズ 直角高精度遊星歯車減速機 - 丸フランジ(EP-BADR047~EP-BADR255)
-

BABシリーズ高精度遊星歯車減速機 - 標準フランジ(EP-BAB042~EP-BAB220)
-

一般産業向け標準経済型遊星歯車減速機 — PLシリーズ(PL40~PL160)
-

VRシリーズ チェーン伝動用高精度遊星ギアボックス
-

産業用チェーンドライブ向けPLS精密遊星ギアボックス


























