ZR55 Winch Drive Planetary Gearbox — Right-Angle

THIRD ARCHITECTURE
ZR55
The motor turns 90 degrees.
The 4xxW mounts coaxially for hydraulic motors. The ZL mounts coaxially for electric motors. The EP-ZR55 winch drive planetary gearbox turns the input shaft perpendicular to the drum — opening the final architecture for every installation where the space behind the drum is occupied by structure, by another machine, or by nothing at all.
The ZR55 is the entry point to a seven-model right-angle winch drive family spanning 55,000-175,000 Nm — running parallel to the ZL series at identical torque levels but with a 90-degree bevel input stage that redirects the motor shaft perpendicular to the drum axis. The bevel stage adds one mandatory gear mesh (the right-angle turn), which is why the ZR series starts at 2 stages (1 bevel + 1 planetary) instead of the ZL single-stage minimum. The 3,300 rpm input speed — lower than the ZL 4,000-5,000 rpm — reflects the bevel gear peripheral velocity limit at the ZR housing size. In every other respect — torque, peak capacity, gear accuracy, sealing, housing material — the ZR55 matches the ZL55 specification exactly.
ZR55 Right-Angle Winch Drive Planetary Gearbox — Technical Parameters
| Continuous torque (N2xh=100,000) | 55,000 Nm |
| Peak torque | 112,000 Nm (2.04x continuous) |
| Input configuration | Right-angle (90 deg helical bevel + planetary) |
| Maximum input speed | 3,300 rpm |
| Available stages | 2-5 (1 bevel + 1-4 planetary) |
| Thermal power (Pt) | 24 - 74 kW (varies by stage count) |
| Gear type | Helical bevel + helical planetary, DIN 5-6 |
| Integrated brake | None (motor brake or external brake) |
| Sealing / Housing | IP67+ FKM / QT600-3 |
| Gear material | 20CrMnTi, HRC 58-62 |
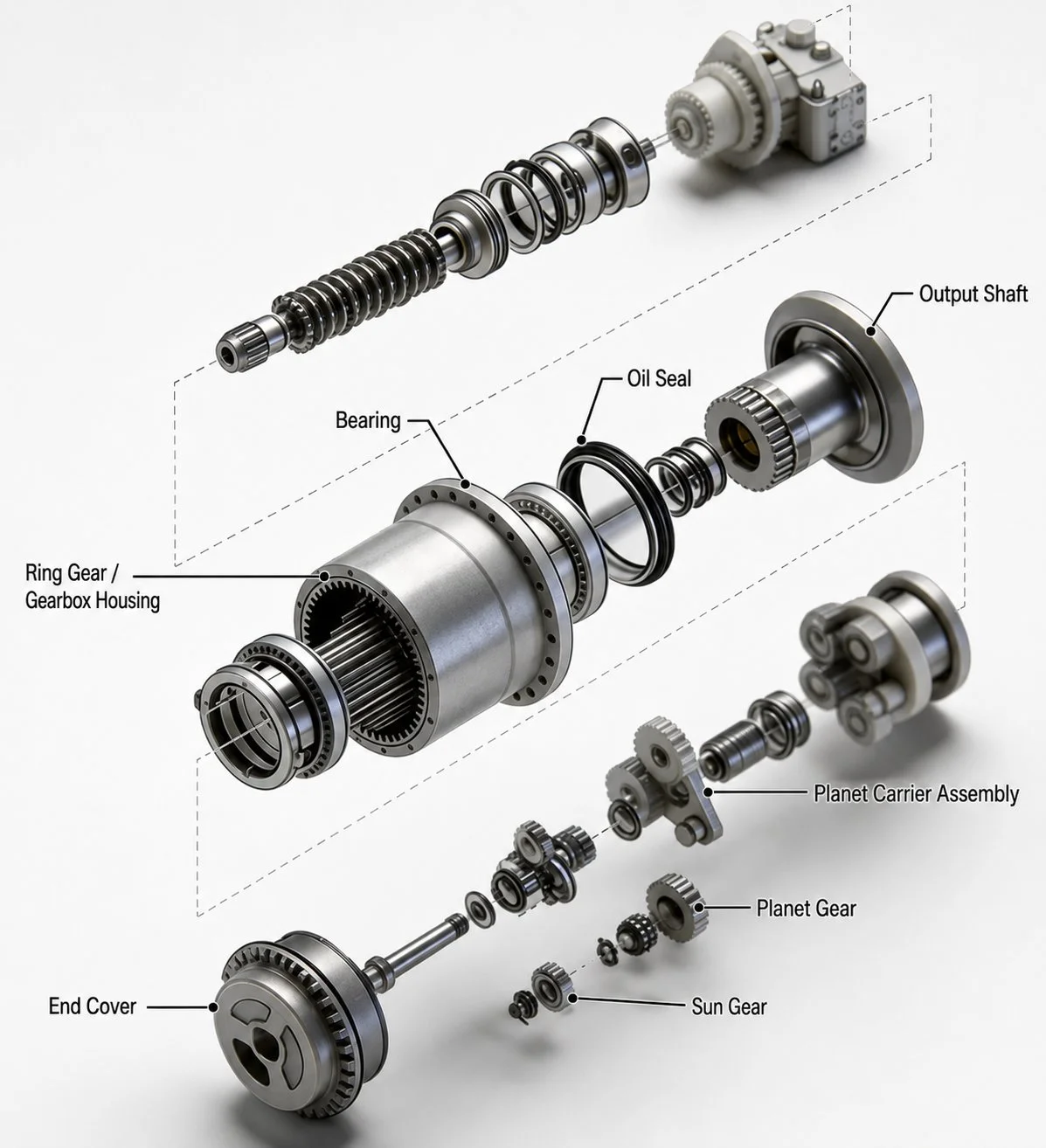
Right-Angle Input — Why the Motor Goes Perpendicular and How It Works
The ZR bevel stage redirects the motor torque 90 degrees before it enters the planetary gear train. This is not a convenience feature — it is a geometric necessity for installations where a coaxial motor physically cannot fit.
A matched pair of helical bevel gears — one on the input shaft (motor side) and one on the intermediate shaft (planetary side) — mesh at 90 degrees. The bevel pair provides the first ratio reduction (typically 1.5-3.5:1) and the direction change simultaneously. The intermediate shaft then drives the first planetary stage in the same manner as the ZL series. The bevel gears are ground to DIN 5-6 accuracy and operate in the same oil bath as the planetary stages.
Bevel gears at the ZR55 pitch diameter produce tooth peripheral velocities that reach the lubrication film limit at approximately 3,300 rpm. Above this speed, the bevel tooth contact would risk scuffing — metal-to-metal contact through the oil film. The ZL coaxial series avoids this constraint because it has no bevel stage. The 3,300 rpm ZR limit matches standard 4-pole industrial motors at 50 Hz (3,000 rpm synchronous) and 6-pole motors at 60 Hz (3,600 rpm synchronous) — both common in industrial and marine applications.
The bevel stage adds one gear mesh (approximately 1-2% efficiency loss), the bevel gear pair weight, and the right-angle housing volume. The ZR55 at 2-stage (bevel + 1 planetary) is slightly less efficient than the ZL55 at 1-stage (planetary only): approximately 93-94% versus 96-97%. At 5-stage (bevel + 4 planetary), both converge at approximately 90-91% because the additional planetary mesh losses dominate. The right-angle geometry also generates a thrust load on the bevel shaft bearings that the coaxial ZL does not produce — handled by the heavy-series tapered roller bearings in the ZR housing.
ZR55 vs ZL55 — Same Torque, Different Geometry, Different Applications
| Параметр | ZL55 (Coaxial) | ZR55 (Right-Angle) |
|---|---|---|
| Continuous / Peak | 55,000 / 112,000 | 55,000 / 112,000 |
| Motor axis | Parallel to drum | Perpendicular to drum |
| Максимальная скорость ввода | 4000 об/мин | 3,300 rpm |
| Min stages | 1 | 2 (bevel + 1 planetary) |
| Max stages | 5 | 5 (bevel + 4 planetary) |
| Efficiency (2-stage) | ~96% | ~93-94% |
| Motor mounting | Behind drum (axial) | Beside/below drum |
| Pt / Thermal | 24-74 kW | 24-74 kW |
The drum has axial depth for the motor behind the gearbox. The application needs single-stage low ratios (below the ZR minimum). Maximum efficiency matters (96% vs 93%). The motor speed exceeds 3,300 rpm (up to 5,000 rpm for later ZL models).
No axial space behind the drum — the motor must mount beside, below, or above. The bulkhead, hull frame, or headframe column is directly behind the drum cavity. The motor alignment is simpler with a perpendicular mount. The motor is a standard 4-pole or 6-pole industrial motor at 3,000-3,300 rpm.
55,000 Nm Right-Angle — For Every Winch Where the Motor Cannot Sit Behind the Drum

Retrofit Crane Hoists in Existing Machinery Rooms
Crane hoist conversions where the existing machinery room layout places a bulkhead, hydraulic tank, or structural column directly behind the drum position. A coaxial ZL motor would project into the occupied space. The ZR55 redirects the motor 90 degrees — mounting it alongside the drum within the existing room footprint. For offshore platform crane conversions where the deck penetrations and structural layout are fixed, the right-angle geometry is often the only way to fit an electric winch drive without structural modification.
Marine Deck Winches Against Hull Frames
Mooring, towing, and cargo winches mounted against the hull shell plating where the drum axis runs athwartship (across the vessel) and the motor must mount fore-and-aft (along the vessel) to avoid projecting outboard through the hull. The ZR55 right-angle input turns the motor shaft parallel to the ship centreline while the drum operates athwartship — the standard geometric arrangement for deck winches on tankers, bulk carriers, and offshore support vessels. The slewing drive handles the fairlead positioning on the same vessel.
Mining Headframe Narrow-Profile Winders
Auxiliary winders on mine headframes where the winder house width is constrained by the headframe column spacing. A coaxial motor projecting axially behind the drum would exceed the available depth. The ZR55 mounts the motor perpendicular — reducing the total assembly depth by 30-40% compared to the coaxial equivalent. For mine electrification programmes converting hydraulic auxiliary hoists in existing headframes, the ZR geometry fits where the ZL cannot.
The ZR Right-Angle Winch Drive Family


Right-Angle Winch Drive Planetary Gearbox — ZR Series FAQ
Field Reports
40 t offshore platform crane, hydraulic-to-electric conversion. The original machinery room has a structural bulkhead 400 mm behind the drum housing — impossible to fit a coaxial ZL motor. The ZR55 at ratio 80, 2-stage, with a 300 kW motor mounted perpendicular to the drum, fits within the existing room envelope with 50 mm clearance to the bulkhead. No structural modification required. The conversion eliminated the HPU, oil cooler, and 120 metres of hydraulic hose. The crane has completed 9 months of operation since conversion — the operators report no perceptible difference in hoisting performance compared to the hydraulic system, but the noise reduction is "dramatic" (their word).
Electric mooring winch on an LNG carrier, ZR55 at ratio 120, 3-stage, 150 kW AC motor mounted parallel to the ship centreline while the drum axis runs athwartship. This is the standard geometry for deck winches on large commercial vessels — the coaxial ZL would have projected the motor outboard through the hull strake. The ZR55 right-angle input is the geometrically correct solution for this installation. The IP67+ sealing has survived 14 months of deck wash and saltwater exposure without any seal degradation. Mooring line snatch loads measured at 2.1x steady-state during berthing in crosswind — absorbed within the 112,000 Nm peak without any VFD fault.
Auxiliary winder on a 1960s-era mine headframe, ZR55 at ratio 200, 4-stage, 100 kW AC motor. The headframe winder house is 1.2 metres deep between the drum and the back wall — no room for a coaxial motor. The ZR55 motor mounts vertically below the drum on a bracket welded to the existing headframe column, with the right-angle input turning the torque upward into the drum. Total installation footprint: 600 mm x 800 mm versus the 600 mm x 1,400 mm that the coaxial ZL55 would have required. The 4-star is a vibration observation: the bevel gear mesh produces a 1,200 Hz tonal component that was detectable on the headframe vibration monitor. The amplitude is well within structural limits but the monitoring system initially flagged it as an anomaly until we updated the baseline to include the bevel mesh frequency. For ZR installations on monitored structures, providing the expected bevel mesh frequency range in the commissioning documentation would prevent false alarm investigations.
Детали
| Редактор | Cxm |
|---|
Сопутствующие товары
-

ZL200 Winch Drive Planetary Gearbox
-

ZL75 Winch Drive Planetary Gearbox
-

ZL35 Winch Drive Planetary Gearbox — 1-4 Stage
-

Планетарный редуктор привода лебедки 415W3
-

407AW Winch Drive Planetary Gearbox Reducer
-

406W Winch Drive Planetary Gearbox Reducer
-

405W Winch Drive Planetary Gearbox Reducer
-

403W2 Winch Drive Planetary Gearbox Reducer — 2-Stage


























