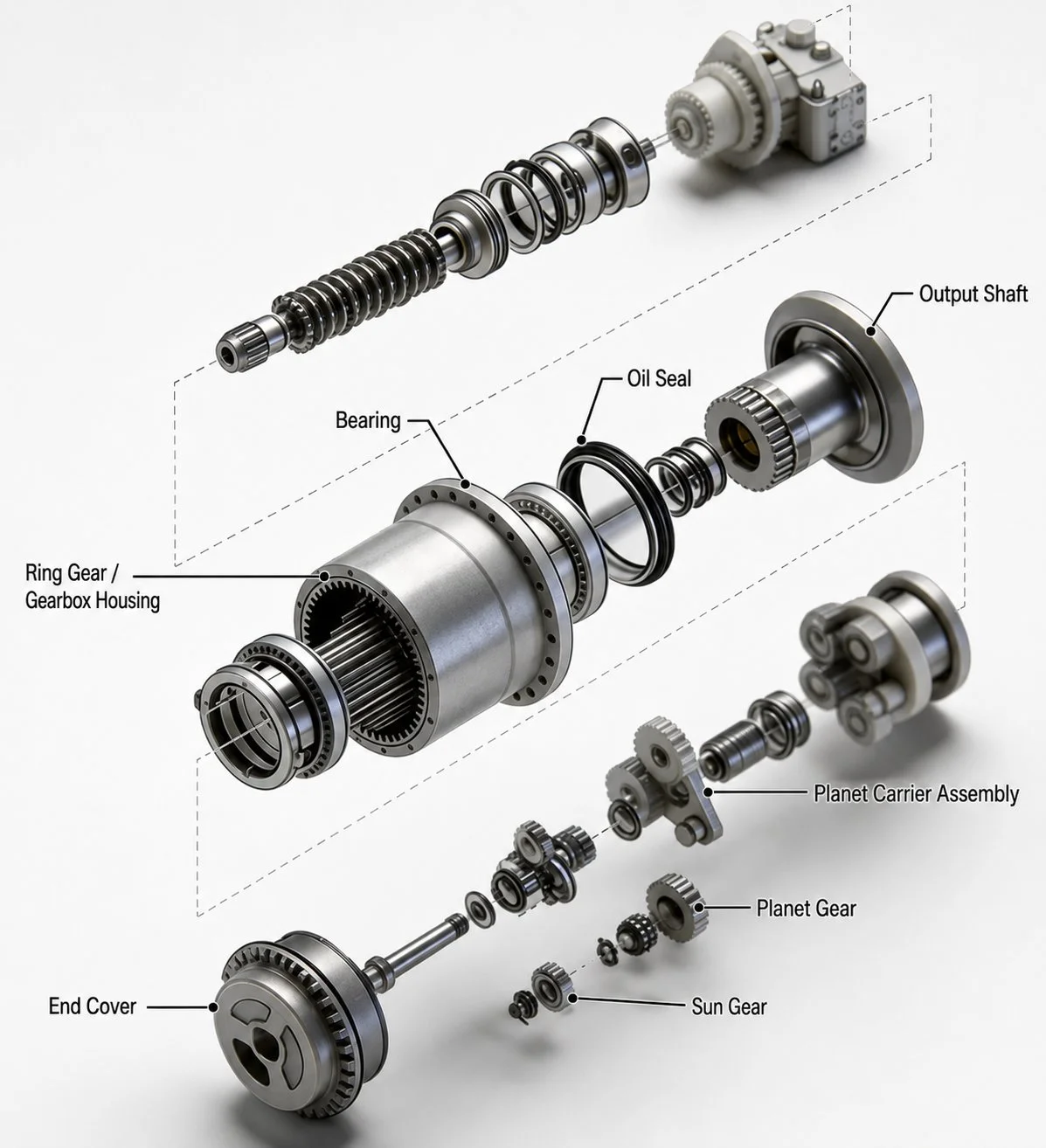
Planétová prevodovka s pohonom navijaka ZR85 – pravouhlá

PEAK = 416W3 MEGA-TRIEDA
ZR85 — 88 000 Nm
Špička 200 000 Nm. Kolmý motor. Účelovo vyrobený pre vysoké zaťaženie.
EP-ZR85 je planétová prevodovka pohonu navijaka kde pravouhlá séria prestáva byť alternatívnou geometriou a začína byť primárnou špecifikáciou pre ťažké inštalácie, ktoré sú od začiatku navrhnuté okolo kolmého motora.
ZR55 a ZR75 slúžia predovšetkým ako dodatočné vybavenie – montáž elektrických pohonov do existujúcich priestorov, kam sa koaxiálne prevodovky nedostanú. ZR85 s krútiacim momentom 88 000 Nm je miesto, kde sa pravouhlá architektúra stáva zámernou prvou voľbou pre nové návrhy: lodné navijakové systémy, kde os bubna prebieha priečne podľa konvencií námornej architektúry, navíjačky ťažobných hlavíc, kde je motor namontovaný vertikálne na konštrukčnom stĺpe podľa praxe projektovania hlavíc, a priemyselné mostové žeriavy, kde motor visí kolmo na bubon vďaka geometrii žeriavového mosta. Tieto inštalácie nie sú obmedzené – sú navrhnuté pre kolmú montáž motora už od prvého technického náčrtu.
Technické parametre planétovej prevodovky s pravouhlým pohonom navijaka ZR85
| Trvalý krútiaci moment (N2xh=100 000) | 88 000 Nm |
| Maximálny krútiaci moment | 200 000 Nm (2,27x, = 416W3 kontinuálne) |
| Konfigurácia vstupu | Pravouhlý (90-stupňový špirálový skosený + planetárny) |
| Maximálna vstupná rýchlosť | 3 100 ot./min. |
| Dostupné etapy | 2-5 (1 skosený + 1-4 planetárny) |
| Tepelný výkon (Pt) | 26 – 90 kW |
| Typ prevodového stupňa | Špirálové kužeľové + špirálové planétové, DIN 5-6 |
| Integrovaná brzda | Žiadna (motorová brzda alebo externá brzda) |
| Tesnenie / Puzdro | IP67+ FKM / QT600-3 |
| Materiál ozubeného kolesa | 20CrMnTi, HRC 58-62 |
Vrchol 200 000 Nm cez 90-stupňový skosený rez – prechodový jav triedy Mega z kolmého motora
Model 4xxW 416W3 dodáva nepretržitý krútiaci moment 200 000 Nm pri hmotnosti 1 850 kg s koaxiálnym hydraulickým motorom. Model ZR85 dodáva špičkový krútiaci moment 200 000 Nm prostredníctvom 90-stupňového skosenia s elektromotorom namontovaným kolmo na bubon. Prechodová kapacita je rovnaká; geometria a pohon sú odlišné.
Dvojica kužeľových ozubených kolies ZR85 prenáša špičkový krútiaci moment 200 000 Nm pri otočení o 90 stupňov bez prekročenia limitu ohybu zubov brúsených špirálových kužeľových ozubených kolies podľa DIN 5-6. Špičkový stupeň kužeľového ozubeného kolesa vytvára na ložiskách kužeľových hriadeľov axiálnu silu približne 4 000 – 6 000 N – ktorú absorbujú kužeľové valčeky ťažkej série dimenzované na toto presné zaťaženie pri projektovanej životnosti 100 000 hodín. Kužeľové zuby sú najviac namáhanými komponentmi ZR85 pri špičkovom krútiacom momente – a sú navrhnuté presne pre tento stav.
80-tonový žeriav s trvalým krútiacim momentom bubna 70 000 Nm zažíva 2,5-násobný náraz drapákového žeriavu: prechodový jev = 175 000 Nm. Námorný kotvový navijak s trvalým krútiacim momentom 60 000 Nm zažíva 3,0-násobné trhacie zaťaženie: prechodový jev = 180 000 Nm. Banský navíjací stroj s 80 000 Nm zažíva 2,2-násobný ráz z nakladania kontajnerov: prechodový jev = 176 000 Nm. Všetky tri udalosti spadajú do vrcholu ZR85 200 000 Nm – absorbovaného cez skosený stupeň a planétové stupne bez prekročenia limitu akejkoľvek zložky.
Pri trvalom krútiacom momente 88 000 Nm s motorom s výkonom 500 – 700 kW váži motor 600 – 1 000 kg. Koaxiálne uloženie umiestňuje túto hmotnosť konzolovo za bubon, čím vytvára ohybový moment na ložiskách nosnej konštrukcie bubna. Pravouhlé uloženie umiestňuje hmotnosť motora vedľa alebo pod bubon – bližšie k ťažisku nosnej konštrukcie. Pri veľkých žeriavoch a lodných navijakoch môže pravouhlá geometria znížiť požiadavky na konštrukciu nosnej konštrukcie bubna o 10-20%, pretože hmotnosť motora je lepšie rozložená. Kontakt Kórea Ever-Power pre odporúčania týkajúce sa montážnej geometrie pre vašu konkrétnu inštaláciu.
Od dodatočnej montáže k účelovej výrobe – ZR85 je navrhnutý, nie namontovaný
ZR55 a ZR75 sa najčastejšie objavujú ako riešenia pre dodatočnú montáž – montáž elektrického pohonu do existujúceho priestoru. ZR85 sa najčastejšie objavuje v novostavbách, kde sa kolmá montáž motora volí už vo fáze návrhu, pretože vytvára lepšie rozloženie inštalácie.
Na komerčných plavidlách a podporných plavidlách na mori sa os bubna hlavného palubného navijaka konvenčne otáča priečne k lodi (naprieč trámom plavidla). Motor sa musí otáčať v prednej aj zadnej časti (pozdĺž dĺžky plavidla), aby sa zabránilo vyčnievaniu von z lode. Nejde o priestorové obmedzenie – ide o konvenciu námornej architektúry, ktorá je štandardom už storočie. Každý palubný navijak na priečne k lodi v triede 50 – 80 ton je už svojou konštrukciou, nie štandardne, určený pre vozidlá s ťažkými nákladmi (ZR).
V banských hlaviciach je navíjací bubon umiestnený vodorovne, zatiaľ čo motor je často namontovaný zvisle na konštrukčnom stĺpe vedľa bubna – ide o kompaktné usporiadanie, ktoré minimalizuje podlahovú plochu navíjacej haly. Vertikálne uloženie motora je zámernou konštrukčnou voľbou pre hlavice s obmedzenou podlahovou plochou, nie kompromisom. Pravouhlý vstup ZR85 spája vertikálny motor s vodorovným bubnom prostredníctvom 90-stupňového skosenia – štandardnej geometrie pre moderné kompaktné navíjacie haly.
Na veľkých mostových žeriavoch (50 – 80 t) sa bubon zdvíhacieho zariadenia nachádza pod nosníkom žeriavového mosta. Dostupná výška medzi bubnom a mostom je zvyčajne 400 – 800 mm – čo nie je dostatočné pre koaxiálny motor nad bubnom. ZR85 montuje motor horizontálne pozdĺž bubna, čím sa celková výška zdvíhacieho zariadenia udržiava v rámci svetlej výšky mosta. Toto je štandardná geometria zdvíhacieho zariadenia pre novostavby ťažkých žeriavov EOT v oceliarňach, elektrárňach a lodiarskych halách.
88 000 Nm pravouhlý – určený pre námorné, banícke a priemyselné použitie s vysokou záťažou

Ťažké námorné palubné navijaky (ťah lana 50 – 80 t)
Navijaky na manipuláciu s kotvami, ťahanie a kotvenie na plavidlách, kde bubon beží naprieč loďou. ZR85 s prevodovým pomerom 60-150, 2-4 stupne, s motormi s výkonom 400-700 kW poskytuje krútiaci moment hlavného palubného navijaka pre podporné plavidlá na mori, remorkéry na manipuláciu s kotvami a veľké nákladné plavidlá. Vrchol 200 000 Nm zvláda zaťaženie pri trhaní zo zapojenia ťažného lana, zacvakávania kotvovej reťaze a napínania núdzového kotviaceho lana. otočný pohon zaoberá sa polohovaním predného a zadného valčeka na tej istej lodi.
Elektrické navíjačky ťažobných rámov
Hlavné a pomocné navíjačky na banských hlaviciach v hĺbke šachty 300 – 700 metrov, kde je motor vertikálne namontovaný na stĺpe hlavice. ZR85 s prevodovým pomerom 100 – 300 s motormi s výkonom 300 – 600 kW poskytuje krútiaci moment navíjania s rekuperáciou a kompaktnou podlahovou plochou, ktorú vyžadujú moderné konštrukcie hlavíc. Pravouhlá geometria eliminuje axiálny presah koaxiálneho motora – čím sa hĺbka navíjacej komory znižuje o 500 – 800 mm v porovnaní s... Koaxiálny ekvivalent ZL85.
Ťažké elektrické mostové žeriavy (50 – 80 t)
Novostavby elektrických mostových žeriavov v oceliarňach, pri vyraďovaní jadrových zariadení z prevádzky a v ťažkom priemysle, kde sa bubon zdvíhacieho zariadenia nachádza pod mostovým nosníkom s obmedzenou vertikálnou svetlou výškou nad ním. ZR85 s prevodovým pomerom 60-120 montuje motor vedľa bubna – celková výška zdvíhacieho zariadenia sa udržiava v rozmedzí 600-800 mm pre štandardné svetlostné vzdialenosti mostových nosníkov. Špičkový krútiaci moment 200 000 Nm absorbuje rázy pri zapojení panvy, nárazy pri upnutí formy a sily kývania pri veľkom zaťažení, ktoré samotný trvalý výkon nedokáže pokryť.
Rodina pravouhlých pohonov navijakov ZR


Planétová prevodovka s pravouhlým pohonom navijaka — ZR85 Heavy Duty – najčastejšie otázky
Terénne správy
Hlavný palubný navijak na novostavbe 120 m dlhej podpornej lode na otvorenom mori, ZR85 s prevodovým pomerom 100, 3-stupňový striedavý motor s výkonom 500 kW namontovaný vpredu a vzadu, zatiaľ čo bubon beží naprieč loďou. Ide o novostavbu – ZR85 bol špecifikovaný z prvého výkresu všeobecného usporiadania, pretože bubon umiestnený naprieč loďou je štandardom námornej architektúry pre túto triedu plavidiel. Vrchol 200 000 Nm zvládol prvé zaťaženie pri vytiahnutí kotvovej reťaze (merané pri 2,4-násobku ustáleného stavu snímačom zaťaženia) bez akejkoľvek udalosti ochrany VFD. Regenerácia počas zotavenia reťaze: 19% energie pri vytiahnutí. Staviteľ plavidla štandardizoval ZR85 pre všetky palubné navijaky v triede 60 – 80 t vo svojich ďalších 4 novostavbách OSV.
Hlavná produkčná navíjačka na novopostavenom kompaktnom ráme ťažnej haly v 550-metrovej chrómovej bani, ZR85 s prevodovým pomerom 200, 4-stupňový striedavý motor s výkonom 400 kW namontovaný vertikálne na stĺpe rámu ťažnej haly. Pravouhlá geometria znížila podlahovú plochu navíjačky z plánovaných 4,2 x 3,8 m (koaxiálny ZL85) na 3,2 x 3,8 m – čím sa ušetrilo 3,8 m² podlahovej plochy a jeden stĺp rámu ťažnej haly. Tím stavebných inžinierov bane odhadol, že sa tým ušetrilo 1,2 milióna ZAR na nákladoch na oceľ rámu ťažnej haly a základy. Navíjačka dokončila 6 mesiacov výroby s 280 cyklomi za deň s regeneráciou nameranou na 241 TP3T – čo prekročilo cieľ 201 TP3T v energetickom rozpočte. Trend analýzy oleja je čistý; vibrácie sú ploché.
70-tonový mostový žeriav v oceliarňach na valcovanie za tepla, ZR85 s prevodovým pomerom 80, dvojstupňový striedavý motor s výkonom 600 kW namontovaný horizontálne vedľa bubna. Svetlá výška nosníka žeriavového mosta nad bubnom je 620 mm – celková výška zdvihu ZR85 je 580 mm so 40 mm rezervy. Koaxiálny ZL85 by mal výšku 920 mm, čo by si vyžadovalo kompletnú prestavbu mostného nosníka v hodnote približne 180 000 USD. ZR85 by zachránil most a rozpočet. Vrchol 200 000 Nm zvláda rázy pri zapojení cievky (merané pri 1,9-násobku kontinuálneho zrýchlenia) počas zdvihu horúcej bramy. Štvorhviezdičkové hodnotenie je poznámka o vystavení teplu: teplota okolia v polohe bubna dosahuje počas valcovania 50 – 55 °C. Teplota oleja dosahuje vrchol pri 76 °C – v rámci limitu 85 °C, ale s menšou rezervou ako je návrhová teplota okolia 20 °C predpokladaná vo výpočte Pt. V prípade oceliarní by uvedenie Pt pri okolitej teplote 50 °C namiesto 20 °C poskytlo realistickejší návod na dimenzovanie motora.
Ďalšie informácie
| Redaktor | Cxm |
|---|
Súvisiace produkty
-

Planétová prevodovka s pohonom navijaka ZL45 — 1-4 stupne
-

Planétová prevodovka s reduktorom pohonu navijaka 416W3
-

Planétová prevodovka s reduktorom pohonu navijaka 415W3
-

Planétová prevodovka s reduktorom pohonu navijaka 410W3
-

406W planétová prevodovka s reduktorom pohonu navijaka
-

Planétová prevodovka s reduktorom pohonu navijaka 405.4W
-

405W planétová prevodovka s reduktorom
-

Planétová prevodovka s pohonom navijaka 403W2 – 2-stupňová


























