ชุดเกียร์ทดรอบแบบดาวเคราะห์ความแม่นยำสูงสำหรับเซอร์โวความเร็วสูง — ซีรีส์ VR

ชุดเกียร์ดาวเคราะห์ความแม่นยำสูงแบบศูนย์กลางร่วม VR Series ออกแบบมาสำหรับการใช้งานร่วมกับมอเตอร์เซอร์โวความเร็วสูง โดยที่ต้องการเอาต์พุตแบบแกนร่วม และต้องลดการคลายตัวให้น้อยที่สุด เพื่อการควบคุมตำแหน่งแบบวงปิดที่แม่นยำ มีให้เลือกทั้งแบบ S-type (เพลาอินพุตแบบแข็ง) และ F-type (เพลาอินพุตแบบกลวง) มีขนาดเฟรมให้เลือก 4 ขนาด คือ B, C, D และ E ครอบคลุมมอเตอร์เซอร์โวตั้งแต่ 50 วัตต์ ถึง 5,000 วัตต์ ด้วยอัตราทดเกียร์ตั้งแต่ 3:1 ถึง 81:1 การจัดเรียงอินพุต-เอาต์พุตแบบแกนร่วมช่วยให้ได้ความแม่นยำในศูนย์กลางที่ยอดเยี่ยมและการเบี่ยงเบนรัศมีน้อยที่สุด ทำให้ VR Series เป็นสเปคที่เหมาะสมสำหรับไดรฟ์แกนหมุนความเร็วสูง หัวหมุนดัชนีความแม่นยำสูง ระบบอัตโนมัติในห้องปฏิบัติการ และการใช้งานใดๆ ที่มอเตอร์และโหลดมีแกนศูนย์กลางร่วมกัน และความกะทัดรัดของเฟรมจำกัดขนาดโดยรวมของเครื่องจักรโดยตรง
เกียร์ทดรอบแบบดาวเคราะห์ศูนย์กลางร่วม — ความแม่นยำแบบแกนร่วมสำหรับไดรฟ์เซอร์โวขนาดกะทัดรัด
เดอะ เกียร์ทดรอบดาวเคราะห์แบบศูนย์กลางซีรีส์ VR ตัวลดเกียร์แบบหน้าแปลนช่วยแก้ปัญหาการรวมระบบเฉพาะอย่างที่ตัวลดเกียร์แบบหน้าแปลนไม่สามารถทำได้ นั่นคือ การใช้งานที่เพลาขับต้องอยู่บนแกนเดียวกันกับเพลาของมอเตอร์ โครงสร้างของเครื่องจักรไม่อนุญาตให้มีการเยื้องศูนย์ด้านข้างระหว่างมอเตอร์และโหลด และการลดความเร็วต้องทำได้โดยไม่ต้องใช้เฟืองมุมฉากหรือเฟืองเยื้องศูนย์ที่เพิ่มความยาว น้ำหนัก และการคลายตัว เอาต์พุตแบบแกนเดียวกันของ VR ช่วยให้มอเตอร์และโหลดอยู่บนแกนกลางเดียวกัน — เพลามอเตอร์เข้า เพลาเอาต์พุตที่ลดเกียร์ออกอยู่บนแกนเดียวกัน — ในตัวเรือนที่มีเส้นผ่านศูนย์กลางเพิ่มขึ้นเพียงความหนาของผนังเฟืองวงแหวนดาวเคราะห์เท่านั้นเมื่อเทียบกับเส้นผ่านศูนย์กลางของเฟรมมอเตอร์เอง
การกำหนดค่าอินพุตสองแบบครอบคลุมสถานการณ์การเชื่อมต่อมอเตอร์ทุกรูปแบบ: แบบ S (เพลาอินพุตแบบแข็ง) สำหรับการเชื่อมต่อโดยตรงผ่านข้อต่อแบบเบลโลว์หรือข้อต่อแบบก้ามปูเข้ากับเพลามอเตอร์มาตรฐาน และ แบบ F (แบบรูกลวงสำหรับป้อนวัสดุ) สำหรับการติดตั้งมอเตอร์โดยตรงผ่านเพลา ซึ่งช่วยขจัดชิ้นส่วนเชื่อมต่อทั้งหมด ลดการคลายตัว ลดเวลาในการประกอบ และลดความยาวโดยรวมของระบบ ขนาดเฟรม B ถึง E ครอบคลุมความเข้ากันได้ของเซอร์โวมอเตอร์ตั้งแต่ 50 วัตต์ ถึง 5,000 วัตต์ โดยมีอัตราทดเกียร์ตั้งแต่ 3:1 ถึง 81:1
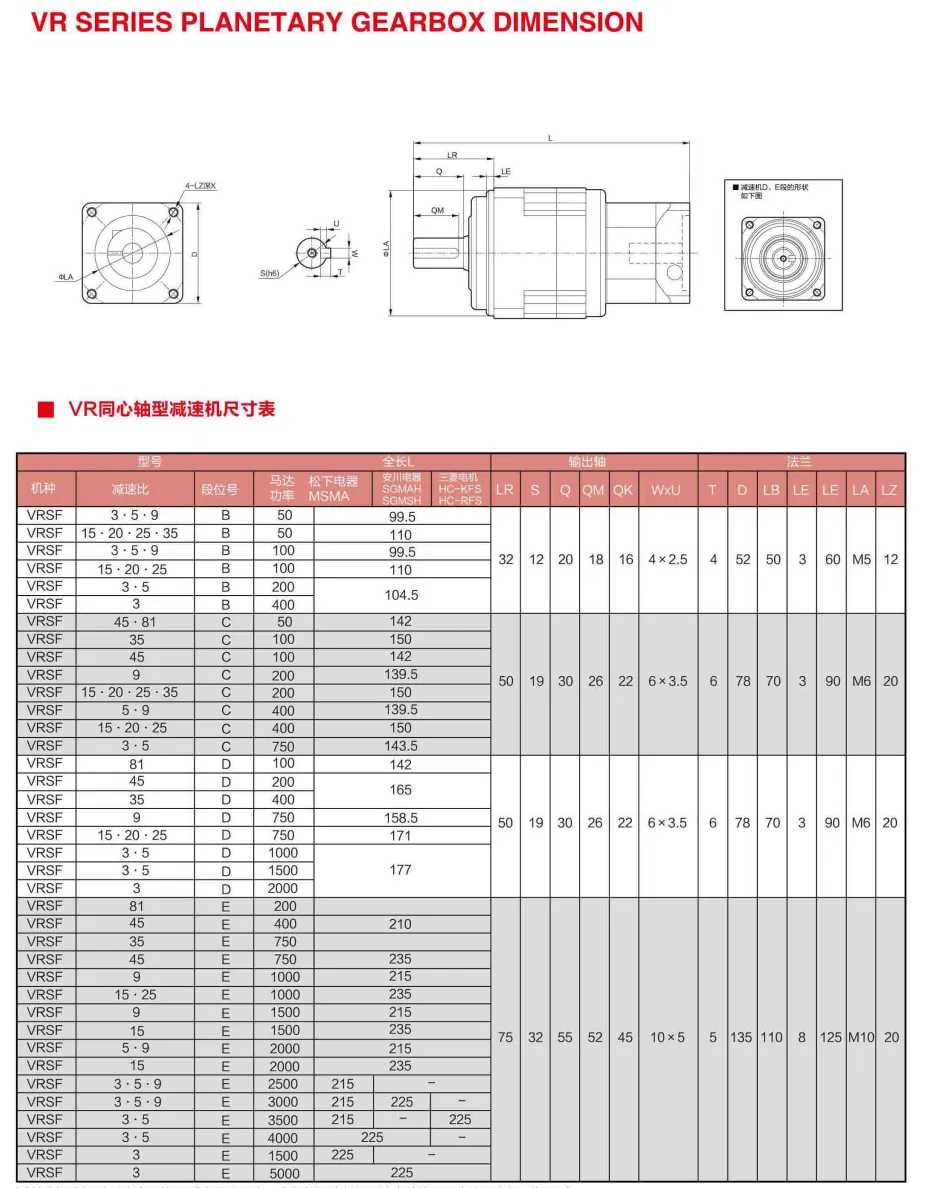
ข้อมูลจำเพาะทางเทคนิค — เฟรม B ถึง E, ประเภทอินพุต S และ F
แบบ S และแบบ F มีขนาดภายนอกและหน้าแปลนทางออกที่เหมือนกันในแต่ละขนาดเฟรม ความแตกต่างอยู่ที่วิธีการเชื่อมต่อทางเข้าเท่านั้น — เลือกแบบ S เมื่อคุณต้องการส่วนประกอบการเชื่อมต่อแยกต่างหาก และเลือกแบบ F เมื่อการติดตั้งเพลามอเตอร์โดยตรงเหมาะสมกับกระบวนการประกอบของคุณ
เพลาอินพุตแบบแข็ง รุ่น VR-S
- ▸ เพลาอินพุตมีร่องสำหรับยึดข้อต่อ
- ▸ สามารถใช้งานร่วมกับมอเตอร์ทุกชนิดผ่านทางข้อต่อแบบเบลโลว์หรือข้อต่อแบบก้ามปูได้
- ▸ รองรับการเยื้องศูนย์ของเพลาผ่านการเลือกข้อต่อ
- ▸ เหมาะสำหรับการเปลี่ยนมอเตอร์โดยไม่ต้องถอดเกียร์
- ▸ เหมาะสำหรับ: ระบบอัตโนมัติในห้องปฏิบัติการ อุปกรณ์ทดสอบ เซอร์โวทั่วไป
ชนิด VR-F — รูเจาะกลวง ★ นิยมใช้มากที่สุด
- ▸ แกนมอเตอร์ลอดผ่านรู – ไม่ต้องใช้อุปกรณ์เชื่อมต่อใดๆ
- ▸ ความยาวแกนระบบขั้นต่ำ — หน้าแปลนมอเตอร์ชนกับเกียร์โดยตรง
- ▸ การมีส่วนร่วมของการเชื่อมต่อเป็นศูนย์ต่อการเกิดการคลาดเคลื่อนของระบบโดยรวม
- ▸ แหวนล็อกแบบไม่ต้องใช้ร่องกุญแจ ช่วยยึดเพลาของมอเตอร์โดยไม่ต้องใช้ร่องกุญแจ
- ▸ เหมาะสำหรับ: ระบบขับเคลื่อนแกนหมุน, การจัดตำแหน่งความเร็วสูง, การออกแบบที่คำนึงถึงพื้นที่จำกัด
| พารามิเตอร์ | เฟรม บี | เฟรม C | เฟรม D | เฟรม E |
|---|---|---|---|---|
| กำลังมอเตอร์ที่เข้ากันได้ | 50–200 วัตต์ | 200–750 วัตต์ | 750–2,200 วัตต์ | 2,200–5,000 วัตต์ |
| ช่วงอัตราทดเกียร์ | 3 : 1 — 81 : 1 (ทุกเฟรม) | |||
| ประเภทอินพุตที่มีให้เลือก | แบบ S (เพลาตัน) · แบบ F (รูเจาะกลวง) — มีให้เลือกในทุกเฟรม | |||
| การกำหนดค่าเอาต์พุต | โคแอกเซียลอินไลน์ — อินพุตและเอาต์พุตอยู่บนเส้นศูนย์กลางเดียวกัน | |||
| อุณหภูมิในการทำงาน | −25 °C ถึง +90 °C | |||
| ระดับการป้องกัน | มาตรฐาน IP54 · สามารถขอรับมาตรฐาน IP65 ได้หากต้องการ | |||
| การหล่อลื่น | จาระบีปิดผนึกตลอดอายุการใช้งาน — ไม่ต้องบำรุงรักษา | |||
| อายุการใช้งาน | ใช้งานได้ 30,000 ชั่วโมงที่โหลดพิกัด | |||
| ทิศทางการติดตั้ง | ทิศทางใดก็ได้ | |||
เลือก รูกลวงแบบ F เมื่อเส้นผ่านศูนย์กลางเพลาของมอเตอร์ตรงกับขนาดรูที่มีอยู่ และความยาวตามแนวแกนขั้นต่ำเป็นสิ่งสำคัญในการออกแบบ ให้เลือก เพลาแข็งรูปตัว S เมื่อเส้นผ่านศูนย์กลางเพลาของมอเตอร์แตกต่างกัน หรือเมื่อจำเป็นต้องเปลี่ยนมอเตอร์โดยไม่ต้องถอดชุดเกียร์เพื่อเข้าถึงการบำรุงรักษา
เหตุใดรูปทรงแกนร่วมจึงมีประสิทธิภาพเหนือกว่าตัวลดเกียร์แบบเยื้องศูนย์ในระบบขับเคลื่อนที่ต้องการพื้นที่จำกัด
ที่สุด เกียร์ทดรอบดาวเคราะห์ ใช้การจัดเรียงเอาต์พุตแบบหน้าแปลนที่เพลาส่งออกยื่นออกมาจากด้านหน้าของตัวเรือน โดยเยื้องจากเพลาของมอเตอร์ด้วยเส้นผ่านศูนย์กลางของตัวยึดเฟืองดาวเคราะห์และชุดเฟืองวงแหวน รูปทรงเรขาคณิตนี้ทำให้ผู้ออกแบบเครื่องจักรต้องรองรับเส้นศูนย์กลางเพลาขนานสองเส้นที่คั่นด้วยความหนาของผนังเฟืองวงแหวน ในระบบขับเคลื่อนแกนหมุน หัวดัชนีแบบหมุน และระบบอัตโนมัติในห้องปฏิบัติการที่ขนาดของเสาเครื่องจักรหรือแชสซีมีข้อจำกัดอย่างมาก การเยื้องนี้จะสร้างความขัดแย้งในการออกแบบที่บังคับให้ต้องปรับเปลี่ยนเค้าโครงเครื่องจักรใหม่หรือใช้ตัวเรือนที่มีขนาดใหญ่เกินความจำเป็น ซีรี่ส์ VR ขจัดปัญหาการเยื้องนี้ออกไปอย่างสิ้นเชิง
ข้อดีทางวิศวกรรม 4 ประการของเอาต์พุตโคแอกเซียลแท้
- 1
ขนาดเครื่องจักรขั้นต่ำ — ไม่มีการเยื้องศูนย์ของเส้นศูนย์กลาง
ตัวเรือน VR เพิ่มความหนาในแนวรัศมีของชุดเฟืองดาวเคราะห์เข้าไปในเส้นผ่านศูนย์กลางของเฟรมมอเตอร์เท่านั้น ในการออกแบบเสาขนาดเส้นผ่านศูนย์กลาง 60 มม. ตัวลดเกียร์ดาวเคราะห์มาตรฐานที่มีเอาต์พุตแบบเยื้องศูนย์จะทำให้เสาต้องกว้างขึ้นตามระยะเยื้องศูนย์ ซึ่งมักจะอยู่ที่ 20–40 มม. ซีรี่ส์ VR รักษาเสาให้มีขนาดเท่ากับเส้นผ่านศูนย์กลางของมอเตอร์บวกกับความหนาของผนังเฟืองวงแหวนเพียงไม่กี่มิลลิเมตร ทำให้สามารถออกแบบแกนหมุนและแกนต่างๆ ที่เป็นไปไม่ได้เลยหากใช้ตัวลดเกียร์แบบเยื้องศูนย์
- 2
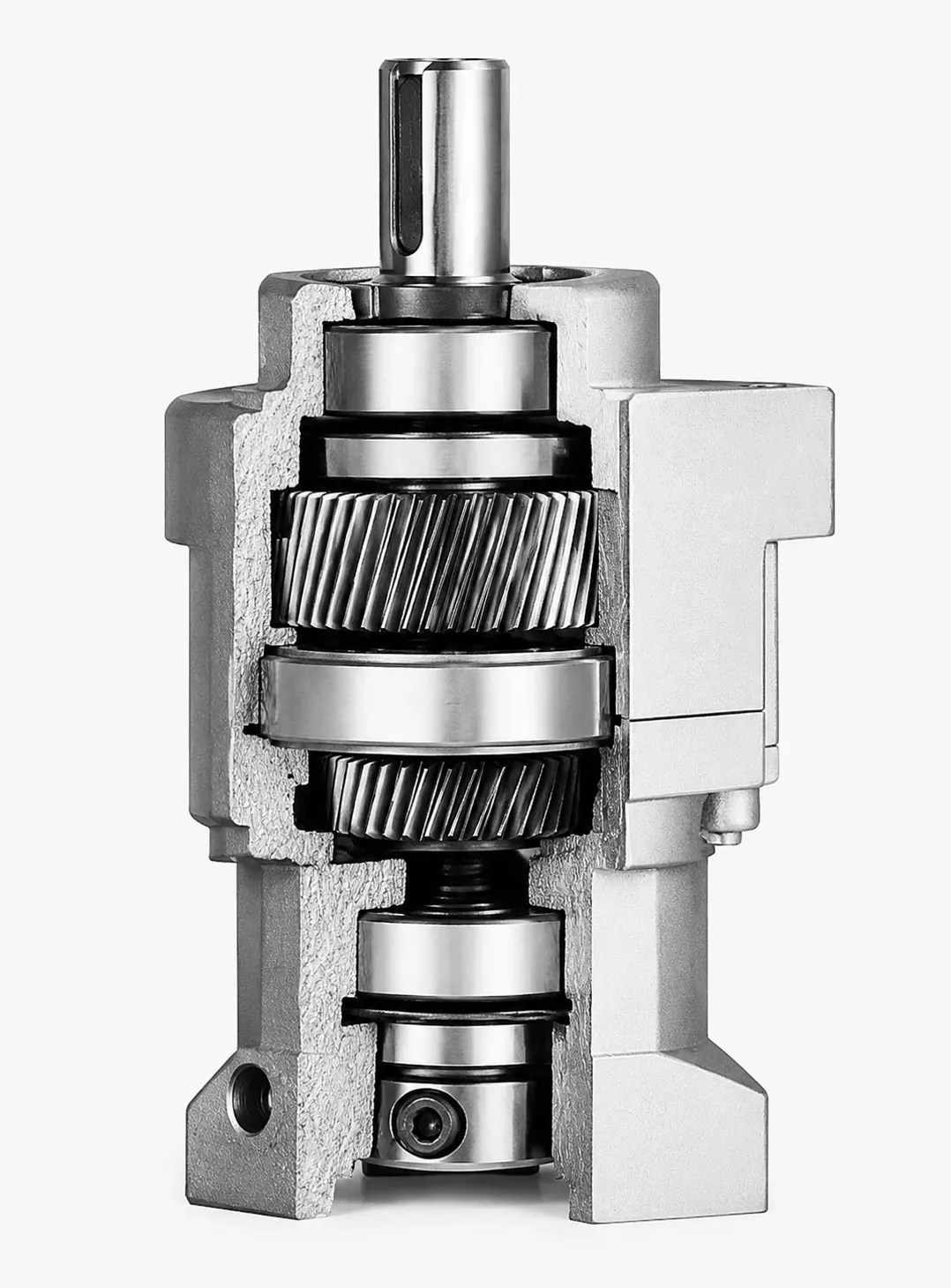
ความแม่นยำและความคลาดเคลื่อนที่เหนือกว่า — การรองรับตลับลูกปืนโดยตรง
เพลาส่งกำลังได้รับการรองรับด้วยแบริ่งบนแกนเดียวกันกับตัวยึดเฟืองดาวเคราะห์ ซึ่งเป็นการจัดเรียงการรองรับแบบแกนเดียวที่ช่วยขจัดโมเมนต์ดัดและการเยื้องศูนย์ของแบริ่งที่เกิดขึ้นในแบบที่มีการเยื้องศูนย์เมื่อเพลาส่งกำลังรับแรงในแนวรัศมี การเบี่ยงเบนในแนวรัศมีของเพลาส่งกำลังในซีรี่ส์ VR โดยทั่วไปจะอยู่ที่ ≤0.005 มม. เทียบกับ ≤0.015–0.020 มม. สำหรับแบบเฟืองดาวเคราะห์ที่มีการเยื้องศูนย์ที่เทียบเท่ากัน ซึ่งส่งผลดีโดยตรงต่อคุณภาพของพื้นผิวในการใช้งานแกนหมุน
- 3
ข้อต่อมอเตอร์แบบ F-Type Zero-Hardware
อินพุตแบบ F-type ที่มีรูกลวงช่วยขจัดส่วนประกอบการเชื่อมต่อออกไปอย่างสิ้นเชิง ซึ่งเป็นชิ้นส่วนแยกต่างหากที่เพิ่มความยาว น้ำหนัก ต้นทุน และทำให้เกิดการคลายตัว (backlash) เพลาของมอเตอร์จะเลื่อนผ่านรูและถูกยึดด้วยแหวนแบบไม่มีลิ่ม ซึ่งให้แรงยึดที่สมมาตรโดยไม่ต้องใช้ร่องลิ่มที่ทำให้เพลาอ่อนแอลง การออกแบบที่ไม่มีการเชื่อมต่อเป็นวิธีเดียวที่จะขจัดปัญหาการคลายตัวที่เกิดจากการเชื่อมต่อออกจากการคลายตัวโดยรวมของระบบ ซึ่งมีความสำคัญเมื่อข้อกำหนดความแม่นยำของเกียร์อยู่ที่ ≤3–5 arcmin และการคลายตัวจากการเชื่อมต่อจะเพิ่มอีก 1–3 arcmin
- 4
สมดุลไดนามิกบนแกนความเร็วสูง
ที่ความเร็วรอบอินพุตสูงกว่า 3,000 รอบต่อนาที ตัวยึดเฟืองดาวเคราะห์แบบเยื้องศูนย์จะสร้างความไม่สมดุลในการหมุนซึ่งเป็นสัดส่วนกับมวลที่เยื้องศูนย์ ณ รัศมีการทำงาน รูปทรงเรขาคณิตของตัวลดเกียร์แบบแกนร่วม (Co-axial VR) จะวางมวลที่หมุนทั้งหมดอย่างสมมาตรเกี่ยวกับแกนร่วม ซึ่งสมดุลโดยธรรมชาติโดยไม่ต้องใช้ตุ้มถ่วง ทำให้สามารถทำงานที่ความเร็วสูงได้อย่างราบรื่นจนถึงความเร็วสูงสุดที่กำหนดโดยไม่มีข้อจำกัดด้านการสั่นสะเทือนซึ่งจะลดช่วงความเร็วที่ใช้งานได้ของตัวลดเกียร์แบบเยื้องศูนย์ในงานแกนหมุน
VR Concentric เทียบกับวิธีการลดความเร็วแบบอื่น
การลดความเร็วรอบแกนร่วมสามารถทำได้ด้วยเทคโนโลยีที่แข่งขันกันหลายแบบ ตารางด้านล่างแสดงให้เห็นว่าเทคโนโลยีชุดเฟืองดาวเคราะห์ VR มีข้อได้เปรียบในด้านใด และโซลูชันทางเลือกอื่นๆ ยังคงมีข้อได้เปรียบที่สมเหตุสมผลในด้านใด

| เกณฑ์ | VR Planetary ★ | สายพาน/รอก | เกลียวอินไลน์ | ฮาร์โมนิกไดรฟ์ |
|---|---|---|---|---|
| เอาต์พุตโคแอกเซียล | ✓ สายโคแอกเซียลแท้ | ต้องใช้ค่าชดเชย | ✓ โคแอกเซียล | ✓ โคแอกเซียล |
| กระแสต่อต้าน | ระดับต่ำ (ระดับความแม่นยำ) | ตัวแปร (การเลื่อนของสายพาน) | ปานกลาง | ใกล้ศูนย์ |
| ความหนาแน่นของแรงบิด | ◉◉◉◉◉ | ◉◉○○○ | ◉◉◉○○ | ◉◉◉◉○ |
| ช่วงอัตราส่วน (หน่วยเดียว) | 3:1 – 81:1 | 1.5:1 – 8:1 | 4:1 – 100:1 | 30:1 – 320:1 |
| การซ่อมบำรุง | ไม่มี — ปิดผนึก | การเปลี่ยนสายพาน | การเปลี่ยนถ่ายน้ำมันเครื่อง | ไม่มี — ปิดผนึก |
| เหมาะสำหรับความเร็วสูง (>3,000 รอบต่อนาที) | ◉◉◉◉◉ | ◉◉○○○ | ◉◉◉○○ | ◉◉○○○ |
| ต้นทุนต่อหน่วย | มาตรฐาน | ต่ำ ✓ | ต่ำ-ปานกลาง | สูง ✗ |
◉ = ประสิทธิภาพเชิงเปรียบเทียบต่อแถว Harmonic Drive เป็นเครื่องหมายการค้าจดทะเบียนของ Harmonic Drive SE และใช้เพื่อการเปรียบเทียบทางวิศวกรรมเท่านั้น
แอปพลิเคชันที่ต้องการการลดความเร็วแบบโคแอกเซียลอย่างแท้จริง
ชุดขับแกนหมุนความแม่นยำสูง
แกนหมุนแบบใช้มอเตอร์สำหรับงานเจาะ PCB, งานกัดฟัน และงานแกะสลักขนาดเล็ก จำเป็นต้องลดความเร็วจากความเร็วพิกัดของมอเตอร์ไปสู่ความเร็วในการตัดที่เหมาะสม โดยไม่ต้องเพิ่มขนาดเส้นผ่านศูนย์กลางของแกนหมุนด้วยตัวลดความเร็วแบบหน้าแปลน VR Frame B และ C ที่มีรูเจาะกลวงแบบ F ช่วยให้ได้เส้นผ่านศูนย์กลางหัวแกนหมุนที่เล็กที่สุดเท่าที่จะเป็นไปได้ — เพลาของมอเตอร์เลื่อนผ่านรูเจาะ และหน้าแปลนเอาต์พุตเชื่อมต่อโดยตรงกับปลายแกนหมุนโดยไม่ต้องใช้อุปกรณ์เชื่อมต่อใดๆ ความคลาดเคลื่อนของการหมุนที่ได้ ≤0.005 มม. จะกำหนดความแม่นยำของตำแหน่งรูในการเจาะ PCB โดยตรง ใช้งานร่วมกับ เพลาขับความแม่นยำสูง ในการกำหนดค่าแกนหมุนแบบยืดระยะได้
ระบบอัตโนมัติในห้องปฏิบัติการและวิทยาศาสตร์
ระบบจัดการของเหลวอัตโนมัติ อุปกรณ์ป้อนตัวอย่างสำหรับเครื่องปั่นเหวี่ยง และกลไกป้อนตัวอย่างสำหรับเครื่องจัดลำดับจีโนม ทำงานในห้องปลอดเชื้อและสภาพแวดล้อมที่ปลอดภัยทางชีวภาพ ซึ่งจำเป็นต้องใช้ชุดขับเคลื่อนขนาดกะทัดรัดพร้อมระบบหล่อลื่นแบบปิดผนึก VR Frame B (50–200 วัตต์) พอดีกับข้อจำกัดด้านขนาดของเครื่องมือห้องปฏิบัติการแบบตั้งโต๊ะ ซึ่งความสูงและเส้นผ่านศูนย์กลางทุกมิลลิเมตรมีผลต่อหลักสรีรศาสตร์และพื้นที่จัดเก็บ การเติมจาระบีแบบปิดผนึกช่วยป้องกันความเสี่ยงจากการปนเปื้อนของสารหล่อลื่นต่อตัวอย่างทางชีวภาพหรือโต๊ะทำงานทางแสงที่มีความแม่นยำสูง
การจัดทำดัชนีแบบหมุนความเร็วสูง
หัวหมุนสำหรับประกอบชิ้นส่วนหลายสถานีและอุปกรณ์ทดสอบ จำเป็นต้องมีการจัดเรียงไดรฟ์แบบแกนร่วม เพื่อรักษาขนาดเส้นผ่านศูนย์กลางของโต๊ะหมุนให้มีขนาดกะทัดรัด และหลีกเลี่ยงมวลเยื้องศูนย์ที่ก่อให้เกิดการสั่นสะเทือนที่ความเร็วในการหมุนสูง สมดุลไดนามิกโดยธรรมชาติของซีรี่ส์ VR ที่ความเร็วอินพุตสูง ช่วยให้รอบการหมุนเร็วกว่าการออกแบบแบบเยื้องศูนย์ที่เทียบเท่ากัน ลดเวลาในการทำงานและเพิ่มปริมาณงานโดยไม่ก่อให้เกิดการสั่นสะเทือนทางกล ระยะหนอนล็อคตัวเอง ให้คงตำแหน่งการพักไว้ระหว่างเหตุการณ์ดัชนี
คู่มืออ้างอิงฉบับย่อสำหรับการสมัคร
- ✦ ชุดขับแกนหมุนแบบมอเตอร์
- ✦ ระบบอัตโนมัติสำหรับห้องปฏิบัติการและวิทยาศาสตร์ชีวภาพ
- ✦ การจัดทำดัชนีแบบหมุนความเร็วสูง
- ✦ แอคทูเอเตอร์เซอร์โวแกนขนาดกะทัดรัด
- ✦ การเจาะและการขึ้นรูปไมโคร PCB
- ✦ ชุดขับเคลื่อนเครื่องกัดฟัน
- ✦ ระบบขับเคลื่อนติดตามกล้องโทรทรรศน์
- ✦ อุปกรณ์ขับจับแผ่นเวเฟอร์เซมิคอนดักเตอร์
- ✦ แกนเครื่องมือวินิจฉัยทางการแพทย์
Wafer Chuck & Stage Drives
การหมุนแกนทีต้าของหัวจับแผ่นเวเฟอร์เซมิคอนดักเตอร์และไดรฟ์สเตจ XY ที่มีความแม่นยำสูง ใช้เฟรม VR B และ C สำหรับการส่งแรงบิดแบบแกนร่วมภายในขีดจำกัดความสูงของชุดประกอบสเตจ จาระบีแบบปิดผนึกช่วยป้องกันการปนเปื้อนของอนุภาคในห้องปลอดเชื้อจากไอระเหยของสารหล่อลื่น ซึ่งจะทำให้ตัวลดเกียร์ที่หล่อลื่นด้วยน้ำมันแบบเดิมใช้งานไม่ได้
ระบบขับเคลื่อนติดตามกล้องโทรทรรศน์
ระบบขับเคลื่อนฐานกล้องโทรทรรศน์แบบอิเควทอเรียลสำหรับมือสมัครเล่นและมืออาชีพ จำเป็นต้องมีการลดแกนร่วมทั้งในแกน RA และ Dec การทำงานที่ปราศจากเสียงรบกวนของซีรีส์ VR ที่ความเร็วในการติดตามดวงดาว (เอาต์พุต 0.0007 รอบต่อนาที) และแรงบิดกระตุกต่ำ ช่วยป้องกันการสั่นสะเทือนแบบไมโครสเต็ปที่ทำให้ภาพถ่ายดาราศาสตร์แบบเปิดรับแสงนานเบลอที่ทางยาวโฟกัสมากกว่า 1,000 มม.
อุปกรณ์วินิจฉัยทางการแพทย์
ชุดขับการหมุนของโครงเครื่องสแกน CT และชุดขับขดลวดไล่ระดับความเข้มแสงของเครื่อง MRI ทำงานในสภาพแวดล้อมที่ไม่สามารถยอมรับการปนเปื้อนของอนุภาคโลหะหรือสารหล่อลื่นได้ การเติมจาระบีแบบปิดผนึก VR และตัวเรือนปิดผนึก IP54 ตรงตามข้อกำหนดการควบคุมการปนเปื้อนของอุปกรณ์ทางการแพทย์โดยไม่ต้องใช้อุปกรณ์หุ้มเพิ่มเติม

การเลือกขนาดกรอบ — B ถึง E
การเลือกเฟรมต้องคำนึงถึงกำลังมอเตอร์ที่เหมาะสม เส้นผ่านศูนย์กลางของตัวเรือน VR จะแปรผันตามขนาดของเฟรม — เลือกเฟรมขนาดเล็กที่สุดที่มีแรงบิดและความเร็วที่ตรงกับความต้องการใช้งานของคุณ เพื่อลดขนาดของเครื่องจักรให้เหลือน้อยที่สุด
หมวด B — เซอร์โวมอเตอร์ขนาดเล็กและอุปกรณ์ขับเคลื่อน (50–200 วัตต์)
เฟรม VR ขนาดเล็กที่สุดสำหรับเครื่องมือห้องปฏิบัติการขนาดกะทัดรัด ระบบอัตโนมัติแบบตั้งโต๊ะ หัวเจาะ PCB และการใช้งานแกนหมุนขนาดเล็ก เส้นผ่านศูนย์กลางของตัวเรือนเฟรม B เป็นขนาดขั้นต่ำที่รองรับชุดเฟืองดาวเคราะห์ได้โดยยังคงความแข็งแรงของโครงสร้างไว้ รูเจาะกลวงแบบ F ช่วยขจัดชิ้นส่วนเชื่อมต่อทั้งหมด ซึ่งเป็นสิ่งสำคัญเมื่อความยาวและเส้นผ่านศูนย์กลางทุกมิลลิเมตรมีความสำคัญ รองรับมอเตอร์สเต็ปเปอร์ 50–100 วัตต์ และมอเตอร์เซอร์โว 50–200 วัตต์
เฟรม C — อุปกรณ์ห้องปฏิบัติการทั่วไปและระบบอัตโนมัติขนาดกะทัดรัด ★ อเนกประสงค์ที่สุด (200–750 วัตต์)
มอเตอร์ตระกูล VR มีช่วงการใช้งานที่กว้างที่สุด ครอบคลุมมอเตอร์เซอร์โวสำหรับระบบอัตโนมัติในห้องปฏิบัติการ หัวหมุนขนาดกะทัดรัด และไดรฟ์แกนหมุนกำลังปานกลาง แรงบิดเอาต์พุตเพียงพอสำหรับแอคทูเอเตอร์ข้อมือแบบหยิบและวาง และแท่นวางแกนทีต้าสำหรับอุตสาหกรรมเซมิคอนดักเตอร์ มีให้เลือกทั้งแบบ S-type และ F-type โดยแบบ F-type เป็นที่นิยมมากกว่าสำหรับขนาดเฟรมนี้ในการออกแบบใหม่
เฟรม D — แกนหมุนอุตสาหกรรมและแกนความแม่นยำ (750–2,200 วัตต์)
ชุดขับแกนหมุน CNC ระดับอุตสาหกรรม ชุดขับหลักของหัวแบ่งตำแหน่งความเร็วสูง และแกนหลักของชุดกัดงานทันตกรรม ทำงานที่กำลังไฟ 750–2,200 วัตต์ โดยมีข้อกำหนดด้านการจัดวางแบบแกนร่วม ซึ่งเฟรม D สามารถรองรับได้ เพลาส่งกำลังที่กว้างขึ้นรับแรงดัดที่สูงขึ้นจากแรงตัดในแนวรัศมีของแกนหมุนโดยไม่เกิดการโก่งงอที่จะส่งผลเสียต่อคุณภาพผิวงานหรืออายุการใช้งานของเครื่องมือ
เฟรม E — ชุดขับแกนร่วมกำลังสูงสุด (2,200–5,000 วัตต์)
ชุดเกียร์เตรียมแกนหมุนอุตสาหกรรมขนาดใหญ่ ชุดขับโต๊ะหมุนกำลังสูง และแอคชูเอเตอร์แกนหลักแบบกล้องโทรทรรศน์ที่มีความแม่นยำสูง ทำงานที่กำลังไฟ 2,200–5,000 วัตต์ โดยการรักษาเรขาคณิตแบบแกนร่วมจะช่วยลดการขยายเฟรมด้านข้างที่จำเป็นต้องทำหากไม่เป็นเช่นนั้น เฟรม E เป็นชุดเฟืองดาวเคราะห์แบบแกนร่วมที่มีกำลังสูงสุดที่มีให้เลือกใช้โดยไม่ต้องเปลี่ยนไปใช้โซลูชันเกียร์แบบกำหนดเอง สเตจเฟืองดอกจอกด้านล่างสามารถเพิ่มแรงบิดเอาต์พุตได้อีกด้วย ไดรฟ์แยกเอาต์พุตหลายตัว ในระบบอัตโนมัติทางอุตสาหกรรม
การรับรองคุณภาพและมาตรฐานความแม่นยำ
การตรวจสอบความเที่ยงตรงของศูนย์กลางเป็นขั้นตอนการทดสอบการยอมรับเพิ่มเติมซึ่งเป็นเอกลักษณ์เฉพาะของซีรี่ส์ VR โดยจะทำการวัดความเบี่ยงเบนของเพลาส่งออกร่วมแกนเทียบกับเส้นศูนย์กลางของรูรับเข้าโดยใช้เครื่องมือวัดพิกัดสามมิติ (CMM) เพื่อยืนยันข้อกล่าวอ้างเกี่ยวกับประสิทธิภาพหลักของการออกแบบก่อนการจัดส่ง
การทดสอบการยอมรับจากโรงงาน — ทุกหน่วย
- ✔ ความเป็นศูนย์กลางร่วมแกน — ค่า TIR จากอินพุตไปยังเอาต์พุต ≤0.005 มม.
- ✔ การวัดระยะคลายตัวต่อเกรด
- ✔ การทดสอบแรงบิดเต็มพิกัดที่ 110%
- ✔ การตรวจสอบความสามารถในการรับแรงบิดของแคลมป์รูแบบ F
- ✔ การทดสอบการซีลกันฝุ่นและน้ำระดับ IP54 — ความแตกต่างของแรงดัน

เหตุใดวิศวกรจึงเลือกใช้ซีรี่ส์ VR
📐
ซองจดหมายเครื่องจักรขั้นต่ำ
รูปทรงแกนร่วมจะเพิ่มความหนาของผนังเฟืองวงแหวนให้กับเส้นผ่านศูนย์กลางของมอเตอร์เท่านั้น ทำให้สามารถออกแบบแกนหมุนและแกนต่างๆ ที่ไม่สามารถทำได้ด้วยตัวลดเกียร์แบบเยื้องศูนย์ในพื้นที่จำกัดของเสาเครื่องจักร
🔩
F-Type ช่วยลดรายการ BOM ของข้อต่อ
การติดตั้งมอเตอร์โดยตรงผ่านรูกลวงช่วยลดชิ้นส่วนข้อต่อออกจากรายการวัสดุ (BOM) ซึ่งช่วยประหยัดต้นทุนต่อหน่วย ขจัดปัญหาการคลายตัวของข้อต่อจากงบประมาณข้อผิดพลาดของระบบ และลดเวลาในการประกอบลง 15-20 นาทีต่อแกน
🎯
ความคลาดเคลื่อนไม่เกิน 0.005 มม. — ตรวจสอบแล้วต่อหน่วย
ตรวจสอบความเที่ยงตรงของแกนร่วมในทุกหน่วยด้วยการวัดโดยใช้เครื่อง CMM ค่า TIR ≤0.005 มม. เป็นการรับประกันสำหรับหน่วยที่จัดส่ง ไม่ใช่ค่าความคลาดเคลื่อนในการออกแบบตามชื่อเรียก ซึ่งมีความสำคัญอย่างยิ่งสำหรับงานแกนหมุนและงานด้านเลนส์ที่มีความแม่นยำสูง
⚡
สมดุลอย่างเป็นธรรมชาติที่ความเร็วสูง
รูปทรงแกนร่วมสมมาตรช่วยขจัดความไม่สมดุลในการหมุนที่ความเร็วอินพุตสูง — ไม่ต้องใช้ตุ้มถ่วง ไม่มีข้อจำกัดด้านการสั่นสะเทือนที่ขึ้นอยู่กับความเร็ว ซึ่งเป็นอุปสรรคต่อช่วงความเร็วในการทำงานที่ใช้งานได้ในงานแกนหมุน
🧬
ปิดผนึกสำหรับห้องปลอดเชื้อและห้องปฏิบัติการชีวภาพ
การไม่มีช่องระบายอากาศภายนอก การปิดผนึกด้วยจาระบี และใบรับรองวัสดุปลอดสาร SVHC ช่วยสนับสนุนการรับรองอุปกรณ์สำหรับโรงงานผลิตเซมิคอนดักเตอร์และห้องปฏิบัติการวิทยาศาสตร์ชีวภาพโดยไม่จำเป็นต้องมีตู้ครอบเพิ่มเติม
🛡️
รับประกัน 2 ปี รับประกันความแม่นยำในการวัดระยะ
รับประกัน 24 เดือน ครอบคลุมความแม่นยำของศูนย์กลาง การคลายตัว ความสมบูรณ์ของแบริ่ง และประสิทธิภาพของซีล ข้อกำหนดการเบี่ยงเบน ≤0.005 มม. ได้รับการรับประกันเป็นลายลักษณ์อักษร ซึ่งไม่ใช่เป้าหมายการออกแบบทั่วไปที่ฝ่ายควบคุมคุณภาพของผู้ผลิตยอมรับให้เกินกว่านั้น
การบูรณาการระบบ: ผลิตภัณฑ์เสริม
ชุดเกียร์โคแอกเซียลซีรีส์ VR เป็นแกนหลักที่มีความแม่นยำสูงของระบบขับเคลื่อนขนาดกะทัดรัด ผลิตภัณฑ์เหล่านี้มักถูกนำไปใช้ร่วมกับซีรีส์ VR ในการออกแบบเครื่องจักรจริง

→ เพลาขับ CV ความแม่นยำสูง
สำหรับโครงสร้างแกนหมุนที่มีระยะการทำงานยาว และระบบขับเคลื่อนกระจกหลักของกล้องโทรทรรศน์ ซึ่งหน้าแปลนเอาต์พุต VR ไม่สามารถอยู่ติดกับจุดรับน้ำหนักได้โดยตรง เพลา CV ที่มีความแม่นยำสูงจะส่งแรงบิดโดยมีค่าความคลาดเคลื่อนไม่เกิน 0.005 มม. ซึ่งช่วยรักษาข้อได้เปรียบด้านความแม่นยำในการจัดศูนย์กลาง ทำให้เพลาซีรีส์ VR เป็นตัวเลือกในการออกแบบที่เหมาะสม
- ▸ ค่าความคลาดเคลื่อน ≤0.005 มม.
- ▸ ความยาว 50–500 มม. สำหรับระบบขนาดกะทัดรัด
→ เกียร์หนอนล็อคตัวเอง
หัวจับชิ้นงานแบบหมุนที่มีข้อกำหนดการยึดตำแหน่งคงที่ ใช้ขั้นตอนลดความเร็วแบบ VR ตามด้วยขั้นตอนเฟืองตัวหนอนสำหรับการล็อคตำแหน่งคงที่โดยอัตโนมัติ ขั้นตอน VR ช่วยลดความเร็วได้อย่างมีประสิทธิภาพ ส่วนเฟืองตัวหนอนจะให้การล็อคเชิงกลที่แข็งแรง ป้องกันไม่ให้โต๊ะเลื่อนขณะรับน้ำหนักในระหว่างการประกอบหรือการทดสอบ
- ▸ อัตราส่วนรวมสูงสุด 6,000:1
- ▸ ระบบล็อคตัวเองช่วยลดความจำเป็นในการใช้ชิ้นส่วนเบรก
→ แท่นตัดขอบแบบหลายเอาต์พุต
ในระบบอัตโนมัติแบบหลายหัวที่ต้องใช้เอาต์พุต VR เพียงตัวเดียวในการจ่ายพลังงานให้กับแกนตั้งฉากสองแกน สเตจปรับมุมเอียงที่อยู่ถัดไปจะแยกเอาต์พุตแบบแกนร่วมไปยังไดรฟ์ปรับมุมฉากสองตัว โดยมีประสิทธิภาพต่อสเตจอยู่ที่ 96–98% ซึ่งช่วยรักษาประสิทธิภาพการใช้พลังงานของระบบ ทำให้ซีรี่ส์ VR มีความคุ้มค่าตลอดอายุการใช้งานของผลิตภัณฑ์
- ▸ ประสิทธิภาพการเจียรขอบ 96–98%
- ▸ การแบ่งพื้นที่แบบกะทัดรัดสำหรับการจัดวางหลายแกนในพื้นที่จำกัด
รีวิวจากลูกค้าและผลการปฏิบัติงานภาคสนาม
5 ★
83%
4 ★
14%
≤3 ★
3%
ชุด VR-F Frame C บนหัวเจาะไมโคร PCB ของเรา รูเจาะกลวงแบบ F ช่วยลดความยาวของชุดแกนหมุนลง 32 มม. เมื่อเทียบกับชุดข้อต่อ + ตัวลดเกียร์มาตรฐานแบบเดิม ซึ่งเป็นระยะเผื่อที่เราต้องการพอดีเพื่อให้หัวเจาะพอดีกับโครงสร้างเครื่อง การเบี่ยงเบนที่วัดได้คือ 0.004 มม. ในทุก 24 ยูนิต ใช้งานมา 18 เดือน ไม่มีข้อบกพร่องใดๆ
เลือกใช้เฟรม VR-S รุ่น B สำหรับหุ่นยนต์จัดการของเหลว 8 แกน ในงานวิจัยด้านจีโนมิกส์ การใช้จาระบีแบบปิดผนึกเป็นข้อกำหนดที่จำเป็นเพื่อความปลอดภัยทางชีวภาพ — ห้ามมีการหล่อลื่นแบบเปิดภายในระยะ 500 มม. จากบริเวณที่จัดการตัวอย่าง เส้นผ่านศูนย์กลางของตัวเรือนเฟรม B พอดีกับโปรไฟล์ข้อต่อแขนขนาด 40 มม. ของเรา ใช้งานอัตโนมัติทุกวันเป็นเวลา 14 เดือนโดยไม่มีปัญหาใดๆ ที่เกี่ยวข้องกับการหล่อลื่น
เฟรม VR-F D สำหรับหัวหมุนกำหนดตำแหน่งความแม่นยำสูงในเครื่องเชื่อมชิ้นส่วนเซมิคอนดักเตอร์ การจัดวางแบบแกนร่วมเป็นทางออกเดียวที่พอดีกับเสาแกน Z ของเครื่องจักร ซึ่งมีเส้นผ่านศูนย์กลางจำกัดเพียง 90 มม. ทำให้ไม่จำเป็นต้องใช้ตัวลดระยะออฟเซ็ต เวลาในการหมุนกำหนดตำแหน่งดีขึ้น 18% เมื่อเทียบกับการจัดเรียงแบบสายพานและรอกแบบเดิม เนื่องจากไม่มีการยืดหยุ่นของสายพานที่ความเร่งสูง ใช้งานมาสองปีโดยไม่ต้องบำรุงรักษา
ขาตั้งกล้อง VR-S Frame C บนแกน RA ของกล้องโทรทรรศน์ดาราศาสตร์ของเรา รูปทรงแบบแกนร่วมช่วยให้เส้นผ่านศูนย์กลางของหัวขาตั้งกล้องกะทัดรัด แรงบิดต่ำช่วยขจัดข้อผิดพลาดในการขับเคลื่อนเป็นระยะที่ทำให้ภาพถ่ายแบบเปิดรับแสงนานที่ f/10 เบลอ ไม่พบการสั่นสะเทือนใด ๆ ในการเปิดรับแสง 5 นาทีที่ทางยาวโฟกัส 1,200 มม. หมายเหตุเล็กน้อย: ระยะเวลารอคอยนานกว่ารุ่นมาตรฐาน — สั่งซื้อล่วงหน้าหากเวลาในการจัดส่งมีความสำคัญ
คำถามที่พบบ่อย
ข้อมูลเพิ่มเติม
| บรรณาธิการ | ซีเอ็กซ์เอ็ม |
|---|
ผลิตภัณฑ์ที่เกี่ยวข้อง
-

เกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูง รุ่น EP-ABR Series (EP-ABR042 ถึง EP-ABR220)
-

ชุดเกียร์แพลเนตารีแบบอินไลน์พร้อมเพลาส่งกำลังความแข็งแกร่งสูง รุ่น EP-AF (EP-AF042 ถึง EP-AF220 และรุ่น EP-AFX)
-

เกียร์ทดรอบแบบอินไลน์แพลเนตารีหน้าแปลนขนาดใหญ่ รุ่น EP-AE
-

เกียร์ทดรอบแบบดาวเคราะห์ความแม่นยำสูง รุ่น EP-AD (EP-AD047 ถึง EP-AD255)
-

ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูง BABR ซีรีส์ — แบบหน้าแปลนกลม (EP-BABR042 ถึง EP-BABR220)
-

ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูง รุ่น BAB — หน้าแปลนมาตรฐาน (EP-BAB042 ถึง EP-BAB220)
-

ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์มุมฉากมาตรฐานสำหรับอุตสาหกรรมทั่วไป — ซีรีส์ WPL (WPL40–WPL120)
-

เกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูงซีรีส์ VR สำหรับระบบส่งกำลังแบบโซ่


























