Concentric Precision Planetary Gearbox for High-Speed Servo — VR Series

The VR Series concentric precision planetary gearbox is designed for high-speed servo motor integration where inline co-axial output is required and backlash must be minimised for tight closed-loop position control. Available in S-type (solid input shaft) and F-type (hollow-bore input shaft) configurations, four frame sizes — B, C, D, and E — cover servo motor compatibility from 50 W up to 5,000 W with gear ratios from 3:1 up to 81:1. The co-axial input-output arrangement achieves exceptional concentricity and minimal radial runout, making VR series the preferred specification for high-speed spindle drives, precision rotary indexing heads, laboratory automation, and any application where motor and load share a common centreline axis and where frame compactness directly limits machine envelope dimensions.
Concentric Planetary Gearbox — Co-Axial Precision for Compact Servo Drives
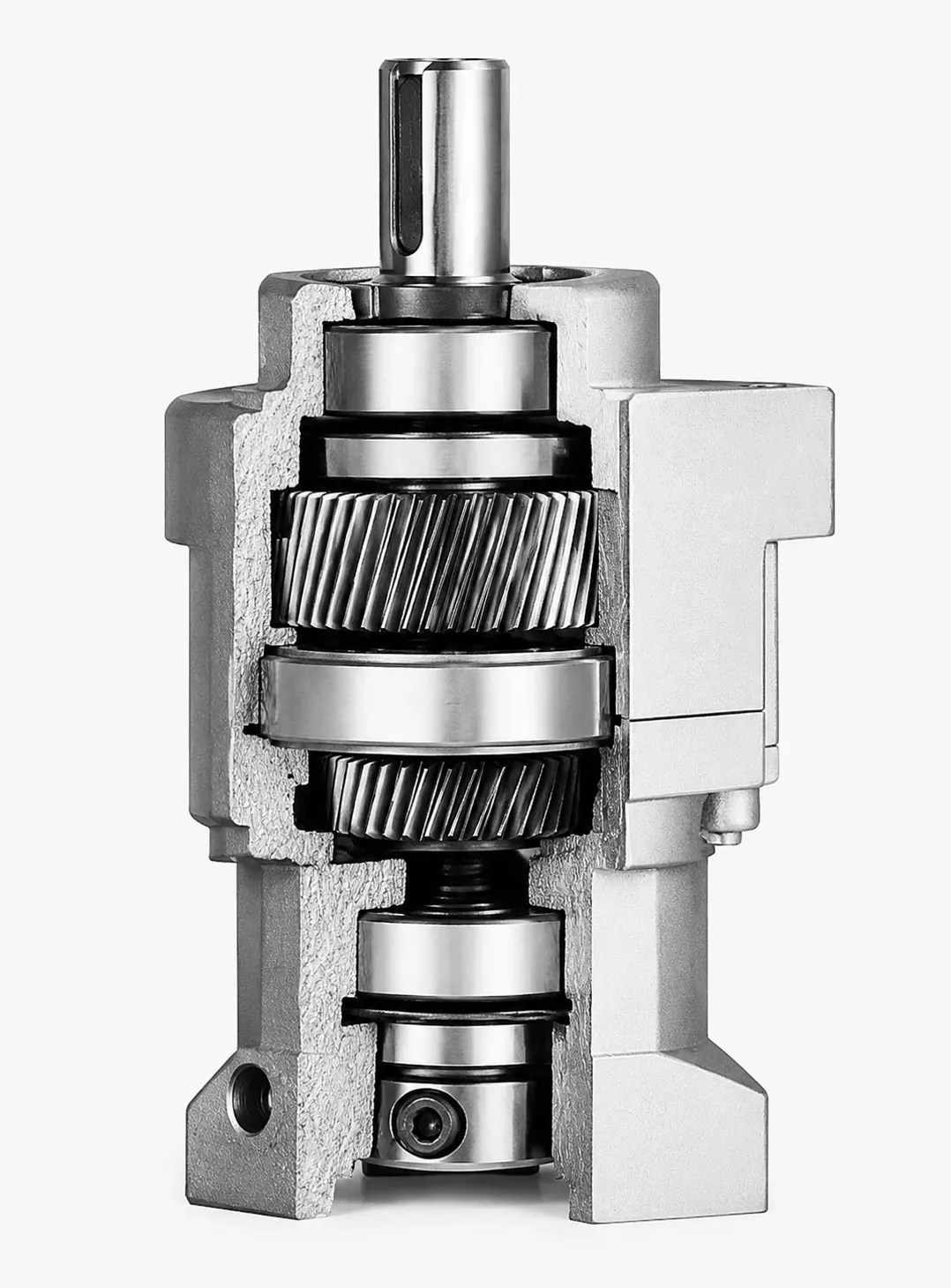
The VR series concentric planetary gearbox solves a specific integration problem that flange-output reducers cannot: applications where the driven shaft must be co-axial with the motor shaft, the machine envelope prohibits any lateral offset between motor and load, and the speed reduction must be achieved without right-angle or offset gear stages that add length, weight, and backlash. The VR's inline co-axial output keeps motor and load on the same centreline axis — motor shaft in, reduced output shaft out on the same axis — in a housing diameter that adds only the planetary ring gear wall thickness to the motor's own frame diameter.
Two input configurations address the full range of motor coupling scenarios: S-type (solid input shaft) for direct coupling via bellows or jaw couplings to standard motor shafts, and F-type (hollow bore input) for direct motor shaft through-mounting that eliminates the coupling hardware entirely — reducing backlash contribution, cutting assembly time, and minimising overall system length. Frame sizes B through E cover servo motor compatibility from 50 W to 5,000 W with gear ratios spanning 3:1 to 81:1.
Technical Specifications — Frames B through E, S & F Input Types
S-type and F-type variants share identical external dimensions and output flanges within each frame size. The difference is solely the input coupling method — choose S-type when you need a separate coupling component, F-type when direct motor shaft through-mounting fits your assembly process.
VR-S Type — Solid Input Shaft
- ▸ Input shaft keyed for coupling attachment
- ▸ Compatible with any motor via bellows or jaw coupling
- ▸ Accommodates shaft misalignment via coupling selection
- ▸ Suitable for motor replacement without gearbox removal
- ▸ Best for: lab automation, test equipment, general servo
VR-F Type — Hollow Bore Input ★ Most Specified
- ▸ Motor shaft passes through bore — zero coupling hardware
- ▸ Minimum system axial length — motor flange butts directly to gearbox
- ▸ Zero coupling backlash contribution to total system backlash
- ▸ Keyless clamping ring secures motor shaft without key slots
- ▸ Best for: spindle drives, high-speed indexing, space-critical designs
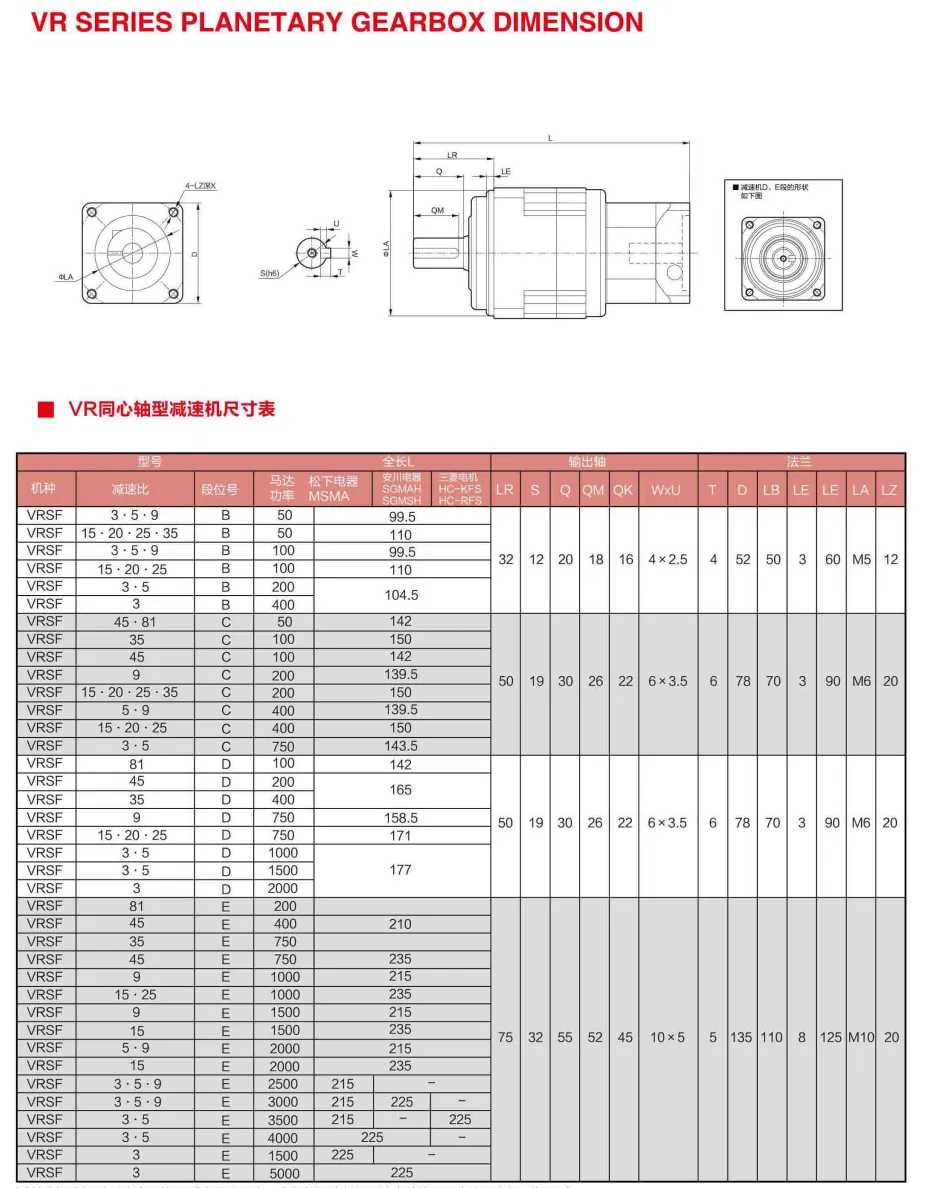
| Parameter | Frame B | Frame C | Frame D | Frame E |
|---|---|---|---|---|
| Compatible Motor Power | 50–200 W | 200–750 W | 750–2,200 W | 2,200–5,000 W |
| Gear Ratio Range | 3 : 1 — 81 : 1 (all frames) | |||
| Input Types Available | S-type (solid shaft) · F-type (hollow bore) — both in all frames | |||
| Output Configuration | Co-axial inline — input and output on same centreline | |||
| Operating Temperature | −25 °C to +90 °C | |||
| Protection Class | IP54 standard · IP65 available on request | |||
| Lubrication | Lifetime sealed grease — maintenance-free | |||
| Service Life | 30,000 hours at rated load | |||
| Mounting Orientation | Any direction | |||
Choose F-type hollow bore when motor shaft diameter matches available bore sizes and minimum axial length is the design priority. Choose S-type solid shaft when motor shaft diameter varies or when motor replacement without gearbox disassembly is required for maintenance access.
Why Co-Axial Geometry Outperforms Offset Reducers in Space-Critical Drives
Most planetary gearboxes use a flange output arrangement where the output shaft protrudes from the front face of the housing — offset from the motor shaft by the planet carrier and ring gear assembly diameter. This geometry requires the machine designer to accommodate two parallel shaft centrelines separated by the ring gear wall thickness. In spindle drives, rotary indexing heads, and laboratory automation where the machine column or chassis dimension is tightly constrained, this offset creates a design conflict that forces either machine re-layout or a larger-than-necessary housing. VR series eliminates the offset entirely.
Four Engineering Advantages of True Co-Axial Output
- 1
Minimum Machine Envelope — No Centreline Offset
The VR housing diameter adds only the planetary gear train radial thickness to the motor frame diameter. In a 60 mm diameter column design, a standard planetary reducer with offset output requires the column to widen by the offset distance — often 20–40 mm. VR series keeps the column at motor diameter plus a few millimetres of ring gear wall, enabling spindle and axis designs that are literally impossible with offset reducers.
- 2
Superior Concentricity and Runout — Direct Bearing Support
The output shaft is supported by bearings on the same axis as the planet carrier — a single-axis support arrangement that eliminates the bending moment and bearing misalignment that occur in offset designs when the output shaft carries radial load. Output shaft radial runout on VR series is typically ≤0.005 mm, versus ≤0.015–0.020 mm for equivalent offset planetary designs, directly benefiting surface finish quality in spindle applications.
- 3
F-Type Zero-Hardware Motor Coupling
The hollow-bore F-type input eliminates the coupling component entirely — a separate item that adds length, weight, cost, and its own backlash contribution. The motor shaft slides through the bore and is clamped by a keyless ring that applies symmetric clamping force without shaft-weakening keyways. A zero-coupling design is the only way to eliminate coupling-induced backlash from the total system backlash budget — important when the gearbox precision specification is ≤3–5 arcmin and coupling backlash would add another 1–3 arcmin.
- 4
Dynamic Balance on High-Speed Axes
At input speeds above 3,000 rpm, offset planetary carriers create a rotating imbalance proportional to the offset mass at the operating radius. Co-axial VR geometry places all rotating mass symmetrically about the common axis — inherently balanced without counterweights. This enables clean high-speed operation to the rated maximum without vibration limits that reduce the usable speed range of offset reducers in spindle applications.
VR Concentric vs Alternative Speed Reduction Methods
Co-axial speed reduction can be achieved by several competing technologies. The table below shows where VR planetary series wins, and where alternative solutions retain a legitimate advantage.

| Criterion | VR Planetary ★ | Belt / Pulley | Inline Helical | Harmonic Drive |
|---|---|---|---|---|
| Co-axial output | ✓ True co-axial | Requires offset | ✓ Co-axial | ✓ Co-axial |
| Backlash | Low (precision grade) | Variable (belt creep) | Moderate | Near-zero |
| Torque density | ◉◉◉◉◉ | ◉◉○○○ | ◉◉◉○○ | ◉◉◉◉○ |
| Ratio range (single unit) | 3:1 – 81:1 | 1.5:1 – 8:1 | 4:1 – 100:1 | 30:1 – 320:1 |
| Maintenance | None — sealed | Belt replacement | Oil changes | None — sealed |
| High-speed suitability (>3,000 rpm) | ◉◉◉◉◉ | ◉◉○○○ | ◉◉◉○○ | ◉◉○○○ |
| Unit cost | Standard | Low ✓ | Low-Medium | High ✗ |
◉ = relative performance per row. Harmonic Drive is a registered trademark of Harmonic Drive SE and referenced for engineering comparison only.
Applications Requiring True Co-Axial Speed Reduction
Precision Spindle Drives
Motorised spindles for PCB drilling, dental milling, and micro-engraving require speed reduction from motor rated speed to the optimal cutting speed without the lateral bulk that flange-output reducers add to the spindle column diameter. VR Frame B and C with F-type hollow bore achieve the minimum possible spindle-head diameter — the motor shaft slides through the bore and the output flange couples directly to the spindle nose without any coupling hardware between them. The resulting ≤0.005 mm runout directly determines hole positional accuracy in PCB drilling operations. Pairs with precision drive shafts on extended-reach spindle configurations.
Laboratory & Scientific Automation
Automated liquid handling systems, centrifuge loaders, and genomic sequencer feed mechanisms operate in cleanroom and bio-safe environments where compact drive units with sealed lubrication are mandatory. VR Frame B (50–200 W) fits within the dimensional constraints of benchtop laboratory instruments where every millimetre of height and diameter affects ergonomics and cabinet footprint. The sealed grease fill prevents any risk of lubricant contamination to biological samples or precision optical benches.
High-Speed Rotary Indexing
Rotary indexing heads for multi-station assembly and test fixtures require co-axial drive arrangement to keep the indexing table diameter compact and avoid eccentric masses that generate vibration at high indexing speeds. VR series inherent dynamic balance at high input speeds enables faster indexing cycles than equivalent offset designs — reducing cycle time and increasing throughput without mechanical vibration excitation. Downstream self-locking worm stages provide dwell-position holding between index events.
Application Quick Reference
- ✦ Motorised Spindle Drives
- ✦ Laboratory & Life Science Automation
- ✦ High-Speed Rotary Indexing
- ✦ Compact Servo Axis Actuators
- ✦ PCB Drilling & Micro-Machining
- ✦ Dental Milling Unit Drives
- ✦ Telescope Tracking Drives
- ✦ Semiconductor Wafer Chuck Drives
- ✦ Medical Diagnostic Instrument Axes
Wafer Chuck & Stage Drives
Semiconductor wafer chuck theta-axis rotation and precision X-Y stage drives use VR Frame B and C for co-axial torque delivery within the stage assembly height limit. Sealed grease prevents cleanroom particle contamination from lubricant vapour that would disqualify conventional oil-lubricated reducers.
Telescope Tracking Drives
Amateur and professional telescope equatorial mount drives require co-axial reduction on both RA and Dec axes. VR series noise-free operation at sidereal tracking speeds (0.0007 rpm output) and low cogging torque prevents the micro-step vibration that blurs long-exposure astrophotography images at focal lengths above 1,000 mm.
Medical Diagnostic Equipment
CT scanner gantry rotation drives and MRI gradient coil actuators operate in environments where any metallic particle or lubricant contamination is unacceptable. VR sealed grease fill and IP54 sealed housing meet medical device contamination control requirements without additional enclosure hardware.

Frame Size Selection — B through E
Frame selection follows motor power compatibility. The VR housing diameter scales with frame size — select the smallest frame whose torque and speed rating covers your application requirement to minimise machine envelope.
Frame B — Miniature Servo & Instrument Drives (50–200 W)
Smallest VR frame for compact laboratory instruments, benchtop automation, PCB drill heads, and miniature spindle applications. The Frame B housing diameter is the minimum that accommodates the planetary gear train while maintaining structural rigidity. F-type hollow bore eliminates all coupling hardware — critical when every millimetre of length and diameter matters. Covers stepper motors 50–100 W and servo motors 50–200 W.
Frame C — General Lab & Compact Automation ★ Most Versatile (200–750 W)
The widest application range in the VR family — covers the majority of laboratory automation servo motors, compact rotary index heads, and medium-power spindle drives. Sufficient output torque for pick-and-place wrist actuators and semiconductor theta-axis stages. Available in both S-type and F-type; F-type is by far the more common selection at this frame size for new designs.
Frame D — Industrial Spindle & Precision Axis (750–2,200 W)
Industrial CNC spindle pre-drives, high-speed indexing head main drives, and dental milling unit main axes operate at 750–2,200 W with co-axial layout requirements that Frame D handles. Wider output shaft accepts higher bending loads from spindle radial cutting forces without deflection that would compromise surface finish or tool life.
Frame E — Maximum Power Co-Axial Drive (2,200–5,000 W)
Large industrial spindle pre-stage gearboxes, high-power rotary table drives, and precision telescope primary axis actuators operate at 2,200–5,000 W where maintaining co-axial geometry eliminates the lateral frame extension that would otherwise be required. Frame E is the highest-power co-axial planetary combination available without moving to custom gearbox solutions. Downstream bevel stages can further multiply output torque for multi-output drive splits in industrial automation systems.
Quality Certifications & Precision Standards
Concentricity verification is an additional acceptance test step unique to VR series — the co-axial output shaft is measured for runout relative to the input bore centreline using a CMM fixture, verifying the core performance claim of the design before shipment.
Factory Acceptance Tests — Every Unit
- ✔ Co-axial concentricity — input to output ≤0.005 mm TIR
- ✔ Backlash measurement per grade
- ✔ Full-load torque test at 110% rated
- ✔ F-type bore clamp torque capacity verification
- ✔ IP54 ingress seal test — pressure differential

Why Engineers Choose VR Series
📐
Minimum Machine Envelope
Co-axial geometry adds only ring gear wall thickness to motor diameter — enabling spindle and axis designs that are geometrically impossible with offset-output reducers in space-constrained machine columns.
🔩
F-Type Eliminates Coupling BOM Item
Hollow bore direct motor mounting removes a coupling component from the BOM — saving unit cost, eliminating coupling backlash from the system error budget, and reducing assembly time by 15–20 minutes per axis.
🎯
≤0.005 mm Runout — Verified Per Unit
Co-axial concentricity verified on every unit by CMM fixture measurement. The ≤0.005 mm TIR figure is a shipped-unit guarantee, not a nominal design tolerance — critical for spindle and precision optics applications.
⚡
Inherently Balanced at High Speed
Symmetric co-axial geometry eliminates rotating imbalance at high input speeds — no counterweights, no speed-dependent vibration ceiling that limits usable operating speed range in spindle applications.
🧬
Sealed for Cleanroom & Biolab
Zero external vents, sealed grease fill, and SVHC-free material certificates support semiconductor fab and life-science laboratory equipment qualification without additional enclosure requirements.
🛡️
2-Year Warranty, Runout Spec Guaranteed
24-month warranty covering concentricity, backlash, bearing integrity, and seal performance. The ≤0.005 mm runout specification is warranted in writing — not a typical design target that vendor QC tolerates exceeding.
System Integration: Complementary Products
VR series co-axial gearboxes form the precision core of compact drive systems. These products integrate most frequently alongside VR series in real-world machine designs.

→ Precision CV Drive Shafts
For extended-reach spindle configurations and telescope primary mirror drives where the VR output flange cannot be directly adjacent to the load bearing, precision CV shafts transmit torque with ≤0.005 mm runout contribution — preserving the concentricity advantage that makes VR series the design choice.
- ▸ Runout contribution ≤0.005 mm
- ▸ Lengths 50–500 mm for compact systems
→ Self-Locking Worm Gearbox
Rotary indexing heads with dwell-position holding requirements use a VR pre-stage for speed reduction followed by a worm stage for self-locking dwell. The VR handles the speed reduction efficiently; the worm provides the positive mechanical lock that prevents table creep under load during assembly or test operations.
- ▸ Combined ratios to 6,000:1
- ▸ Self-locking eliminates brake hardware
→ Multi-Output Bevel Stage
Where a single VR output must power two perpendicular axes in a multi-head automation system, a bevel stage downstream splits the co-axial output to two right-angle drives at 96–98% per-stage efficiency — maintaining the system energy efficiency that makes VR series cost-effective over the product lifecycle.
- ▸ Bevel efficiency 96–98%
- ▸ Compact split for tight multi-axis layouts
Customer Reviews & Field Performance
5 ★
83%
4 ★
14%
≤3 ★
3%
VR-F Frame C units on our PCB micro-drill heads. The F-type hollow bore reduced our spindle assembly length by 32 mm compared to the previous coupling + standard reducer combination — which was exactly the margin we needed to fit the drill head inside the machine gantry profile. Runout measured at 0.004 mm on all 24 units. 18 months operation, zero failures.
Specified VR-S Frame B across 8 axes of a liquid handling robot for genomics research. The sealed grease was a mandatory requirement for biosafety compliance — no open lubrication within 500 mm of sample handling zones. The Frame B housing diameter fit perfectly within our 40 mm arm link profile. 14 months of daily automated operation with no lubrication-related incidents.
VR-F Frame D for a precision rotary indexing head in a semiconductor die-bonding machine. The co-axial layout was the only solution that fit within the machine's Z-axis column — a 90 mm diameter constraint that eliminated all offset reducers. Indexing cycle time improved 18% versus the previous belt-and-pulley arrangement due to the elimination of belt compliance at high acceleration. Two years operation, zero maintenance.
VR-S Frame C on our astronomical telescope RA axis. The co-axial geometry kept the mount head diameter compact; the low cogging torque eliminated the periodic drive error that was blurring long-exposure images at f/10. No vibration detectable at 5-minute exposures at 1,200 mm focal length. Minor note: longer lead time than standard series — order ahead if delivery timing matters.
Frequently Asked Questions
Additional information
| Editor | Cxm |
|---|
Related products
-

EP-AD Series Round Circular Flange High-Precision Inline Planetary Gearbox (EP-AD047 to EP-AD255)
-

EP-AB Series Standard Square Flange High-Precision Inline Planetary Gearbox (EP-AB042 to EP-AB220)
-

EP-BPG Series Energy-Saving Planetary Gearbox — Standard Industrial Drive (EP-BPG040 to EP-BPG160)
-

EP-BAF Series High-Precision Planetary Gearbox — High-Rigidity Output Shaft (EP-BAF042 to EP-BAF220)
-

BADR Series Right-Angle High-Precision Planetary Gearbox — Round Flange (EP-BADR047 to EP-BADR255)
-

High-Precision Compact Planetary Gearbox for Servo Integration — PLS Series (PLS70–PLS190)
-

Helical Planetary Gearbox for High-Power Continuous Drives — PZB Series (60–220PZB)
-

PLS Precision Planetary Gearbox for Industrial Chain Drives


























