EP-ZDWEシリーズ直角入力精密遊星歯車装置

EP-ZDWEシリーズは、90°ベベル入力段と円形フランジ出力を備えた直角入力精密遊星歯車減速機で、EP-ZDWE-60からEP-ZDWE-160までの4つのフレームサイズが用意されています。定格出力トルクは12 N·mから800 N·mまでで、バックラッシュは25~30分角未満、単段効率は94%です。90°ベベル入力によりサーボモータが出力軸軸に対して垂直に配置されるため、インラインEP-ZDEと比較して軸方向の設置全長が30~50%短縮されます。そのため、EP-ZDWEは韓国の小型工作機械の主軸台、ロボットジョイント、スペース制約のあるサーボアクチュエータ設計に最適な直角精密遊星歯車減速機となっています。減速比は3:1から512:1までで、潤滑油は寿命まで不要で、保護等級はIP54です。
EP-ZDWEシリーズ - 直角入力精密遊星歯車装置 | 丸フランジ、30~50%軸方向省スペース、最大800 N·m
EP-ZDWEは、内部ベベルギア段を介してサーボモーターを出力軸に対して90°の位置に配置し、インライン方式と比較してモーター+ギアボックスアセンブリの全長を30~50%短縮します。 EP-ZDE遊星歯車装置出力は 丸型(円形)取付フランジ — 出力側設置の場合は EP-ZDE と同一です。角フランジ直角バージョンについては、以下を参照してください。 EP-ZDWFシリーズ.
の EP-ZDWEシリーズ直角入力精密遊星歯車装置 韓国のEver-Power社は、韓国のサーボドライブ設計における最も一般的な空間的制約、すなわちモータ軸と出力軸を同軸にできないという問題を解決します。出力軸の後ろの奥行きが限られているコンパクトな工作機械の主軸台、ロボットの手首関節、狭幅コンベア駆動装置、多軸ガントリーシステムなどにおいて、EP-ZDWEはモータを出力軸に対して垂直(左右または上下)に配置することで、インラインモータが占有するはずだった軸方向の空間を有効活用します。
ベベル入力段は、インラインEP-ZDEと比較してギアのかみ合いを1つ追加し、単段効率を96%(EP-ZDE)から低下させる。 94% これは、韓国の機械設計者が設置面積の縮小と引き換えに喜んで受け入れる些細なトレードオフです。出力軸、丸型フランジ、ベアリング配置、長寿命潤滑、IP54シールは、同じフレームサイズのEP-ZDEと同一であるため、出力側の設置はそのまま流用できます。
90°ベベル入力 ― 軸方向スペースを節約する方法と使用すべきタイミング

インライン入力(EP-ZDE)— 全長
[====モーター====][===ZDE===]──▶ 出力
全深度 = モーター + L1
例:80フレーム1段式:
モーター 約120 mm + L1 144 mm
= 約264 mmの軸方向深さ
直角入力(EP-ZDWE)—軸方向節約
↓ 90°面取り
[=====ZDWE=====]──▶ 出力
全深度 = ギアボックスL1のみ
例:80フレーム1段式:
L1 184.5 mm 軸方向深さのみ
モーターが横向きに出てくる → 無事!
EP-ZDWEが最適な選択肢となる3つのエンジニアリング事例
① 機械の筐体には出力部の背後に奥行き制限があるため、モーターをインラインで取り付けることはできません。
韓国製の小型マシニングセンタの主軸台、ダイヤルインデックス式工作機械の回転軸ユニット、狭幅コンベヤ駆動装置などは、ギアボックス出力フランジ後方の奥行きに構造上の制約があることが多い。1kWサーボモーターを搭載した80フレームのインラインEP-ZDEでは、モーターとギアボックスのアセンブリの合計奥行きが260~290mmに達し、機械コラムまたはアームセクションの利用可能なスペースを超えてしまう。同じモーターを搭載したEP-ZDWE-80では、モーターが機械セクションの利用可能な幅内に横方向に伸びることで、軸方向の奥行きがギアボックスの長さ(184.5mm、1段)のみにまで縮小される。この軸方向の奥行き縮小は、韓国の工作機械設計者にとって、コンパクトなシングルコラム設計と、より幅広で重量のあるデュアルコラム構造のどちらを選択するかの決定要因となることが多い。
② ロボットアームの断面形状により、インラインモーターの配置が制限される
韓国の協働ロボットおよび産業用ロボットの手首関節の設計者は、根本的なジレンマに直面しています。関節は、6 kg のペイロードを持つロボットの場合、ロボットアームの外径 (通常 60 ~ 100 mm) 内に収まりながら、大きなトルク (手首で通常 20 ~ 80 N·m) を伝達する必要があります。このトルクレベルでインライン モーター + 遊星歯車機構の組み合わせを使用すると、ロボットのリンク長が大幅に長くなり、ロボットの作業空間範囲と動的バランスに影響します。EP-ZDWE は、モーターを関節軸に対して垂直に配置することで、ロボットの手首の外径をモーターと歯車機構の深さの合計ではなく、歯車機構本体の直径 (Φ60 ~ Φ80 mm) で制御できるようにします。水原と城南にある韓国の協働ロボットメーカーは、EP-ZDWE-60 と EP-ZDWE-80 により、インライン モーター構成と比較してリンク長を 80 ~ 120 mm 短縮できる手首関節設計が可能になったと報告しています。
③ 多軸ガントリーシステム ― 重心最適化のための並列モータ配置
韓国製の高速レーザー切断およびピックアンドプレースガントリーシステムは、単一のコンパクトなキャリッジアセンブリからX、Y、Z軸を駆動しますが、EP-ZDWEを採用することで、3つのサーボモーターすべてをキャリッジの移動方向と平行に配置できます。つまり、モーターは前方や後方ではなく、横方向に向けられます。これにより、モーターの質量がキャリッジの重心付近に集中し、モーターの慣性モーメントアームが小さくなり、高加速度での位置決め精度が向上します。150m/分以上の送り速度を持つ韓国製レーザー切断システムでは、モーターを直角に配置することで重心が改善され、モーターの質量がキャリッジの突き出し部分を延長するインライン構成と比較して、方向転換時の軌道誤差が大幅に低減されます。
EP-ZDWEとEP-ZDEの比較 ― 直角入力とインライン入力の選択
| 基準 | EP-ZDE — インライン入力 | EP-ZDWE — 直角入力 ★ |
|---|---|---|
| モーター出力方向 | 同軸型 - 出力軸と一直線上にモーターが配置されている | 90° — モーターが出力軸に対して垂直。 |
| 軸方向設置深さ全体 | モーターの長さ + ギアボックスL1(例:80フレームの場合約264mm) | ギアボックスL1のみ(例:80フレームの場合は184.5mm)— 30-50%短縮 |
| 単段効率 | 96% — ベベルステージ損失なし | 94% — ベベルステージで約2%の損失が発生 |
| 利用可能なフレームサイズ | 40 / 60 / 80 / 120 / 160 mm(5サイズ) | 60 / 80 / 120 / 160 mm(4サイズ展開 - 40 mmフレームはありません) |
| 出力フランジとシャフト | 同一仕様 - 丸型フランジD7、シャフトD4h7、フレームごとのトルク定格は同じ | |
| 潤滑/IP/温度 | 同一仕様 - 長寿命シールグリース · IP54 · -25℃~+90℃ · あらゆる向きに対応 | |
| 選択するタイミング… | 軸方向のスペースは十分。効率性を最優先。最小フレーム(40mm)が必要。 | 軸方向の奥行きに制限がある。モーターの方向の柔軟性が必要。コンパクトなアーム/ヘッドストック設計。 |
EP-ZDWEシリーズ — 技術仕様詳細
① 定格出力トルク(N・m)— 全フレームサイズおよび全ギア比
| 比率 | ステージ | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| 3:1 | 1 | 12 | 40 | 80 | 400 |
| 4:1 | 1 | 16 | 50 | 110 | 450 |
| 5:1 | 1 | 16 | 50 | 110 | 450 |
| 8:1 | 1 | 15 | 45 | 100 | 400 |
| 10:1 | 1 | 12 | 40 | 80 | 305 |
| 9:1 | 2 | 40 | 100 | 210 | — |
| 12:1 | 2 | 40 | 100 | 210 | 700 |
| 16:1 | 2 | 44 | 120 | 260 | 800 |
| 20:1 | 2 | 44 | 120 | 260 | 800 |
| 25:1 | 2 | 40 | 110 | 230 | 700 |
| 32:1 | 2 | 44 | 120 | 260 | 800 |
| 40:1 | 2 | 40 | 110 | 230 | 700 |
| 64:1 | 2 | 40 | 100 | 210 | 700 |
| 60–512:1 | 3 | 40~44 | 100~120 | 210~260 | — |
② 積載量、効率、重量、速度
| パラメータ | ユニット | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| 最大半径方向力 | 北 | 450 | 900 | 2,100 | 6,000 |
| 最大軸方向力 | 北 | 225 | 450 | 1,050 | 3,000 |
| 効率性 — 1段階 | % | 94 (インラインEP-ZDE用96%との比較 - ベベルステージ) | |||
| 効率性 — 2段階 | % | 92 | |||
| 効率性 — 3段階 | % | 88 | |||
| 重量 - 1段階 | kg | 1.7 | 4.4 | 12 | 36 |
| 重量 - 2段階 | kg | 1.9 | 5 | 14 | 40 |
| 重量 - 3段階 | kg | 2.1 | 5.5 | 16 | — |
| ねじり剛性 - 1段階 | N・m/arcmin | 1.5 | 4.5 | 10 | 38 |
| ねじり剛性 - 2段階 | N・m/arcmin | 2.5 | 6.5 | 13 | 43 |
| 騒音(アイドリング時、3,000rpm時) | dB(A) | 65 | 68 | 70 | 70 |
| 最大入力速度 | 回転数 | 4,500 | |||
| 推奨入力速度 | 回転数 | 3,000 | |||
③ フレーム&ステージによるバックラッシュ
| ステージ | ユニット | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| バックラッシュ - 1段階 | アークスミン | 30歳未満 | 25歳未満 | 25歳未満 | 25歳未満 |
| バックラッシュ - 2段階 | アークスミン | 35歳未満 | 30歳未満 | 30歳未満 | 30歳未満 |
| バックラッシュ - 3段階 | アークスミン | 40歳未満 | 35歳未満 | 35歳未満 | — |
④ 一般仕様
| パラメータ | 仕様 |
|---|---|
| 動作温度 | −25℃~+90℃ |
| 保護等級 | IP54(IEC 60529)—防塵、あらゆる方向からの飛沫に対する保護 |
| 潤滑 | 生涯潤滑済み - 工場出荷時に密封されているため、再グリスアップは不要です。 |
| 取り付け方向 | 水平、垂直、逆さま、あらゆる傾斜角度 |
| モーター入力方向 | 4つの位置 ― 左、右、上、下(出力軸に対して90°、注文時に指定してください) |
| 入力軸クランプタイプ | S: 一体型ロック(デフォルト) · S1: ロックリング · S2: キー溝+クランプ · K: キー溝 · A: カスタム |
| 出力軸公差 | h7 — すべてのフレームサイズ(EP-ZDEと同じ) |
| 定格耐用年数 | 定格負荷時20,000時間(L10ベアリング寿命) |
| 瞬時停止トルク | 定格出力トルクの2倍 |
EP-ZDWEシリーズ — 機械的寸法(単位:mm)
L12は、垂直入力フランジを含むギアボックスの全高であり、モーターが上向きまたは下向きに排出される際の重要な寸法です。L1は出力軸に沿った全長であり、インラインEP-ZDEと比較して軸方向のスペースがどれだけ節約できるかを決定する寸法です。
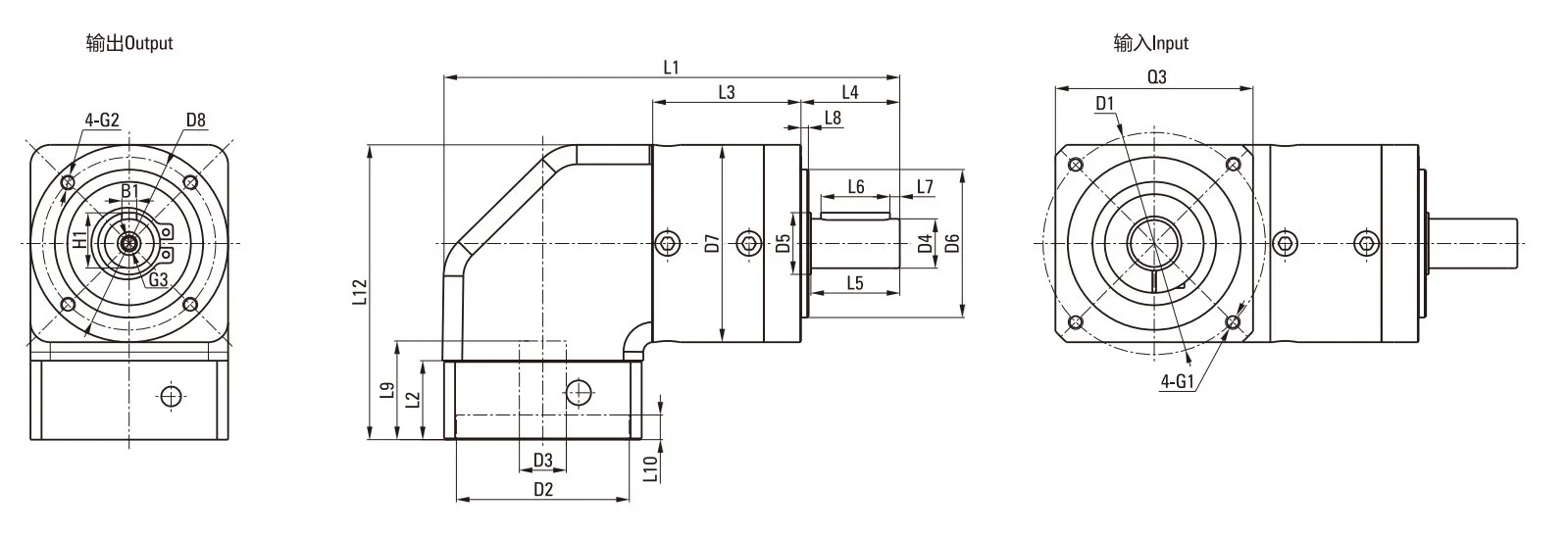
| 寸法 | 60ZDWE | 80ZDWE | 120ZDWE | 160ZDWE |
|---|---|---|---|---|
| 全長L1 — 1段(軸方向、出力側) | 150 | 184.5 | 249.2 | 368 |
| 全長L1 — 2段(軸方向、出力側) | 163 | 202.5 | 277 | 417.5 |
| 全高L12(垂直、入力フランジを含む) | 93 | 119.5 | 167.5 | 229 |
| 出力軸径D4 | Φ14h7 | Φ20h7 | Φ25h7 | Φ40h7 |
| 本体直径D7(丸フランジ) | Φ60 | Φ80 | Φ115 | Φ160 |
| 入力フランジ長さL2 | 20 | 32 | 38 | 66 |
| 入力フランジQ3(正方形) | □60 | □80 | □130 | □175 |
インストールガイド — EP-ZDWE 直角入力シリーズ
モーター入力方向 - 4つの方向を選択可能
EP-ZDWEの入力フランジは、出力軸に対して4つの位置に配置できます。モーター入力方向は、左、右、上、下です。ご注文時に必要な入力方向をご指定ください。ベベルギア段の向きは製造時に設定されます。密閉型長寿命潤滑システムにより、潤滑油の変更なしに4方向すべての入力方向に対応します。
インストール手順(ステップバイステップ)
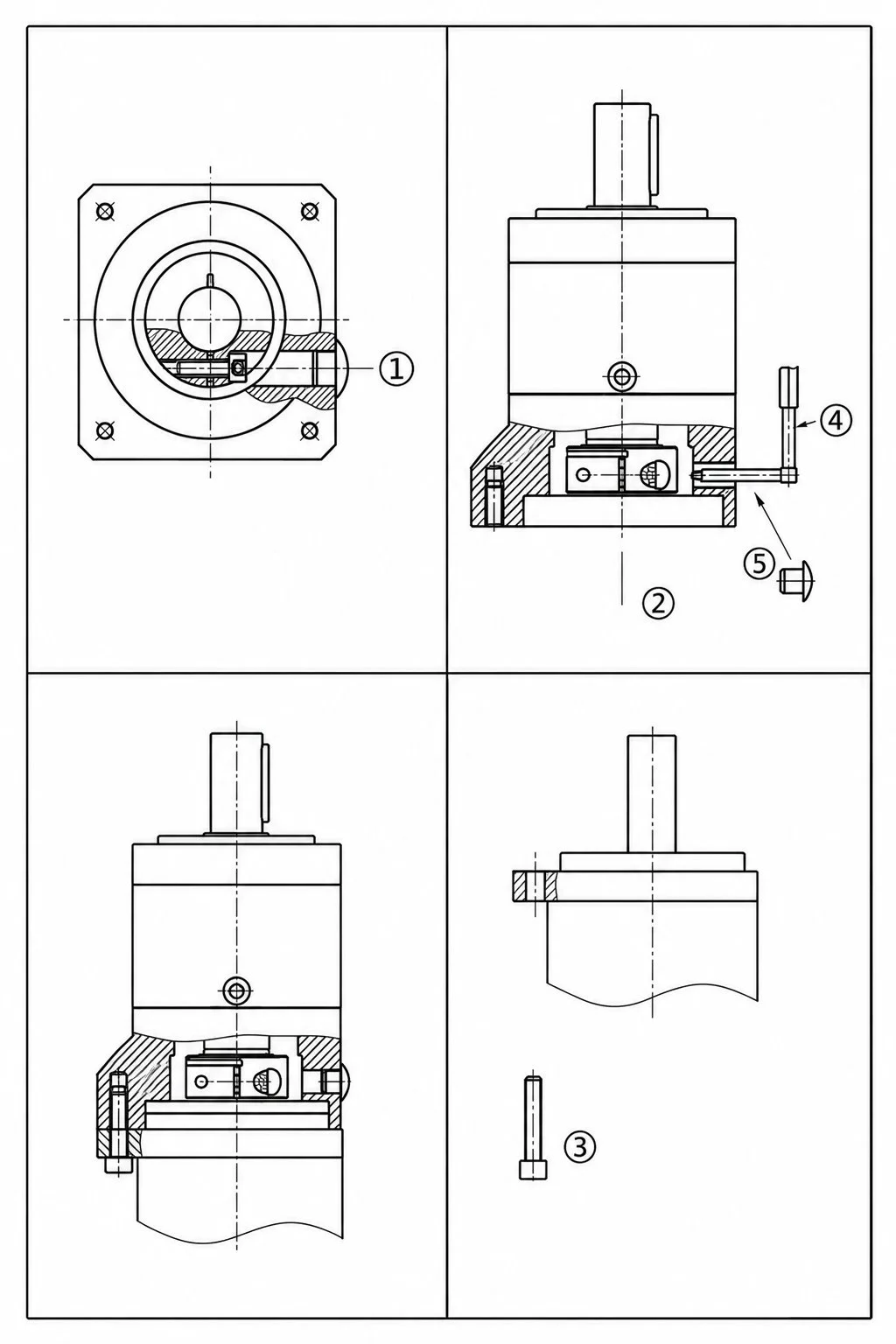
入力方向とモデルコードを確認してください
EP-ZDWEの型番に、入力方向指定(左/右/上/下)が含まれていることを確認してください。フレームサイズ(60~160)、ギア比、出力フランジD7(Φ60~Φ160 mm)、および入力フランジQ3がサーボモーターの前面と一致していることを確認してください。取り付け前に、L12(垂直方向の全高)が使用可能な機械セクションの高さ内に収まっていることを確認してください。
モーターカップリング - 垂直クランプ入力
サーボモーターシャフトを、ギアボックスのベベルステージ側の垂直入力穴に、モーター面が入力フランジに直角に接触するまで挿入します。クランプ入力(Sタイプ)は、モーターシャフトのキー溝の有無に関わらず使用できます。ロックネジを十字型に均等に締めます。モーター面と入力フランジの間に軸方向の隙間がないことを確認してください。隙間がある場合は、モーターシャフトの長さが入力穴の深さよりも短いことを示しています。必要に応じてスペーサーリングを使用してください。
出力フランジの機械への取り付け
EP-ZDWE 丸型出力フランジ (D7) の取り付け方法は EP-ZDE と全く同じです。スピゴットを機械の穴に合わせてぴったりと嵌め込み、4 本の G2 取付ネジを均等に締め付けます。取付面の平面度は 0.02 mm 以内である必要があります。締め付ける前に、モーターが機械構造やケーブル配線に接触することなく、指定された入力方向に十分に突き出せるクリアランスがあることを確認してください。
出力軸の接続とケーブル配線
標準の手順(キー幅B1:同じフレームサイズについてはZDE表を参照)に従って、負荷カップリングをh7出力軸D4に接続します。サーボモーターの電源ケーブルとエンコーダーケーブルは、ガントリーの移動中またはロボットアームの動き中にモーターコネクタにケーブルの張力が生じないように、モーターから離れた方向に配線します。90°入力配置では、通常、ケーブルはガントリーの移動方向と平行に引き出せるようになっています。ケーブルチェーンの配線は、設置時に計画してください。
積載および通関確認
出力軸中心 (L/2) に加わるラジアル荷重が最大ラジアル力を超えないことを確認してください。これは、同じフレームサイズの EP-ZDE と同じです (例: 80 フレームの場合は 900 N)。モーターシャフトを手動で出力方向に 1 回転させ、モーター本体がガントリーの移動範囲またはロボット関節角度範囲全体にわたって垂直方向のすべての機械構造物に干渉しないことを確認してください。これは、関節回転中に垂直方向のモーターが円弧を描くロボット手首関節の場合に特に重要です。
無負荷運転およびベベルステージのウォームアップ
定格入力速度≤50%で30分間無負荷運転を行い、ベベルステージからの異音がないか監視します。最初の10~15分間は、ベベルギアの接触面が慣らし運転の形状に馴染むため、軽いハミング音が聞こえることがありますが、これは正常です。出力ベアリング領域とベベルステージハウジングの両方でハウジング温度を監視し、どちらも周囲温度+90℃を超えないことを確認します。慣らし運転後にシステムのバックラッシュを確認し、基準値として記録します。
⚠ 直角入力に関する注意事項: モーターの入力方向は注文時に指定する必要があります。ベベルギアの向きは製造時に設定されており、現場で変更することはできません。入力方向を変更するためにベベルステージハウジングを回転させないでください。モーターの取り付け中は、ベベルステージの入力シャフトに軸方向の力を加えないでください。モーターの面をまっすぐに取り付けてください。機械の移動中にケーブルの張力によってモーターコネクタが引っ張られないように、ケーブル管理を徹底してください。
✔ メンテナンス不要 — ベベルステージ付属: EP-ZDWEは、工場で密封された永久潤滑システムにより、ベベルギア入力段と遊星ギア段の両方を単一の密封ハウジング内でカバーします。ベベルギアオイルの別注は不要で、レベルチェックも、ベベルギア段の定期潤滑も必要ありません。入力ベベルギアと遊星ギア出力段を含むギアボックス全体は、工場で注入された永久グリースで、定格寿命である20,000時間まで動作します。
用途 — 韓国の小型駆動装置設計におけるEP-ZDWE直角遊星歯車減速機
小型CNC工作機械用主軸台 - 回転軸駆動
韓国の小型5軸マシニングセンタメーカーは、回転軸後方のコラムの奥行きが機械コラムの断面によって制限される機械において、A軸およびB軸回転テーブル駆動装置としてEP-ZDWE-80およびEP-ZDWE-120を使用しています。一般的な韓国の小型5軸マシニングセンタのコラムは、A軸フランジ面後方の利用可能な奥行きが220~250 mmですが、1 kWサーボモーターとEP-ZDE-80を合わせた264 mmの奥行きには不十分です。EP-ZDWE-80は軸方向の奥行きを184.5 mm(1段)に縮小し、モーターは利用可能なコラム幅内で横方向に排出されます。昌原と仁川にある韓国のマシニングセンタOEMは、EP-ZDWEにより製品ライン全体でコラムの断面を80~100 mm縮小でき、機械の重量と価格の削減につながると報告しています。
協働ロボットの手首と肘の関節
韓国の協働ロボットメーカーは、外径80mm以下のアームを設計する際に、手首のロール(アーム軸を中心とした回転)駆動にEP-ZDWE-60を使用しています。手首関節にインラインモーターと遊星歯車機構を配置すると、モーターが手首エンドエフェクタの取り付けフランジから突き出す必要があり、有効アーム長が長くなり、ロボットの到達距離対奥行き比が低下します。EP-ZDWE-60は、モーターを手首軸に垂直に配置することで、アームの外径をモーターの外径ではなく、ギアボックス本体(Φ60mm)によって制御します。 角フランジ直角タイプ プレートマウント構造を使用する手首関節については、以下を参照してください。 EP-ZDWFシリーズ.
高速ガントリーレーザー切断 ― コンパクトなY軸キャリッジ
韓国のファイバーレーザー切断システムメーカーは、最大4m幅の板金切断システム向けに狭幅Y軸キャリッジを設計する際、キャリッジ駆動軸にEP-ZDWE-80を採用しています。狭幅キャリッジによりY軸の可動質量と慣性モーメントが低減され、加速率の向上とサイクルタイムの短縮が可能になります。モーターがキャリッジから横方向に突き出ているため、ケーブルマネジメントチェーンをY軸の移動方向と平行に配置できます。これは、モーターが軸方向に突き出ているインライン構成の場合、ケーブルチェーンがモーターの長さを障害物として考慮する必要があるため、よりすっきりとしたレイアウトになります。
狭幅コンベアおよび選別システム
韓国のeコマースフルフィルメントおよび小包仕分けシステムインテグレーターは、ベルト幅とギアボックスの奥行きの比率が制限される狭ピッチコンベヤセクションの駆動ローラーにEP-ZDWE-60を使用しています。幅150mmのコンベヤセクションでは、フレームから260mm以上突き出たインラインモーターと遊星ギアボックスでは、より大きなハウジングまたはクロスビームが必要になります。EP-ZDWE-60はコンベヤフレームの奥行き内に収まり、モーターは隣接するコンベヤモジュールの間から下方または横方向に突き出ます。これは、仁川、水原、富川のフルフィルメントセンターにある韓国の高密度仕分けコンベヤシステムで一般的な設計です。
多軸半導体ウェハ搬送装置 ― コンパクトなアームジョイント
韓国の半導体製造装置メーカーは、300 mmウェハ搬送用の大気側多軸ウェハ搬送ロボットを設計する際に、ロボットアームリンクの長さが装置の前面開口型一体型ポッド(FOUP)ロードポートの形状によって制限される場合、肘関節と肩関節にEP-ZDWE-60を使用しています。密閉型のEP-ZDWE-60は、クリーンルームの粒子汚染評価(ISO 14644-1 クラス7)に合格しており、工場で密封されたグリースは、通常の動作中にベベルステージから検出可能な粒子を発生させません。EP-ZDWE(60フレームで30分角以下)のバックラッシュはEP-ZDE(8分角以下)よりも大きいですが、サーボフィードバックループが閉ループ位置制御によってギアボックスのバックラッシュを補償する位置制御型ウェハ搬送ロボットでは許容範囲内です。
医療画像診断機器 ― 小型軸駆動装置
CTスキャナーのガントリー回転駆動装置や手術用ロボットアームの関節を設計する韓国の医療機器メーカーは、ガントリーハウジングの外形が患者クリアランス要件やIEC 60601医療用電気機器筐体寸法によって制約される軸に、EP-ZDWE-60およびEP-ZDWE-80を使用しています。垂直モーター配置により、ガントリーまたはアームの断面は、モーターとギアボックスの全長に左右されることなく、構造荷重要件を満たす最小容積となるように最適化できます。また、寿命まで密閉された潤滑方式は、医療機器のメンテナンス間隔要件を満たしています。
品質認証および試験基準
- ✔直角入力 サーボギアボックス ベベルギアの接触を確認済み — 歯面のかみ合いを製造バッチごとに測定
- ✔バックラッシュは定格出力トルクの±3%で測定され、測定証明書はすべての注文に添付されます。
- ✔各ユニットの出荷前に定格出力トルクでの全負荷トルク試験を実施
- ✔IEC 60529に基づくIP54侵入性検証 - すべての生産バッチ
- ✔納品ごとに材料証明書と寸法図が付属します。

韓国のエンジニアが韓国エバーパワーEP-ZDWEを指定する理由
📐
30-50% 軸方向深さ低減 ― より小型の機械設計を実現
モーターとギアボックスを合わせた奥行きが、機械のコラム断面、アーム径、またはキャリッジ形状を制限する制約となっている韓国の機械メーカーにとって、EP-ZDWEはより小型の機械設計を直接可能にします。30~50%の軸方向減速比は、実際の機械重量の削減、構造コストの低減、そして多くの場合、韓国のOEM市場におけるより競争力のある製品仕様につながります。
🔄
EP-ZDEと同じ出力 — 出力側インターフェースはそのまま引き継がれています
韓国のエンジニアが機械設計をEP-ZDEからEP-ZDWEに移行する場合、モーター取り付けインターフェースを更新するだけで済みます。出力軸径D4、丸フランジ径D7、取り付け穴パターン、トルク定格はフレームサイズごとに同一です。出力側の機械図面、カップリング仕様、出力ベアリング支持計算は変更なく引き継がれます。
🔒
生涯潤滑によりベベルステージがカバーされるため、別途ベベルオイルのメンテナンスは不要です。
多くの直角ギアボックスは、ベベルギア段用に独立したオイルリザーバーを使用しており、定期的なオイルレベルの確認と交換が必要です。EP-ZDWEの工場密封型グリースは、ベベルギア入力段と遊星ギア出力段の両方を単一の密封ハウジングでカバーするため、ベベルギア段を含め、ギアボックス全体で20,000時間以上、潤滑メンテナンスが不要です。これは、現場でのメンテナンスが制限されている韓国のロボットおよびコンベアメーカーにとって特に高く評価されています。
🎯
入力方向は4つ ― 左、右、上、下
EP-ZDWEは、出力軸に対して4つの位置にモータ入力部を配置できます。韓国の機械設計者は、多くの競合他社の直角減速機のように単一のモータ方向に限定されることなく、特定の設置形状に合わせてケーブル配線、重心、およびメンテナンスアクセスを最適化できます。4つの入力方向すべてにおいて、同じ密閉潤滑システムを使用し、トルク、バックラッシュ、およびIP54規格を満たしています。
🌡️
−25℃~+90℃ — インラインシリーズと同じ範囲
EP-ZDWEの温度範囲はEP-ZDEと同一であり、ベベルステージによる動作範囲の制限はありません。韓国のコールドチェーン物流および冷凍食品加工用途では、インラインシリーズと同様に、低温潤滑剤の変更なしに-25℃でEP-ZDWEを使用できます。周囲温度+90℃の高温包装ラインへの設置も仕様の範囲内です。
🇰🇷
韓国の応用工学 ― 入力方向と空間計算
韓国エバーパワーの韓国アプリケーションチームは、EP-ZDWEのフレームサイズ選定、入力方向の推奨、軸方向深さの計算(L1とインラインZDEの比較)、およびモータ入力フランジの仕様を韓国語で提供します。EP-ZDWEが対象とする機械断面に対応できるかどうかを検討している韓国の工作機械およびロボットOEM向けに、チームは発注前に設置範囲の比較(ZDWEとZDEの比較)を無償で提供します。

顧客レビューとアプリケーションに関するフィードバック
5つ星
88%
4★
10%
≤3 ★
2%
コンパクト5軸VMCのA軸回転テーブルには、20:1の2段式EP-ZDWE-120を使用しました。以前の機械世代では、モーターがインラインのEP-ZDE-120を使用していました。モーターとギアボックスの組み合わせは321 mmで、クリアランスを確保するために380 mmのコラム断面が必要でした。EP-ZDWE-120では、軸方向の深さは277 mm(2段式)で、モーターは横方向に出ており、コラム断面を300 mmに縮小しました。この80 mmのコラム幅の縮小により、60台の生産で1台あたり22 kgの軽量化を実現しました。韓国のEver-Powerは、三菱HG-SRモーターの入力方向(モーター右)と入力フランジを1営業日で確認しました。
EP-ZDWE-60は、6軸協働ロボットの手首ロールジョイント用に16:1の2段構成で使用しました。目標手首外径は72mmでしたが、このトルクレベルではインラインモーターでは不可能でした。EP-ZDWE-60(本体径Φ60mm)を使用することで、前腕に沿って上向きにモーターを出し、手首外径を68mmにすることができました。当初は2段構成のバックラッシュが35分角未満であることに懸念がありましたが、位置制御ループでバックラッシュの影響を補正し、ジョイントの位置はISO 9283ロボット精度クラスの仕様を満たしています。ベベルステージとプラネタリーステージの両方で生涯潤滑が不可欠でした。当社のロボットは食品加工環境で稼働しており、メンテナンスへのアクセスが制限され、グリース汚染はコンプライアンス上の問題となるためです。
EP-ZDWE-80は、狭幅キャリッジファイバーレーザー切断システムのY軸用として、10:1のシングルステージを採用しています。作業エリアは3m×8m、送り速度は120m/分です。キャリッジプロファイルの幅は160mmに制限されています(ガイドレールの中心によって制約されます)。当社の400Wヤスカワモーターを搭載したインラインEP-ZDE-80では、軸方向に246mm突き出ることになり、より広いキャリッジが必要となり、ガイドレールの設計変更も必要になります。EP-ZDWE-80は、L1が184.5mmで、モーターは160mmのキャリッジ内で横方向に出ており、ケーブルチェーンは障害物なく軸方向に走っています。現在、1日2シフトで18ヶ月間稼働していますが、ベベルステージに問題はなく、騒音も稼働開始後1週間で落ち着きました。
EP-ZDWE申請に関するご経験を共有してください。 韓国エバーパワーへのお問い合わせ先: [email protected]
韓国エバーパワーシリーズの関連製品
EP-ZDWEは、韓国エバーパワー社製の製品で、直角入力、丸フランジ仕様のバリエーションです。 精密遊星ギアボックス EPシリーズ。以下のシリーズは、形状または用途において直接的な関連性を持っています。
EP-ZDEシリーズ - インライン入力、丸型フランジ
EP-ZDWEの同軸インラインバージョン。出力フランジとトルク定格は同じ丸型フランジで、モータは出力軸と一直線上に配置されます。バックラッシュは8分角未満(ZDWEは25~30分角未満)、単段効率は96%(ZDWEは94%)です。軸方向のスペースに余裕があり、バックラッシュの最小化または効率の最大化が優先される場合は、EP-ZDEをお選びください。
EP-ZDWFシリーズ - 直角入力、角フランジ
性能仕様はすべてEP-ZDWEと同一です。直角ベベル入力、トルク定格、バックラッシュはすべて同じですが、プレート取り付け用に角型出力フランジ(□60~□175 mm)を備えています。EP-ZDWEの軸方向省スペース性と、穴取り付け式の丸型フランジではなく平板ボルト締め式の出力取り付けが必要な場合は、EP-ZDWFをお選びください。
EP-ZDSシリーズ ― 高剛性、高荷重
800 N·m の EP-ZDWE-160 では不十分な場合、EP-ZDS はインライン入力、角型フランジ、IP65 保護等級、最大 130 N·m/arcmin のねじり剛性、および最大 28,000 N の軸力で、最大 1,800 N·m (190 フレーム) のトルクを供給します。注: EP-ZDS はインライン専用です。直角モータ入力による重負荷の場合は、カスタム構成について Korea Ever-Power にお問い合わせください。
よくある質問
追加情報
| エディタ | Cxm |
|---|
関連製品
-

EP-ADRシリーズ 直角丸フランジ精密遊星歯車減速機(EP-ADR047~EP-ADR255)
-

EP-ADシリーズ 円形フランジ付き高精度インライン遊星歯車減速機(EP-AD047~EP-AD255)
-

EP-ABシリーズ 標準角フランジ高精度インライン遊星歯車減速機(EP-AB042~EP-AB220)
-

EP-BPGAシリーズ 省エネ型遊星歯車減速機 ― A型フランジ、モータ取付型(EP-BPGA040~EP-BPGA160)
-

EP-BAFシリーズ高精度遊星歯車減速機 ― 高剛性出力軸(EP-BAF042~EP-BAF220)
-

チェーン駆動式飼料ミキサー用PGAオーガー遊星ギアボックス
-

VRシリーズ チェーン伝動用高精度遊星ギアボックス
-

産業用チェーンドライブ向けPLS精密遊星ギアボックス


























