ईपी-जेडडीडब्ल्यूई सीरीज राइट-एंगल इनपुट प्रेसिजन प्लैनेटरी गियरबॉक्स

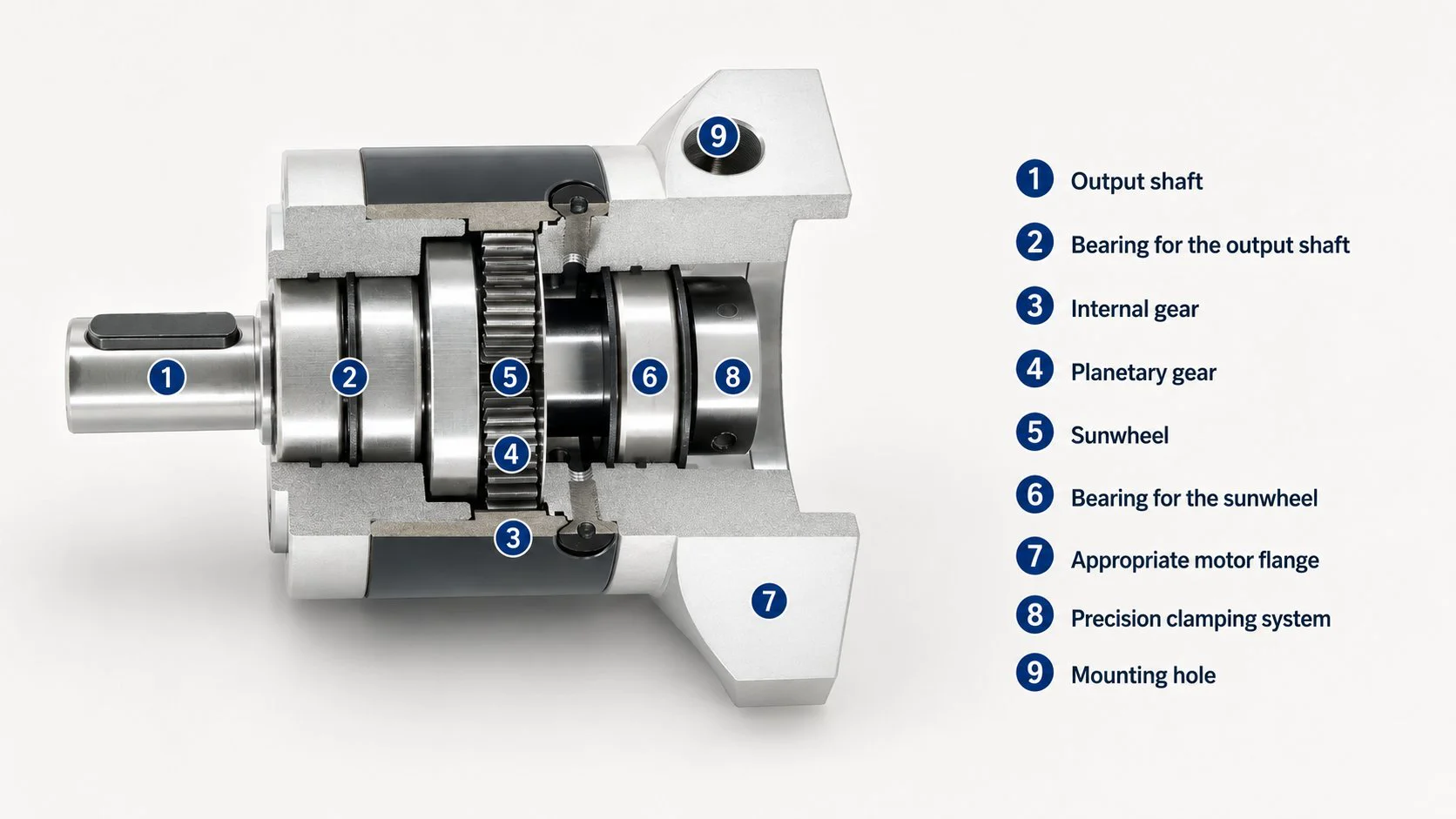
EP-ZDWE सीरीज़ एक समकोण इनपुट वाला सटीक प्लेनेटरी गियरबॉक्स है, जिसमें 90° बेवल इनपुट स्टेज और गोल सर्कुलर-फ्लेंज आउटपुट है। यह EP-ZDWE-60 से EP-ZDWE-160 तक चार फ्रेम साइज़ में उपलब्ध है। यह 12 N·m से 800 N·m तक का रेटेड आउटपुट टॉर्क प्रदान करता है, जिसमें बैकलैश <25–30 आर्कमिन और सिंगल-स्टेज दक्षता 94% है। 90° बेवल इनपुट सर्वो मोटर को आउटपुट शाफ्ट अक्ष के लंबवत स्थिति में रखता है, जिससे इनलाइन EP-ZDE की तुलना में कुल अक्षीय इंस्टॉलेशन लंबाई 30–50% तक कम हो जाती है। यही कारण है कि EP-ZDWE कोरियाई कॉम्पैक्ट मशीन टूल हेडस्टॉक, रोबोट जॉइंट और सीमित स्थान वाले सर्वो एक्चुएटर डिज़ाइन के लिए पसंदीदा समकोण सटीक प्लेनेटरी गियर रिड्यूसर है। इसका अनुपात 3:1 से 512:1 तक है और इसमें आजीवन लुब्रिकेशन और IP54 सुरक्षा मिलती है।
EP-ZDWE सीरीज़ — समकोण इनपुट प्रेसिजन प्लैनेटरी गियरबॉक्स | गोल फ्लेंज, 30–50% अक्षीय स्थान बचत, 800 N·m तक
EP-ZDWE आंतरिक बेवल गियर स्टेज के माध्यम से सर्वो मोटर को आउटपुट शाफ्ट से 90° के कोण पर स्थापित करता है, जिससे इनलाइन की तुलना में मोटर + गियरबॉक्स असेंबली की कुल अक्षीय लंबाई 30–50% तक कम हो जाती है। ईपी-जेडडीई ग्रहीय गियरबॉक्सआउटपुट एक है। गोल (वृत्ताकार) माउंटिंग फ्लेंज आउटपुट-साइड इंस्टॉलेशन के लिए EP-ZDE के समान। वर्गाकार फ्लेंज वाले समकोण संस्करण के लिए, देखें ईपी-जेडडीडब्ल्यूएफ श्रृंखला.
The ईपी-जेडडीडब्ल्यूई श्रृंखला का समकोण इनपुट वाला सटीक ग्रहीय गियरबॉक्स कोरिया की एवर-पावर कंपनी सर्वो ड्राइव डिज़ाइन में सबसे आम स्थानिक बाधा को दूर करती है: मोटर अक्ष आउटपुट शाफ्ट अक्ष के साथ समाक्षीय नहीं हो सकता। कॉम्पैक्ट मशीन टूल हेडस्टॉक, रोबोट रिस्ट जॉइंट, संकीर्ण प्रोफ़ाइल कन्वेयर ड्राइव और मल्टी-एक्सिस गैन्ट्री सिस्टम में, जहाँ आउटपुट शाफ्ट के पीछे उपलब्ध गहराई सीमित होती है, EP-ZDWE मोटर को आउटपुट के लंबवत स्थापित करता है — चाहे बाएँ/दाएँ या ऊपर/नीचे — जिससे उस अक्षीय स्थान की पुनः प्राप्ति होती है जिसे अन्यथा एक इनलाइन मोटर द्वारा उपयोग किया जाता।
इनलाइन EP-ZDE की तुलना में बेवल इनपुट स्टेज एक अतिरिक्त गियर मेश जोड़ता है, जिससे सिंगल-स्टेज दक्षता 96% (EP-ZDE) से घटकर हो जाती है। 94% यह एक मामूली समझौता है जिसे कोरियाई मशीन डिजाइनर इंस्टॉलेशन के लिए कम जगह घेरने के बदले आसानी से स्वीकार कर लेते हैं। आउटपुट शाफ्ट, गोल फ्लेंज, बेयरिंग व्यवस्था, आजीवन लुब्रिकेशन और IP54 सीलिंग समान फ्रेम आकार के EP-ZDE के समान हैं, जिससे आउटपुट साइड इंस्टॉलेशन पूरी तरह से सटीक हो जाता है।
90° बेवल इनपुट — यह अक्षीय स्थान कैसे बचाता है और इसका उपयोग कब करना चाहिए

इनलाइन इनपुट (EP-ZDE) — कुल अक्षीय लंबाई
[====मोटर====][===ZDE===]──▶ आउटपुट
कुल गहराई = मोटर + L1
उदाहरण के लिए 80-फ्रेम 1-चरण:
मोटर ~120 मिमी + L1 144 मिमी
= लगभग 264 मिमी अक्षीय गहराई
समकोण इनपुट (EP-ZDWE) — अक्षीय बचत
↓ 90° बेवल
[=====ZDWE=====]──▶ आउटपुट
कुल गहराई = केवल गियरबॉक्स L1
उदाहरण के लिए 80-फ्रेम 1-चरण:
L1 की अक्षीय गहराई केवल 184.5 मिमी है।
मोटर बगल से बाहर निकलती है → सुरक्षित!
तीन इंजीनियरिंग स्थितियाँ जहाँ EP-ZDWE सही विकल्प है
① मशीन के बाहरी आवरण की आउटपुट के पीछे गहराई की सीमा है — मोटर को सीधे फिट नहीं किया जा सकता।
कोरियाई कॉम्पैक्ट मशीनिंग सेंटर हेडस्टॉक, डायल-इंडेक्स मशीन टूल रोटरी एक्सिस यूनिट और नैरो-प्रोफाइल कन्वेयर ड्राइव में गियरबॉक्स आउटपुट फ्लेंज के पीछे उपलब्ध गहराई पर अक्सर एक कठोर संरचनात्मक सीमा होती है। 1 किलोवाट सर्वो मोटर वाले 80-फ्रेम इनलाइन EP-ZDE में, मोटर + गियरबॉक्स असेंबली की कुल गहराई 260–290 मिमी तक पहुँच सकती है — जो मशीन कॉलम या आर्म सेक्शन में उपलब्ध स्थान से अधिक है। समान मोटर वाला EP-ZDWE-80 अक्षीय गहराई को केवल गियरबॉक्स की लंबाई (184.5 मिमी, 1-स्टेज) तक कम कर देता है, जिसमें मोटर मशीन सेक्शन की उपलब्ध चौड़ाई के भीतर बग़ल में फैली होती है। यह 30–40% अक्षीय कमी अक्सर कोरियाई मशीन टूल डिजाइनरों के लिए एक कॉम्पैक्ट सिंगल-कॉलम डिजाइन और एक व्यापक (और भारी) डुअल-कॉलम संरचना के बीच निर्णायक कारक होती है।
② रोबोट आर्म क्रॉस-सेक्शन इनलाइन मोटर प्लेसमेंट को सीमित करता है
कोरियाई सहयोगी रोबोट और औद्योगिक रोबोट कलाई जोड़ डिज़ाइनरों को एक मूलभूत समस्या का सामना करना पड़ता है: जोड़ को रोबोट भुजा के बाहरी व्यास (आमतौर पर 6 किलोग्राम पेलोड वाले रोबोट के लिए 60-100 मिमी) के भीतर फिट होते हुए महत्वपूर्ण टॉर्क (आमतौर पर कलाई पर 20-80 N·m) संचारित करना होता है। इस टॉर्क स्तर पर इनलाइन मोटर + प्लेनेटरी गियरबॉक्स का संयोजन रोबोट लिंक की लंबाई को काफी बढ़ा देता है, जिससे रोबोट के कार्यक्षेत्र और गतिशील संतुलन पर असर पड़ता है। EP-ZDWE मोटर को जोड़ अक्ष के लंबवत स्थिति में रखता है, जिससे रोबोट की कलाई का बाहरी व्यास संयुक्त मोटर + गियरबॉक्स की गहराई के बजाय गियरबॉक्स बॉडी के व्यास (Φ60-Φ80 मिमी) द्वारा नियंत्रित होता है। सुवन और सियोंगनाम में कोरियाई सहयोगी रोबोट निर्माताओं ने EP-ZDWE-60 और EP-ZDWE-80 के माध्यम से कलाई जोड़ डिज़ाइन विकसित किए हैं जो इनलाइन मोटर कॉन्फ़िगरेशन की तुलना में लिंक की लंबाई को 80-120 मिमी तक कम कर देते हैं।
③ बहु-अक्षीय गैन्ट्री प्रणाली — गुरुत्वाकर्षण केंद्र के अनुकूलन के लिए समानांतर मोटर व्यवस्था
कोरियाई हाई-स्पीड लेजर कटिंग और पिक-एंड-प्लेस गैन्ट्री सिस्टम, जो एक कॉम्पैक्ट कैरिज असेंबली से X, Y और Z अक्षों को संचालित करते हैं, EP-ZDWE तकनीक से लाभान्वित होते हैं। यह तकनीक तीनों सर्वो मोटरों को कैरिज की यात्रा दिशा के समानांतर व्यवस्थित करने की अनुमति देती है - मोटरें आगे और पीछे की बजाय बगल की ओर इंगित करती हैं। इससे मोटर का द्रव्यमान कैरिज के गुरुत्वाकर्षण केंद्र के करीब केंद्रित हो जाता है, जिससे मोटर के जड़त्व के गतिशील आघूर्ण में कमी आती है और उच्च त्वरण दरों पर स्थिति निर्धारण सटीकता में सुधार होता है। 150 मीटर/मिनट से अधिक की फीड दरों पर कोरियाई लेजर कटिंग सिस्टम के लिए, समकोण पर मोटर लगाने से गुरुत्वाकर्षण केंद्र में होने वाला सुधार, दिशा परिवर्तन के समय प्रक्षेपवक्र त्रुटि को उल्लेखनीय रूप से कम करता है, जबकि इनलाइन कॉन्फ़िगरेशन में मोटर का द्रव्यमान कैरिज के ओवरहैंग को बढ़ाता है।
EP-ZDWE बनाम EP-ZDE — राइट-एंगल और इनलाइन इनपुट में से चयन करना
| मापदंड | ईपी-जेडडीई — इनलाइन इनपुट | EP-ZDWE — समकोण इनपुट ★ |
|---|---|---|
| मोटर से आउटपुट अभिविन्यास | कोएक्सियल — आउटपुट शाफ्ट के साथ सीधी रेखा में मोटर | 90° — मोटर आउटपुट शाफ्ट के लंबवत |
| कुल अक्षीय स्थापना गहराई | मोटर की लंबाई + गियरबॉक्स L1 (उदाहरण के लिए, 80-फ्रेम के लिए लगभग 264 मिमी) | गियरबॉक्स L1 केवल (उदाहरण के लिए 80-फ्रेम के लिए 184.5 मिमी) — 30–50% छोटा |
| एकल-चरण दक्षता | 96% — बेवल स्टेज में कोई नुकसान नहीं | 94% — बेवल स्टेज से लगभग 2% की हानि होती है |
| उपलब्ध फ्रेम आकार | 40 / 60 / 80 / 120 / 160 मिमी (5 आकार) | 60 / 80 / 120 / 160 मिमी (4 आकार — 40 मिमी फ्रेम उपलब्ध नहीं है) |
| आउटपुट फ्लेंज और शाफ्ट | एक समान — गोल निकला हुआ भाग D7, शाफ्ट D4 h7, प्रत्येक फ्रेम के लिए समान टॉर्क रेटिंग | |
| स्नेहन / आईपी / तापमान | एक समान — आजीवन सीलबंद ग्रीस · IP54 · −25°C से +90°C · किसी भी दिशा में उपयोग किया जा सकता है | |
| चुनें कब… | अक्षीय स्थान पर्याप्त है; दक्षता को प्राथमिकता दी गई है; सबसे छोटे फ्रेम (40 मिमी) की आवश्यकता है। | अक्षीय गहराई सीमित है; मोटर दिशा में लचीलेपन की आवश्यकता है; कॉम्पैक्ट आर्म/हेडस्टॉक डिज़ाइन। |
ईपी-जेडडीडब्ल्यूई श्रृंखला — संपूर्ण तकनीकी विनिर्देश
① रेटेड आउटपुट टॉर्क (एन·मी) — सभी फ्रेम आकार और अनुपात
| अनुपात | अवस्था | जेडडब्ल्यूई-60 | जेडडब्ल्यूई-80 | जेडडब्ल्यूई-120 | जेडडब्ल्यूई-160 |
|---|---|---|---|---|---|
| 3:1 | 1 | 12 | 40 | 80 | 400 |
| 4:1 | 1 | 16 | 50 | 110 | 450 |
| 5:1 | 1 | 16 | 50 | 110 | 450 |
| 8:1 | 1 | 15 | 45 | 100 | 400 |
| 10:1 | 1 | 12 | 40 | 80 | 305 |
| 9:1 | 2 | 40 | 100 | 210 | — |
| 12:1 | 2 | 40 | 100 | 210 | 700 |
| 16:1 | 2 | 44 | 120 | 260 | 800 |
| 20:1 | 2 | 44 | 120 | 260 | 800 |
| 25:1 | 2 | 40 | 110 | 230 | 700 |
| 32:1 | 2 | 44 | 120 | 260 | 800 |
| 40:1 | 2 | 40 | 110 | 230 | 700 |
| 64:1 | 2 | 40 | 100 | 210 | 700 |
| 60–512:1 | 3 | 40–44 | 100–120 | 210–260 | — |
2. भार वहन क्षमता, दक्षता, वजन और गति
| पैरामीटर | इकाई | जेडडब्ल्यूई-60 | जेडडब्ल्यूई-80 | जेडडब्ल्यूई-120 | जेडडब्ल्यूई-160 |
|---|---|---|---|---|---|
| अधिकतम रेडियल बल | एन | 450 | 900 | 2,100 | 6,000 |
| अधिकतम अक्षीय बल | एन | 225 | 450 | 1,050 | 3,000 |
| दक्षता — 1-चरण | % | 94 (इनलाइन ईपी-जेडडीई के लिए 961टीपी3टी की तुलना में - बेवल स्टेज) | |||
| दक्षता — 2-चरण | % | 92 | |||
| दक्षता — 3-चरण | % | 88 | |||
| वज़न — 1-चरण | किलोग्राम | 1.7 | 4.4 | 12 | 36 |
| वज़न — 2-चरण | किलोग्राम | 1.9 | 5 | 14 | 40 |
| वज़न — 3-चरण | किलोग्राम | 2.1 | 5.5 | 16 | — |
| मरोड़ कठोरता — 1-चरण | एन·मी/आर्कमिन | 1.5 | 4.5 | 10 | 38 |
| मरोड़ कठोरता — 2-चरण | एन·मी/आर्कमिन | 2.5 | 6.5 | 13 | 43 |
| शोर (निष्क्रिय अवस्था, 3,000 आरपीएम) | डीबी(ए) | 65 | 68 | 70 | 70 |
| अधिकतम इनपुट गति | आरपीएम | 4,500 | |||
| अनुशंसित इनपुट गति | आरपीएम | 3,000 | |||
③ फ्रेम और स्टेज द्वारा प्रतिक्रिया
| अवस्था | इकाई | जेडडब्ल्यूई-60 | जेडडब्ल्यूई-80 | जेडडब्ल्यूई-120 | जेडडब्ल्यूई-160 |
|---|---|---|---|---|---|
| प्रतिक्रिया — 1-चरण | आर्समिन | <30 | <25 | <25 | <25 |
| प्रतिक्रिया — 2-चरण | आर्समिन | <35 | <30 | <30 | <30 |
| प्रतिक्रिया — 3-चरण | आर्समिन | <40 | <35 | <35 | — |
④ सामान्य विशिष्टताएँ
| पैरामीटर | विनिर्देश |
|---|---|
| परिचालन तापमान | -25°C से +90°C |
| सुरक्षा रेटिंग | IP54 (IEC 60529) — धूल से पूरी तरह सुरक्षित, हर दिशा से आने वाले पानी के छींटों से सुरक्षित |
| स्नेहन | जीवनभर चलने वाला लुब्रिकेशन — फैक्ट्री-सील्ड, दोबारा ग्रीसिंग की आवश्यकता नहीं |
| माउंटिंग अभिविन्यास | कोई भी — क्षैतिज, ऊर्ध्वाधर, उलटा, कोई भी झुका हुआ कोण |
| मोटर इनपुट दिशा | 4 स्थितियाँ — बाएँ, दाएँ, ऊपर, नीचे (आउटपुट अक्ष से 90°, ऑर्डर करते समय निर्दिष्ट करें) |
| इनपुट शाफ्ट क्लैम्पिंग प्रकार | S: इंटीग्रल लॉकिंग (डिफ़ॉल्ट) · S1: लॉकिंग रिंग · S2: कीवे + क्लैम्पिंग · K: कीवे · A: कस्टम |
| आउटपुट शाफ्ट टॉलरेंस | h7 — सभी फ्रेम आकार (EP-ZDE के समान) |
| मूल्यांकित सेवा जीवन | निर्धारित भार पर 20,000 घंटे (L10 बेयरिंग लाइफ) |
| तत्काल स्टॉप टॉर्क | 2× रेटेड आउटपुट टॉर्क |
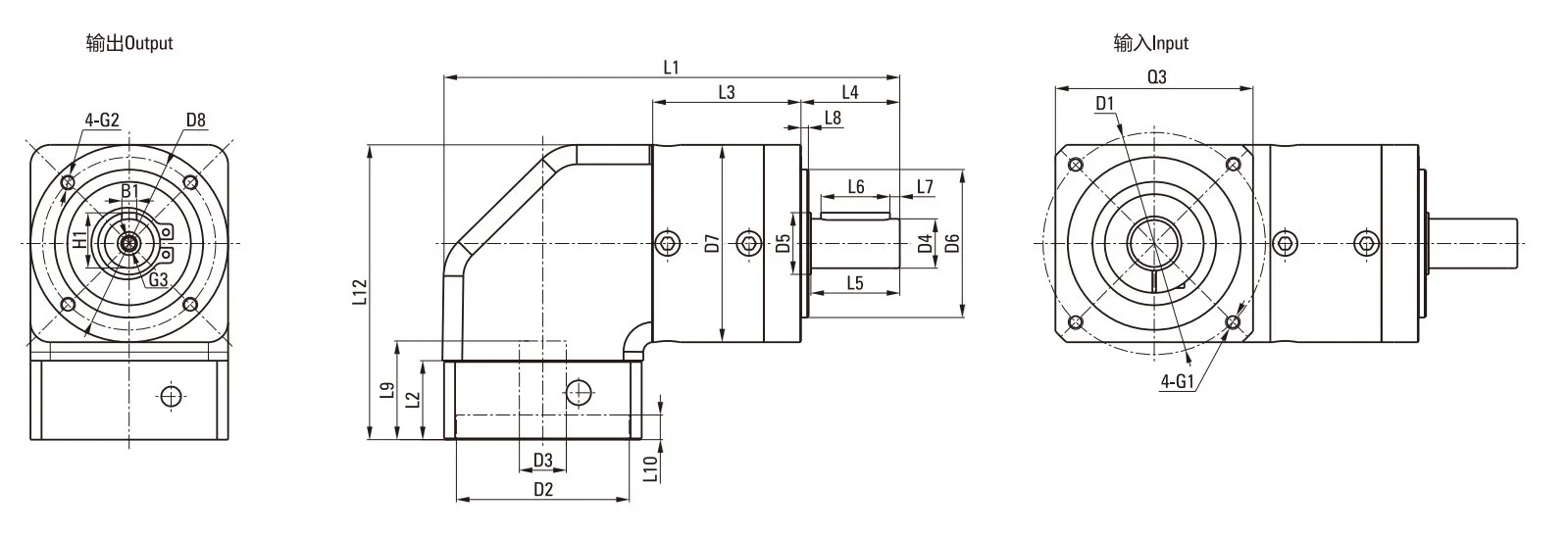
ईपी-जेडडीडब्ल्यूई सीरीज — यांत्रिक आयाम (इकाई: मिमी)
L12 गियरबॉक्स की कुल ऊंचाई है, जिसमें लंबवत इनपुट फ्लैंज भी शामिल है — यह वह महत्वपूर्ण आयाम है जब मोटर ऊपर या नीचे की ओर निकलती है। L1 आउटपुट अक्ष के साथ कुल लंबाई है — यह वह आयाम है जो निर्धारित करता है कि इनलाइन EP-ZDE की तुलना में कितनी अक्षीय जगह बचती है।
| आयाम | 60ZDWE | 80ZDWE | 120ZDWE | 160ZDWE |
|---|---|---|---|---|
| कुल लंबाई L1 — 1-चरण (अक्षीय, आउटपुट पक्ष) | 150 | 184.5 | 249.2 | 368 |
| कुल लंबाई L1 — 2-चरण (अक्षीय, आउटपुट पक्ष) | 163 | 202.5 | 277 | 417.5 |
| कुल ऊंचाई L12 (लंबवत, इनपुट फ्लैंज सहित) | 93 | 119.5 | 167.5 | 229 |
| आउटपुट शाफ्ट व्यास D4 | Φ14h7 | Φ20h7 | Φ25h7 | Φ40h7 |
| बॉडी का व्यास D7 (गोल निकला हुआ किनारा) | Φ60 | Φ80 | Φ115 | Φ160 |
| इनपुट फ्लेंज की लंबाई L2 | 20 | 32 | 38 | 66 |
| इनपुट फ्लेंज Q3 (वर्गाकार) | □60 | □80 | □130 | □175 |
स्थापना मार्गदर्शिका — EP-ZDWE राइट-एंगल इनपुट सीरीज़
मोटर इनपुट दिशा — 4 अभिविन्यास उपलब्ध हैं
EP-ZDWE इनपुट फ्लेंज को आउटपुट शाफ्ट अक्ष के सापेक्ष 4 स्थितियों में व्यवस्थित किया जा सकता है: मोटर इनपुट बाएँ, दाएँ, ऊपर या नीचे। ऑर्डर करते समय आवश्यक इनपुट दिशा निर्दिष्ट करें — बेवल गियर स्टेज का ओरिएंटेशन निर्माण के समय निर्धारित किया जाता है। सीलबंद लाइफटाइम लुब्रिकेशन बिना किसी लुब्रिकेशन संशोधन के सभी 4 इनपुट दिशाओं को सपोर्ट करता है।
स्थापना की चरण-दर-चरण प्रक्रिया
इनपुट दिशा और मॉडल कोड की पुष्टि करें
EP-ZDWE मॉडल कोड में इनपुट दिशा विनिर्देश (बाएं/दाएं/ऊपर/नीचे) शामिल है या नहीं, इसकी पुष्टि करें। फ्रेम का आकार (60–160), गियर अनुपात, आउटपुट फ्लैंज D7 (Φ60–Φ160 mm) और इनपुट फ्लैंज Q3 सर्वो मोटर के सामने वाले भाग से मेल खाते हैं या नहीं, इसकी पुष्टि करें। स्थापना से पहले यह सुनिश्चित कर लें कि L12 (कुल लंबवत ऊंचाई) उपलब्ध मशीन सेक्शन की ऊंचाई के भीतर आती है।
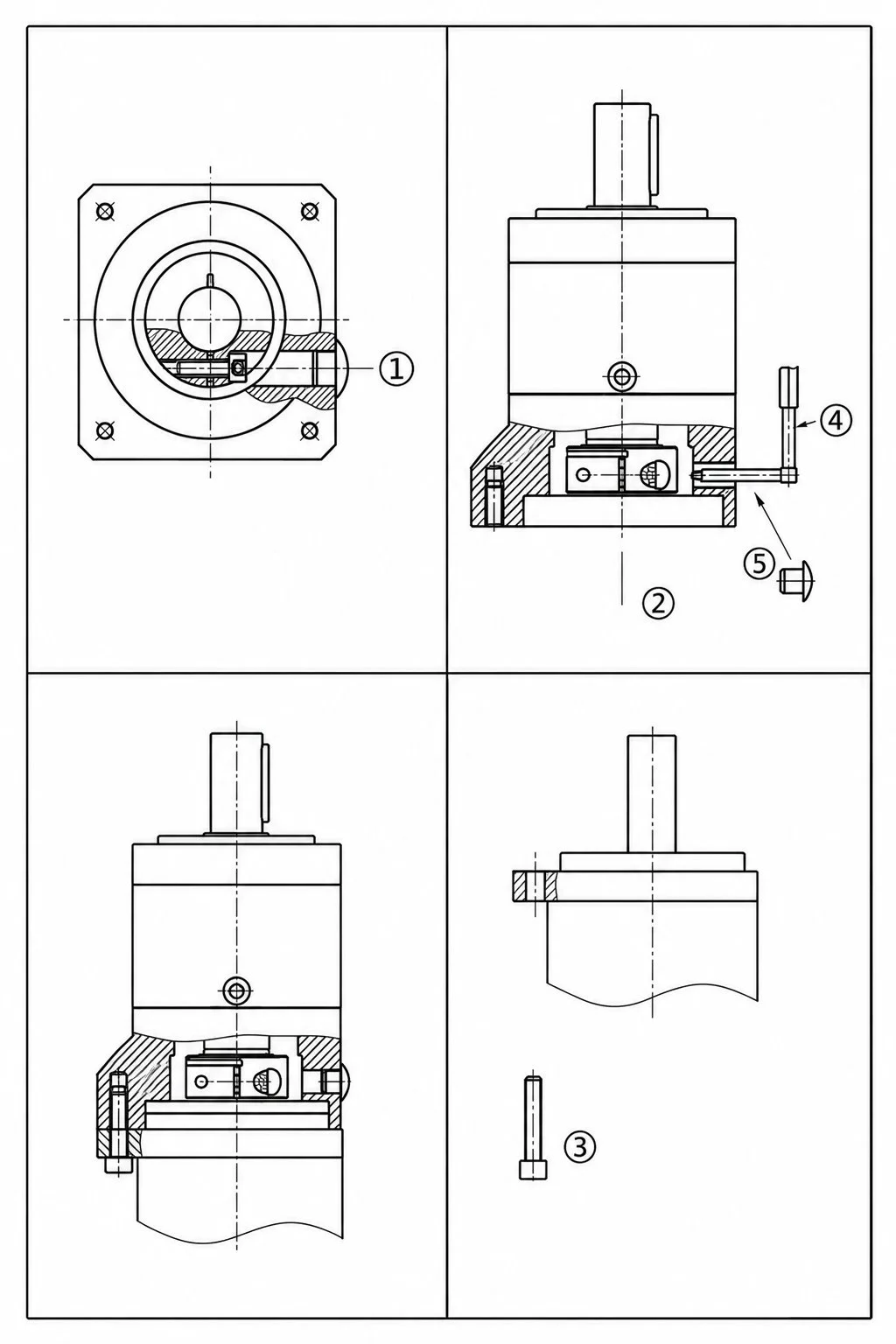
मोटर कपलिंग — लंबवत क्लैम्पिंग इनपुट
गियरबॉक्स के बेवल स्टेज साइड पर स्थित लंबवत इनपुट बोर में सर्वो मोटर शाफ्ट को तब तक डालें जब तक कि मोटर का सिरा इनपुट फ्लैंज से पूरी तरह से न टकरा जाए। क्लैम्पिंग इनपुट (एस-टाइप) मोटर शाफ्ट की-वे के साथ या उसके बिना काम करता है। लॉकिंग स्क्रू को क्रॉस पैटर्न में समान रूप से कसें। मोटर के सिरे और इनपुट फ्लैंज के बीच कोई अक्षीय अंतर न हो - अंतर यह दर्शाता है कि मोटर शाफ्ट की लंबाई इनपुट बोर की गहराई से कम है; यदि आवश्यक हो तो स्पेसर रिंग का उपयोग करें।
आउटपुट फ्लेंज को मशीन पर माउंट करना
EP-ZDWE राउंड आउटपुट फ्लेंज (D7) को EP-ZDE के समान ही माउंट किया जाता है। स्पिगोट को मशीन बोर के साथ संरेखित करें ताकि वह ठीक से फिट हो सके, 4×G2 माउंटिंग स्क्रू लगाएं और समान रूप से टॉर्क दें। माउंटिंग सतह की समतलता 0.02 मिमी के भीतर होनी चाहिए। कसने से पहले यह सुनिश्चित कर लें कि मोटर निर्दिष्ट इनपुट दिशा में मशीन संरचना या केबल से संपर्क किए बिना बाहर निकलने के लिए पर्याप्त जगह है।
आउटपुट शाफ्ट कनेक्शन और केबल रूटिंग
मानक प्रक्रिया का उपयोग करके लोड कपलिंग को h7 आउटपुट शाफ्ट D4 से कनेक्ट करें (की चौड़ाई B1: समान फ्रेम आकार के लिए ZDE तालिका देखें)। सर्वो मोटर पावर और एनकोडर केबलों को मोटर से दूर ऐसी दिशा में ले जाएं जिससे गैन्ट्री मूवमेंट या रोबोट आर्म मूवमेंट के दौरान मोटर कनेक्टर पर केबल तनाव उत्पन्न न हो। 90° इनपुट व्यवस्था आमतौर पर केबलों को गैन्ट्री मूवमेंट की दिशा के समानांतर बाहर निकलने की अनुमति देती है - इंस्टॉलेशन के दौरान केबल चेन रूटिंग की योजना बनाएं।
लोड और क्लीयरेंस सत्यापन
सुनिश्चित करें कि आउटपुट शाफ्ट के केंद्र (L/2) पर लगाया गया रेडियल लोड अधिकतम रेडियल बल से अधिक न हो — जो समान फ्रेम आकार पर EP-ZDE के समान हो (उदाहरण के लिए 80-फ्रेम के लिए 900 N)। मोटर शाफ्ट को मैन्युअल रूप से एक पूर्ण आउटपुट चक्कर घुमाएँ और सुनिश्चित करें कि मोटर बॉडी गैन्ट्री यात्रा सीमा या रोबोट जोड़ कोण सीमा के दौरान लंबवत दिशा में मशीन की सभी संरचनाओं से मुक्त हो — यह विशेष रूप से रोबोट कलाई जोड़ों के लिए महत्वपूर्ण है जहाँ लंबवत मोटर जोड़ के घूर्णन के दौरान एक चाप बनाती है।
नो-लोड रन-इन और बेवल स्टेज वार्म-अप
≤50% रेटेड इनपुट स्पीड पर 30 मिनट तक बिना लोड के चलाएं और बेवल स्टेज से आने वाले असामान्य शोर पर नज़र रखें। पहले 10-15 मिनट के दौरान हल्की गुनगुनाहट सामान्य है क्योंकि बेवल गियर की संपर्क सतहें अपनी रनिंग-इन ज्यामिति के अनुसार पॉलिश हो रही होती हैं। आउटपुट बेयरिंग क्षेत्र और बेवल स्टेज हाउसिंग दोनों के हाउसिंग तापमान की निगरानी करें और सुनिश्चित करें कि दोनों में से कोई भी परिवेशी तापमान +90°C से अधिक न हो। रन-इन के बाद सिस्टम बैकलैश की जांच करें और इसे बेसलाइन मान के रूप में रिकॉर्ड करें।
⚠ समकोण इनपुट के लिए सावधानियां: ऑर्डर देते समय मोटर इनपुट दिशा निर्दिष्ट करना आवश्यक है — बेवल गियर का ओरिएंटेशन निर्माण के समय निर्धारित किया जाता है और इसे फील्ड में बदला नहीं जा सकता। इनपुट दिशा बदलने के लिए बेवल स्टेज हाउसिंग को घुमाने का प्रयास न करें। मोटर इंस्टॉलेशन के दौरान बेवल स्टेज इनपुट शाफ्ट पर अक्षीय बल न लगाएं — मोटर के फेस को ठीक से बिठाएं। मशीन के चलने के दौरान केबल के तनाव से मोटर कनेक्टर को खींचने से बचाने के लिए केबल मैनेजमेंट बनाए रखें।
✔ रखरखाव की कोई आवश्यकता नहीं — बेवल स्टेज शामिल है: EP-ZDWE फैक्ट्री-सील्ड लाइफटाइम लुब्रिकेशन एक ही सीलबंद हाउसिंग में बेवल इनपुट स्टेज और प्लेनेटरी गियर स्टेज दोनों को कवर करता है। इसमें बेवल गियर के लिए अलग से तेल भरने, लेवल चेक करने या बेवल स्टेज के लिए निर्धारित लुब्रिकेशन की आवश्यकता नहीं होती है। पूरा गियरबॉक्स - इनपुट बेवल और प्लेनेटरी आउटपुट - फैक्ट्री द्वारा इंजेक्ट किए गए लाइफटाइम ग्रीस पर 20,000 घंटे की निर्धारित लाइफटाइम तक चलता है।
अनुप्रयोग — कोरियाई कॉम्पैक्ट ड्राइव डिज़ाइनों में EP-ZDWE राइट-एंगल प्लेनेटरी गियरबॉक्स
कॉम्पैक्ट सीएनसी मशीन टूल हेडस्टॉक्स — रोटरी एक्सिस ड्राइव
कोरियाई कॉम्पैक्ट 5-एक्सिस मशीनिंग सेंटर निर्माता A-एक्सिस और B-एक्सिस रोटरी टेबल ड्राइव के लिए EP-ZDWE-80 और EP-ZDWE-120 का उपयोग उन मशीनों में करते हैं जहाँ रोटरी एक्सिस के पीछे कॉलम की गहराई मशीन कॉलम के क्रॉस-सेक्शन द्वारा सीमित होती है। एक विशिष्ट कोरियाई 5-एक्सिस कॉम्पैक्ट मशीनिंग सेंटर कॉलम में A-एक्सिस फ्लेंज फेस के पीछे 220–250 मिमी की उपलब्ध गहराई होती है — जो 1 kW सर्वो मोटर + EP-ZDE-80 (264 मिमी) के संयुक्त उपयोग के लिए अपर्याप्त है। EP-ZDWE-80 अक्षीय गहराई को 184.5 मिमी (1-स्टेज) तक कम कर देता है, जिससे मोटर उपलब्ध कॉलम चौड़ाई के भीतर पार्श्व रूप से बाहर निकल जाती है। चांगवोन और इंचियोन में कोरियाई मशीनिंग सेंटर निर्माताओं का कहना है कि EP-ZDWE विभिन्न उत्पाद लाइनों में कॉलम क्रॉस-सेक्शन को 80–100 मिमी तक कम करने में सक्षम बनाता है, जिससे मशीन का वजन और कीमत कम हो जाती है।
सहयोगी रोबोट कलाई और कोहनी जोड़
कोरियाई सहयोगी रोबोट निर्माता जो 80 मिमी से कम बाहरी व्यास वाली भुजाओं को डिज़ाइन करते हैं, वे कलाई घुमाव (भुजा अक्ष के चारों ओर घूर्णन) ड्राइव के लिए EP-ZDWE-60 का उपयोग करते हैं। कलाई के जोड़ पर एक इनलाइन मोटर + प्लेनेटरी गियरबॉक्स के लिए मोटर को कलाई के एंड-इफ़ेक्टर माउंटिंग फ्लेंज से बाहर निकलना पड़ता है — जिससे प्रभावी भुजा की लंबाई बढ़ जाती है और रोबोट का पहुँच-से-गहराई अनुपात कम हो जाता है। EP-ZDWE-60 मोटर को कलाई अक्ष के लंबवत मार्ग प्रदान करता है, जिससे भुजा का बाहरी व्यास मोटर के बाहरी व्यास के बजाय गियरबॉक्स बॉडी (Φ60 मिमी) द्वारा नियंत्रित रहता है। वर्गाकार-फ्लेंज समकोण प्रकार प्लेट-माउंट संरचना का उपयोग करने वाले कलाई के जोड़ों के लिए, देखें ईपी-जेडडीडब्ल्यूएफ श्रृंखला.
हाई-स्पीड गैन्ट्री लेजर कटिंग — कॉम्पैक्ट वाई-एक्सिस कैरिज
कोरियाई फाइबर लेजर कटिंग सिस्टम निर्माता, जो 4 मीटर तक चौड़ी शीट मेटल काटने वाले सिस्टम के लिए संकीर्ण प्रोफाइल वाले वाई-एक्सिस कैरिज डिजाइन करते हैं, कैरिज ड्राइव एक्सिस के लिए EP-ZDWE-80 का उपयोग करते हैं। संकीर्ण कैरिज प्रोफाइल वाई-एक्सिस के चलने वाले द्रव्यमान और जड़त्व आघूर्ण को कम करता है, जिससे उच्च त्वरण दर और कम चक्र समय संभव हो पाता है। मोटर के कैरिज से पार्श्व रूप से बाहर निकलने के कारण, केबल प्रबंधन श्रृंखला वाई-एक्सिस की गति के समानांतर चल सकती है - यह इनलाइन कॉन्फ़िगरेशन की तुलना में अधिक सुव्यवस्थित लेआउट है, जहां केबल श्रृंखला को मोटर की लंबाई को एक बाधा के रूप में समायोजित करना पड़ता है।
संकीर्ण प्रोफ़ाइल कन्वेयर और छँटाई प्रणालियाँ
कोरियाई ई-कॉमर्स फुलफिलमेंट और पार्सल सॉर्टिंग सिस्टम इंटीग्रेटर संकीर्ण-पिच कन्वेयर सेक्शन पर ड्राइव रोलर्स के लिए EP-ZDWE-60 का उपयोग करते हैं, जहां बेल्ट की चौड़ाई और गियरबॉक्स की गहराई का अनुपात सीमित होता है। 150 मिमी चौड़े कन्वेयर सेक्शन पर, फ्रेम से 260 मिमी से अधिक बाहर निकले हुए इनलाइन मोटर + प्लेनेटरी गियरबॉक्स के लिए एक बड़े हाउसिंग या क्रॉस-बीम की आवश्यकता होगी। EP-ZDWE-60 कन्वेयर फ्रेम की गहराई के भीतर फिट हो जाता है और मोटर आसन्न कन्वेयर मॉड्यूल के बीच से नीचे या बगल की ओर निकलती है - यह इंचियोन, सुवन और बुचियोन के फुलफिलमेंट केंद्रों में कोरियाई उच्च-घनत्व सॉर्टेशन कन्वेयर सिस्टम में एक सामान्य डिज़ाइन है।
मल्टी-एक्सिस सेमीकंडक्टर वेफर ट्रांसपोर्ट — कॉम्पैक्ट आर्म जॉइंट्स
कोरियाई सेमीकंडक्टर उपकरण निर्माता 300 मिमी वेफर हैंडलिंग के लिए वायुमंडलीय छोर वाले मल्टी-एक्सिस वेफर ट्रांसपोर्ट रोबोट डिजाइन करते समय, EP-ZDWE-60 का उपयोग एल्बो और शोल्डर जॉइंट्स के लिए करते हैं, जहां रोबोट आर्म लिंक की लंबाई उपकरण के फ्रंट-ओपनिंग यूनिफाइड पॉड (FOUP) लोड-पोर्ट ज्यामिति द्वारा सीमित होती है। सीलबंद EP-ZDWE-60 क्लीनरूम कण संदूषण मूल्यांकन (ISO 14644-1 क्लास 7) को पास करता है - फैक्ट्री-सीलबंद ग्रीस सामान्य संचालन के दौरान बेवल स्टेज से कोई भी पता लगाने योग्य कण उत्पन्न नहीं करता है। ध्यान दें कि EP-ZDWE (≤30 आर्कमिन, 60-फ्रेम) का उच्च बैकलैश, EP-ZDE (≤8 आर्कमिन) की तुलना में, स्थिति-नियंत्रित वेफर ट्रांसपोर्ट रोबोट के लिए स्वीकार्य है, जहां सर्वो फीडबैक लूप क्लोज्ड-लूप स्थिति नियंत्रण के माध्यम से गियरबॉक्स बैकलैश की भरपाई करता है।
मेडिकल इमेजिंग और डायग्नोस्टिक उपकरण — कॉम्पैक्ट एक्सिस ड्राइव
सीटी स्कैनर गैन्ट्री रोटेशन ड्राइव और सर्जिकल रोबोट आर्म जॉइंट्स डिजाइन करने वाले कोरियाई चिकित्सा उपकरण निर्माता उन अक्षों के लिए EP-ZDWE-60 और EP-ZDWE-80 का उपयोग करते हैं जहां गैन्ट्री हाउसिंग का बाहरी प्रोफाइल रोगी की सुरक्षा संबंधी आवश्यकताओं और IEC 60601 चिकित्सा विद्युत उपकरण एनक्लोजर आयामों द्वारा सीमित होता है। लंबवत मोटर व्यवस्था गैन्ट्री या आर्म के क्रॉस-सेक्शन को न्यूनतम आयतन के लिए अनुकूलित करने की अनुमति देती है जो संरचनात्मक भार आवश्यकताओं को पूरा करता है, न कि संयुक्त मोटर + गियरबॉक्स की लंबाई द्वारा निर्धारित होता है। आजीवन सीलबंद स्नेहन चिकित्सा उपकरण रखरखाव अंतराल आवश्यकताओं को पूरा करता है।
गुणवत्ता प्रमाणन एवं परीक्षण मानक
- ✔समकोण इनपुट सर्वो गियरबॉक्स बेवल स्टेज गियर संपर्क सत्यापित किया गया — प्रत्येक उत्पादन बैच के लिए दांतों के पार्श्व जुड़ाव को मापा गया
- ✔रेटेड आउटपुट टॉर्क के ±3% पर प्रति यूनिट बैकलैश का मापन किया जाता है — प्रत्येक ऑर्डर के साथ मापन प्रमाण पत्र दिया जाता है।
- ✔शिपमेंट से पहले प्रत्येक यूनिट के लिए रेटेड आउटपुट टॉर्क पर फुल-लोड टॉर्क टेस्ट किया जाएगा।
- ✔प्रत्येक उत्पादन बैच के लिए IEC 60529 के अनुसार IP54 प्रवेश सत्यापन
- ✔प्रत्येक डिलीवरी के साथ सामग्री प्रमाण पत्र और आयामी आरेख प्रदान किया जाता है।

कोरियाई इंजीनियर कोरिया एवर-पावर ईपी-जेडडीडब्ल्यूई को क्यों चुनते हैं?
📐
30–50% अक्षीय गहराई में कमी — छोटे मशीन डिज़ाइन को संभव बनाता है
कोरियाई मशीन निर्माताओं के लिए, जहां मोटर + गियरबॉक्स की संयुक्त गहराई मशीन के कॉलम क्रॉस-सेक्शन, आर्म व्यास या कैरिज प्रोफाइल को सीमित करने वाली बाधा है, EP-ZDWE सीधे तौर पर एक छोटे मशीन डिजाइन को संभव बनाता है। 30–50% अक्षीय कमी से मशीन के वजन में वास्तविक बचत होती है, संरचना लागत कम होती है, और कई मामलों में कोरियाई OEM बाजार में अधिक प्रतिस्पर्धी उत्पाद विनिर्देश प्राप्त होते हैं।
🔄
EP-ZDE के समान आउटपुट — आउटपुट-साइड इंटरफ़ेस एक सीधा कैरीओवर है
कोरियाई इंजीनियर जो मशीन डिज़ाइन को EP-ZDE से EP-ZDWE में रूपांतरित कर रहे हैं, उन्हें केवल मोटर माउंटिंग इंटरफ़ेस को अपडेट करने की आवश्यकता है — आउटपुट शाफ्ट D4 का व्यास, गोल फ्लेंज D7, माउंटिंग होल पैटर्न और टॉर्क रेटिंग प्रत्येक फ्रेम आकार के लिए समान हैं। आउटपुट-साइड मशीन ड्राइंग, कपलिंग विनिर्देश और आउटपुट बेयरिंग सपोर्ट गणनाएँ बिना किसी परिवर्तन के लागू होती हैं।
🔒
बेवल स्टेज के लिए आजीवन लुब्रिकेशन की सुविधा - बेवल ऑयल के लिए अलग से रखरखाव की आवश्यकता नहीं।
कई समकोण गियरबॉक्स में बेवल स्टेज के लिए एक अलग तेल भंडार होता है, जिसमें समय-समय पर तेल के स्तर की जाँच और उसे बदलने की आवश्यकता होती है। EP-ZDWE का फैक्ट्री-सीलबंद लाइफटाइम ग्रीस एक ही सीलबंद हाउसिंग में बेवल इनपुट और प्लेनेटरी आउटपुट दोनों स्टेज को कवर करता है — जिससे बेवल स्टेज सहित पूरे गियरबॉक्स के लिए 20,000 घंटों से अधिक समय तक लुब्रिकेशन की कोई आवश्यकता नहीं होती है। यह विशेष रूप से कोरियाई रोबोट और कन्वेयर निर्माताओं के लिए उपयोगी है, जहाँ फील्ड मेंटेनेंस की सुविधा सीमित है।
🎯
4 इनपुट दिशाएँ — बाएँ, दाएँ, ऊपर, नीचे
EP-ZDWE मोटर इनपुट के साथ आउटपुट शाफ्ट अक्ष के सापेक्ष 4 स्थितियों में उपलब्ध है। कोरियाई मशीन डिज़ाइनर विशिष्ट इंस्टॉलेशन ज्यामिति के लिए केबल रूटिंग, गुरुत्वाकर्षण केंद्र और सर्विस एक्सेस को अनुकूलित कर सकते हैं - कई प्रतिस्पर्धी राइट-एंगल गियर रिड्यूसर की तरह एक ही मोटर दिशा तक सीमित नहीं। सभी 4 इनपुट दिशाओं में एक ही सीलबंद स्नेहन प्रणाली का उपयोग किया जाता है और इनमें समान टॉर्क, बैकलैश और IP54 विनिर्देशन होते हैं।
🌡️
−25°C से +90°C — इनलाइन सीरीज़ के समान रेंज
EP-ZDWE का तापमान दायरा EP-ZDE के समान है - बेवल स्टेज द्वारा परिचालन सीमा पर कोई प्रतिबंध नहीं है। कोरियाई कोल्ड-चेन लॉजिस्टिक्स और फ्रोजन-फूड प्रोसेसिंग अनुप्रयोगों में EP-ZDWE का उपयोग -25°C पर बिना किसी निम्न-तापमान स्नेहन संशोधन के किया जा सकता है, ठीक उसी तरह जैसे इनलाइन श्रृंखला में होता है। +90°C परिवेश तापमान पर उच्च-तापमान पैकेजिंग लाइन इंस्टॉलेशन भी विनिर्देशों के अंतर्गत आते हैं।
🇰🇷
कोरियाई अनुप्रयोग अभियांत्रिकी — इनपुट दिशा और स्थान गणना
कोरिया एवर-पावर की कोरियाई एप्लीकेशन टीम ईपी-जेडडीडब्ल्यूई फ्रेम साइज चयन, इनपुट दिशा अनुशंसा, अक्षीय गहराई गणना (एल1 बनाम इनलाइन जेडडीई) और मोटर इनपुट फ्लेंज विनिर्देश - कोरियाई भाषा में प्रदान करती है। कोरियाई मशीन टूल और रोबोट ओईएम जो यह मूल्यांकन कर रहे हैं कि क्या ईपी-जेडडीडब्ल्यूई लक्षित मशीन क्रॉस-सेक्शन को सक्षम बनाता है, उनके लिए टीम ऑर्डर देने से पहले नि:शुल्क इंस्टॉलेशन एनवेलप तुलना (जेडडीडब्ल्यूई बनाम जेडडीई) प्रदान करती है।

ग्राहक समीक्षाएँ और एप्लिकेशन प्रतिक्रिया
5 ★
88%
4 ★
10%
≤3 ★
2%
हमारे कॉम्पैक्ट 5-एक्सिस वीएमसी पर ए-एक्सिस रोटरी टेबल के लिए 20:1 दो-चरण वाला EP-ZDWE-120 मोटर। पिछली पीढ़ी की मशीनों में EP-ZDE-120 मोटर का उपयोग किया जाता था, जिसमें मोटर लाइन में लगी होती थी - मोटर + गियरबॉक्स का संयोजन 321 मिमी था, जिसके कारण क्लीयरेंस प्रदान करने के लिए कॉलम का क्रॉस-सेक्शन 380 मिमी रखना पड़ता था। EP-ZDWE-120 के साथ, अक्षीय गहराई 277 मिमी (दो-चरण) है, मोटर पार्श्व रूप से बाहर निकलती है, और हमने कॉलम सेक्शन को घटाकर 300 मिमी कर दिया है। कॉलम की चौड़ाई में 80 मिमी की इस कमी से 60 यूनिट के उत्पादन में प्रति मशीन 22 किलोग्राम वजन की बचत हुई। कोरिया एवर-पावर ने 1 कार्य दिवस में हमारे मित्सुबिशी एचजी-एसआर मोटर के लिए इनपुट दिशा (मोटर-दाएं) और इनपुट फ्लेंज की पुष्टि की।
हमारे 6-एक्सिस कोलैबोरेटिव रोबोट के रिस्ट रोल जॉइंट के लिए 16:1 के अनुपात वाला EP-ZDWE-60 दो-चरणीय मोटर इस्तेमाल किया गया। हमारा लक्ष्य रिस्ट का बाहरी व्यास 72 मिमी था — जो इस टॉर्क स्तर पर इनलाइन मोटर से संभव नहीं था। EP-ZDWE-60 (Φ60 मिमी बॉडी) की मदद से हमने मोटर को फोरआर्म के ऊपर की ओर निकालते हुए 68 मिमी का रिस्ट बाहरी व्यास प्राप्त किया। शुरुआत में हमें <35 आर्कमिन के दो-चरणीय बैकलैश को लेकर चिंता थी, लेकिन हमारे पोजीशन कंट्रोल लूप ने बैकलैश के प्रभाव को कम कर दिया और जॉइंट की पोजीशनिंग हमारे ISO 9283 रोबोट एक्यूरेसी क्लास के अनुरूप है। बेवल और प्लेनेटरी दोनों चरणों पर आजीवन लुब्रिकेशन आवश्यक था — हमारा रोबोट खाद्य प्रसंस्करण वातावरण में काम करता है जहाँ रखरखाव की सुविधा सीमित है और ग्रीस से दूषित होना अनुपालन का मुद्दा है।
EP-ZDWE-80 को 10:1 के अनुपात में एक ही चरण में संकीर्ण कैरिज वाले फाइबर लेजर कटिंग सिस्टम के Y-अक्ष के लिए उपयोग किया गया — 3 मीटर × 8 मीटर कार्यक्षेत्र, 120 मीटर/मिनट की फीड दर। कैरिज प्रोफाइल की चौड़ाई 160 मिमी निर्धारित की गई थी (गाइड रेल केंद्रों द्वारा सीमित)। हमारे 400 वाट के यास्कावा मोटर के साथ एक इनलाइन EP-ZDE-80 अक्षीय रूप से 246 मिमी बाहर निकला हुआ होता — जिसके लिए एक चौड़े कैरिज और गाइड रेल के डिज़ाइन में बदलाव की आवश्यकता होती। EP-ZDWE-80 की L1 184.5 मिमी है, जिसमें मोटर 160 मिमी कैरिज के भीतर से पार्श्व रूप से बाहर निकलती है, और केबल श्रृंखला बिना किसी बाधा के अक्षीय रूप से चलती है। अब 18 महीने से प्रतिदिन 2 शिफ्टों में उत्पादन हो रहा है — बेवल स्टेज में कोई समस्या नहीं है, संचालन के पहले सप्ताह के बाद शोर कम हो गया।
अपने EP-ZDWE आवेदन के अनुभव को साझा करें। कोरिया एवर-पावर से संपर्क करें: [email protected]
कोरिया एवर-पावर रेंज में संबंधित उत्पाद
ईपी-जेडडीडब्ल्यूई, कोरिया एवर-पावर का समकोण इनपुट और गोल फ्लेंज वाला वेरिएंट है। सटीक ग्रहीय गियरबॉक्स ईपी श्रृंखला। निम्नलिखित श्रृंखलाएं ज्यामिति या अनुप्रयोग के आधार पर सीधे तौर पर संबंधित हैं।
ईपी-जेडडीई सीरीज — इनलाइन इनपुट, गोल फ्लेंज
EP-ZDWE का समाक्षीय इनलाइन संस्करण — समान गोल फ्लेंज आउटपुट और टॉर्क रेटिंग, मोटर आउटपुट शाफ्ट के साथ सीधी रेखा में। <8 आर्कमिन बैकलैश (ZDWE के लिए <25–30 आर्कमिन की तुलना में) और 96% एकल-चरण दक्षता (ZDWE के लिए 94% की तुलना में) प्रदान करता है। EP-ZDE का चयन तब करें जब अक्षीय स्थान अनुमति देता हो और न्यूनतम बैकलैश या अधिकतम दक्षता प्राथमिकता हो।
ईपी-जेडडीडब्ल्यूएफ सीरीज — समकोण इनपुट, वर्गाकार फ्लेंज
सभी प्रदर्शन विशिष्टताओं में EP-ZDWE के समान — समान समकोण बेवल इनपुट, समान टॉर्क रेटिंग, समान बैकलैश — लेकिन प्लेट-माउंट इंस्टॉलेशन के लिए एक वर्गाकार आउटपुट फ्लेंज (□60–□175 mm) के साथ। EP-ZDWF का चयन तब करें जब आपको EP-ZDWE की तरह अक्षीय स्थान की बचत और बोर-माउंट गोल फ्लेंज के बजाय फ्लैट-प्लेट बोल्ट-डाउन आउटपुट माउंटिंग की आवश्यकता हो।
ईपी-जेडडीएस सीरीज़ — उच्च कठोरता, भारी भार वहन क्षमता
जब 800 N·m का EP-ZDWE-160 पर्याप्त न हो, तो EP-ZDS इनलाइन इनपुट, वर्गाकार फ्लेंज, IP65 सुरक्षा, 130 N·m/आर्कमिन तक की मरोड़ कठोरता और 28,000 N के अधिकतम अक्षीय बल के साथ 1,800 N·m (190-फ्रेम) तक का बल प्रदान करता है। नोट: EP-ZDS केवल इनलाइन मोड में ही काम करता है; समकोण मोटर इनपुट वाले भारी भार के लिए, अनुकूलित कॉन्फ़िगरेशन हेतु कोरिया एवर-पावर से संपर्क करें।
अक्सर पूछे जाने वाले प्रश्नों
अतिरिक्त जानकारी
| संपादक | सीएक्सएम |
|---|
संबंधित उत्पाद
-

ईपी-एई सीरीज लार्ज फ्लेंज इनलाइन प्लेनेटरी गियरबॉक्स
-

ईपी-एडी सीरीज राउंड सर्कुलर फ्लेंज हाई-प्रिसिजन इनलाइन प्लेनेटरी गियरबॉक्स (ईपी-एडी047 से ईपी-एडी255)
-

ईपी-बीपीजीए सीरीज ऊर्जा-बचत प्लेनेटरी गियरबॉक्स — ए-टाइप फ्लेंज, मोटर-माउंटेड (ईपी-बीपीजीए040 से ईपी-बीपीजीए160)
-

BADR सीरीज राइट-एंगल हाई-प्रिसिजन प्लैनेटरी गियरबॉक्स — राउंड फ्लेंज (EP-BADR047 से EP-BADR255)
-

हाई-स्पीड सर्वो के लिए कॉन्सेंट्रिक प्रेसिजन प्लैनेटरी गियरबॉक्स — वीआर सीरीज
-

सीमित स्थान वाले ड्राइव के लिए समकोण ग्रहीय गियरबॉक्स — WPLE/WPLF श्रृंखला
-

चेन ट्रांसमिशन के लिए वीआर सीरीज हाई प्रिसिजन प्लैनेटरी गियरबॉक्स
-

औद्योगिक चेन ड्राइव के लिए पीएलएस प्रेसिजन प्लैनेटरी गियरबॉक्स


























