EP-ZDWE 시리즈 직각 입력 정밀 유성 기어박스

EP-ZDWE 시리즈는 90° 베벨 입력단과 원형 플랜지 출력단을 갖춘 직각 입력 정밀 유성 기어박스로, EP-ZDWE-60부터 EP-ZDWE-160까지 네 가지 프레임 크기로 제공됩니다. 정격 출력 토크는 12 N·m에서 최대 800 N·m까지이며, 백래시는 25~30 arcmin 미만, 단일단 효율은 94%입니다. 90° 베벨 입력단은 서보 모터를 출력축에 수직으로 배치하여 인라인 EP-ZDE 대비 전체 축 방향 설치 길이를 30~50% 단축시켜 줍니다. 따라서 EP-ZDWE는 한국산 소형 공작기계 헤드스톡, 로봇 관절, 공간 제약이 있는 서보 액추에이터 설계에 적합한 직각 정밀 유성 기어 감속기입니다. 3:1에서 512:1의 기어비 범위를 제공하며, 평생 윤활 및 IP54 보호 등급을 갖추고 있습니다.
EP-ZDWE 시리즈 — 직각 입력 정밀 유성 기어박스 | 원형 플랜지, 30–50% 축 방향 공간 절약형, 최대 800 N·m
EP-ZDWE는 내부 베벨 기어 단계를 통해 서보 모터를 출력축에 대해 90° 각도로 배치하여 인라인 방식 대비 모터와 기어박스 어셈블리의 전체 축 방향 길이를 30~50% 감소시킵니다. EP-ZDE 유성 기어박스출력 결과는 다음과 같습니다. 원형 장착 플랜지 — 출력측 설치는 EP-ZDE와 동일합니다. 직각 플랜지 버전은 다음을 참조하십시오. EP-ZDWF 시리즈.
그만큼 EP-ZDWE 시리즈 직각 입력 정밀 유성 기어박스 한국의 에버파워(Ever-Power)는 한국 서보 드라이브 설계에서 가장 흔한 공간 제약, 즉 모터 축과 출력축 축이 동축이 될 수 없다는 문제를 해결합니다. 소형 공작기계 헤드스톡, 로봇 손목 관절, 좁은 프로파일 컨베이어 드라이브, 다축 갠트리 시스템 등 출력축 뒤쪽의 공간이 제한적인 곳에서 EP-ZDWE는 모터를 출력축에 수직(좌/우 또는 상/하)으로 배치하여, 기존 인라인 모터가 차지하던 축 방향 공간을 확보합니다.
베벨 입력단은 인라인 EP-ZDE에 비해 기어 맞물림이 하나 더 추가되어 단일단 효율이 96%(EP-ZDE)에서 감소합니다. 94% 이는 한국 기계 설계자들이 설치 공간 축소를 위해 기꺼이 감수하는 사소한 절충안입니다. 출력축, 원형 플랜지, 베어링 배열, 수명 윤활 및 IP54 밀봉은 동일한 프레임 크기의 EP-ZDE와 동일하므로 출력 측 설치는 그대로 적용할 수 있습니다.
90° 경사 입력 - 축 공간 절약 방법 및 사용 시점

인라인 입력(EP-ZDE) — 전체 축 길이
[====모터====][===ZDE===]──▶ 출력
총 깊이 = 모터 + L1
예: 80프레임 1단계:
모터 ~120mm + L1 144mm
축 방향 깊이 약 264mm
직각 입력(EP-ZDWE) — 축 방향 절약
↓ 90° 경사
[=====ZDWE=====]──▶ 출력
총 깊이 = 기어박스 L1만 해당
예: 80프레임 1단계:
L1 축 방향 깊이만 184.5mm
모터가 옆으로 빠져나갑니다 → 저장됨!
EP-ZDWE가 올바른 선택인 세 가지 엔지니어링 상황
① 기계 외피의 출력부 뒤쪽 깊이에 제한이 있어 모터를 일렬로 설치할 수 없습니다.
한국산 소형 머시닝 센터 헤드스톡, 다이얼 인덱스 공작기계 회전축 유닛, 그리고 좁은 프로파일 컨베이어 드라이브는 기어박스 출력 플랜지 뒤쪽의 깊이에 구조적인 제약이 있는 경우가 많습니다. 1kW 서보 모터를 장착한 80프레임 인라인 EP-ZDE의 경우, 모터와 기어박스 어셈블리의 총 깊이가 260~290mm에 달하여 기계 컬럼이나 암 부분의 가용 공간을 초과합니다. 동일한 모터를 사용하는 EP-ZDWE-80은 축 방향 깊이를 기어박스 길이(184.5mm, 1단)만큼 줄여 모터가 기계 부분의 가용 폭 내에서 측면으로만 돌출되도록 설계되었습니다. 이러한 30~40%의 축 방향 깊이 감소는 한국 공작기계 설계자들이 소형 단일 컬럼 설계와 더 넓고 무거운 이중 컬럼 구조 중에서 선택하는 데 중요한 결정 요인이 되는 경우가 많습니다.
② 로봇 팔 단면적 제한으로 인해 인라인 모터 배치가 어렵습니다.
한국의 협동 로봇 및 산업용 로봇 손목 관절 설계자들은 근본적인 난제에 직면해 있습니다. 관절은 상당한 토크(일반적으로 손목에서 20~80N·m)를 전달해야 하지만, 동시에 로봇 팔의 외경(일반적으로 6kg 페이로드 로봇의 경우 60~100mm) 내에 위치해야 합니다. 이 토크 수준에서 인라인 모터와 유성 기어박스 조합은 로봇 링크 길이를 크게 늘려 로봇의 작업 공간과 동적 균형에 영향을 미칩니다. EP-ZDWE는 모터를 관절 축에 수직으로 배치하여 로봇 손목의 외경을 모터와 기어박스의 합산 깊이가 아닌 기어박스 본체 직경(Φ60~Φ80mm)으로 결정할 수 있도록 합니다. 수원과 성남의 한국 협동 로봇 제조업체들은 EP-ZDWE-60 및 EP-ZDWE-80을 적용하여 인라인 모터 구성 대비 링크 길이를 80~120mm 줄인 손목 관절 설계를 구현했다고 보고했습니다.
③ 다축 갠트리 시스템 - 무게중심 최적화를 위한 병렬 모터 배치
한국산 고속 레이저 절단 및 픽앤플레이스 갠트리 시스템은 X, Y, Z축을 하나의 소형 캐리지 어셈블리로 구동하며, EP-ZDWE 기술을 통해 세 개의 서보 모터를 캐리지 이동 방향과 평행하게 배치할 수 있다는 장점을 얻습니다. 즉, 모터를 앞뒤 방향이 아닌 측면 방향으로 배치함으로써 모터 질량을 캐리지 무게중심에 가깝게 집중시켜 모터 관성으로 인한 동적 모멘트 암을 줄이고 높은 가속도에서도 위치 정밀도를 향상시킵니다. 150m/min 이상의 이송 속도를 사용하는 한국산 레이저 절단 시스템의 경우, 직각 모터 배치로 인한 무게중심 개선은 모터 질량이 캐리지 돌출부를 확장시키는 일렬 배치에 비해 방향 전환 시 궤적 오차를 현저히 감소시킵니다.
EP-ZDWE와 EP-ZDE — 직각 입력과 인라인 입력 중 선택하기
| 표준 | EP-ZDE — 인라인 입력 | EP-ZDWE — 직각 입력 ★ |
|---|---|---|
| 모터-출력 방향 | 동축형 - 출력축과 일렬로 배치된 모터 | 90° — 모터가 출력축에 수직입니다. |
| 총 축 방향 설치 깊이 | 모터 길이 + 기어박스 L1 (예: 80프레임의 경우 약 264mm) | 기어박스 L1 전용 (예: 80프레임의 경우 184.5mm) — 30–50% 더 짧음 |
| 단일 단계 효율 | 96% — 베벨 스테이지 손실 없음 | 94% — 경사면 경사 단계에서 약 2%의 손실이 발생합니다. |
| 사용 가능한 프레임 크기 | 40 / 60 / 80 / 120 / 160 mm (5가지 크기) | 60 / 80 / 120 / 160 mm (4가지 사이즈 - 40 mm 프레임 없음) |
| 출력 플랜지 및 샤프트 | 동일 사양 - 원형 플랜지 D7, 샤프트 D4 h7, 프레임당 토크 정격 동일 | |
| 윤활/IP/온도 | 동일 제품 — 평생 밀봉 그리스 · IP54 · -25°C ~ +90°C · 모든 방향 사용 가능 | |
| 언제 선택할지… | 축 방향 공간은 충분하며, 효율성이 우선시되므로 가장 작은 프레임(40mm)이 필요합니다. | 축 방향 깊이가 제한적이며, 모터 방향 유연성이 필요하고, 컴팩트한 암/헤드스톡 설계가 요구됩니다. |
EP-ZDWE 시리즈 - 전체 기술 사양
① 정격 출력 토크(N·m) — 모든 프레임 크기 및 비율
| 비율 | 단계 | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| 3:1 | 1 | 12 | 40 | 80 | 400 |
| 4:1 | 1 | 16 | 50 | 110 | 450 |
| 5:1 | 1 | 16 | 50 | 110 | 450 |
| 8:1 | 1 | 15 | 45 | 100 | 400 |
| 10:1 | 1 | 12 | 40 | 80 | 305 |
| 9:1 | 2 | 40 | 100 | 210 | — |
| 12:1 | 2 | 40 | 100 | 210 | 700 |
| 16:1 | 2 | 44 | 120 | 260 | 800 |
| 20:1 | 2 | 44 | 120 | 260 | 800 |
| 25:1 | 2 | 40 | 110 | 230 | 700 |
| 32:1 | 2 | 44 | 120 | 260 | 800 |
| 40:1 | 2 | 40 | 110 | 230 | 700 |
| 64:1 | 2 | 40 | 100 | 210 | 700 |
| 60–512:1 | 3 | 40~44세 | 100~120개 | 210~260 | — |
② 적재 용량, 효율, 무게 및 속도
| 매개변수 | 단위 | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| 최대 방사력 | N | 450 | 900 | 2,100 | 6,000 |
| 최대 축력 | N | 225 | 450 | 1,050 | 3,000 |
| 효율성 — 1단계 | % | 94 (인라인 EP-ZDE - 베벨 스테이지용 96% 대비) | |||
| 효율성 — 2단계 | % | 92 | |||
| 효율성 — 3단계 | % | 88 | |||
| 무게 — 1단계 | kg | 1.7 | 4.4 | 12 | 36 |
| 무게 — 2단계 | kg | 1.9 | 5 | 14 | 40 |
| 무게 — 3단계 | kg | 2.1 | 5.5 | 16 | — |
| 비틀림 강성 — 1단계 | N·m/arcmin | 1.5 | 4.5 | 10 | 38 |
| 비틀림 강성 — 2단계 | N·m/arcmin | 2.5 | 6.5 | 13 | 43 |
| 소음 (공회전, 3,000rpm) | dB(A) | 65 | 68 | 70 | 70 |
| 최대 입력 속도 | 회전수 | 4,500 | |||
| 권장 입력 속도 | 회전수 | 3,000 | |||
③ Frame & Stage의 반발
| 단계 | 단위 | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| 반발 — 1단계 | 아크민 | <30 | <25 | <25 | <25 |
| 반발 — 2단계 | 아크민 | <35 | <30 | <30 | <30 |
| 반발 — 3단계 | 아크민 | <40 | <35 | <35 | — |
④ 일반 사양
| 매개변수 | 사양 |
|---|---|
| 작동 온도 | -25°C ~ +90°C |
| 보호 등급 | IP54(IEC 60529) - 먼지 유입 방지, 모든 방향에서 물 튀김 방지 |
| 매끄럽게 하기 | 평생 윤활 - 공장에서 밀봉되어 재윤활이 필요 없습니다. |
| 장착 방향 | 수평, 수직, 반전, 모든 경사각 |
| 모터 입력 방향 | 4방향 — 좌, 우, 상, 하 (출력 축에 대해 90°, 주문 시 지정) |
| 입력축 클램핑 유형 | S: 일체형 잠금 장치(기본값) · S1: 잠금 링 · S2: 키홈 + 클램핑 · K: 키홈 · A: 사용자 지정 |
| 출력축 공차 | h7 — 모든 프레임 크기 (EP-ZDE와 동일) |
| 정격 사용 수명 | 정격 부하에서 20,000시간 (L10 베어링 수명) |
| 순간 정지 토크 | 정격 출력 토크의 2배 |
EP-ZDWE 시리즈 - 기계적 치수 (단위: mm)
L12는 수직 입력 플랜지를 포함한 기어박스의 전체 높이로, 모터가 위쪽 또는 아래쪽으로 나올 때 중요한 치수입니다. L1은 출력 축을 따라 측정한 전체 길이로, 인라인 EP-ZDE 대비 축 방향 공간 절약량을 결정하는 치수입니다.
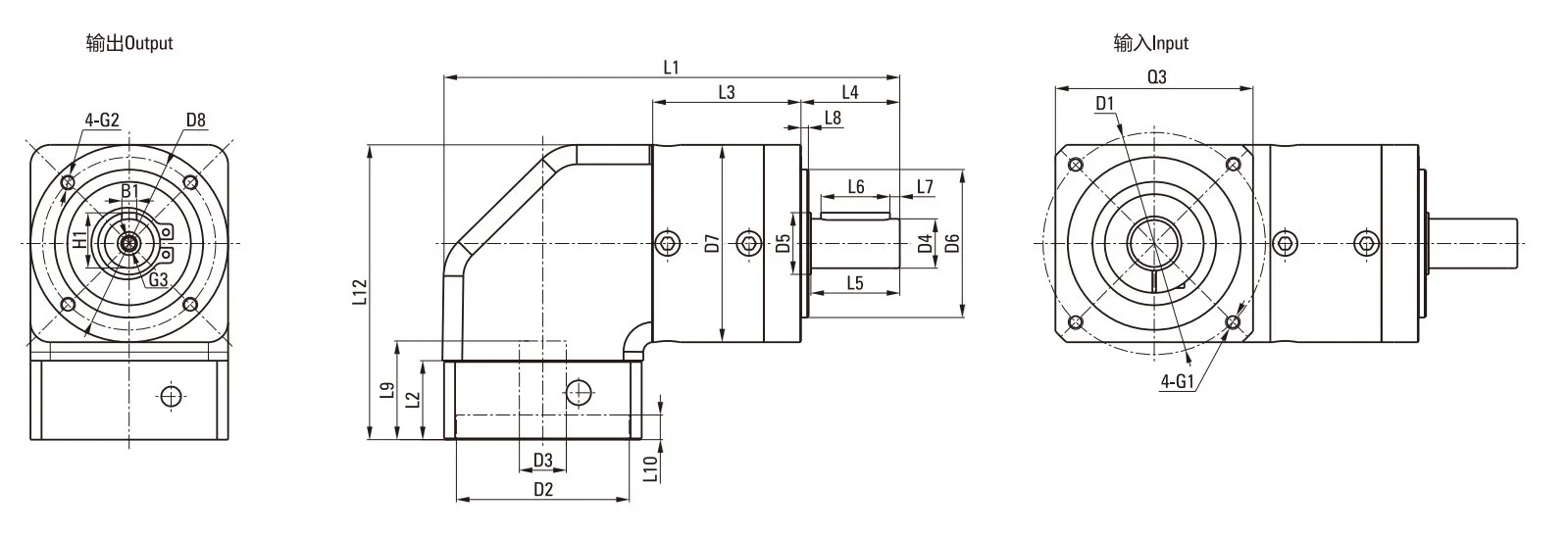
| 차원 | 60ZDWE | 80ZDWE | 120ZDWE | 160ZDWE |
|---|---|---|---|---|
| 전체 길이 L1 — 1단 (축 방향, 출력 측) | 150 | 184.5 | 249.2 | 368 |
| 전체 길이 L1 — 2단(축 방향, 출력 측) | 163 | 202.5 | 277 | 417.5 |
| 전체 높이 L12 (수직, 입력 플랜지 포함) | 93 | 119.5 | 167.5 | 229 |
| 출력축 직경 D4 | Φ14h7 | Φ20h7 | Φ25h7 | Φ40h7 |
| 본체 직경 D7 (원형 플랜지) | Φ60 | Φ80 | Φ115 | Φ160 |
| 입력 플랜지 길이 L2 | 20 | 32 | 38 | 66 |
| 입력 플랜지 Q3(정사각형) | □60 | □80 | □130 | □175 |
설치 가이드 — EP-ZDWE 직각 입력 시리즈
모터 입력 방향 — 4가지 방향 선택 가능
EP-ZDWE 입력 플랜지는 출력 샤프트 축을 기준으로 왼쪽, 오른쪽, 위쪽, 아래쪽의 4가지 방향으로 장착할 수 있습니다. 주문 시 필요한 입력 방향을 지정해 주십시오. 베벨 기어 단의 방향은 제조 과정에서 설정됩니다. 밀폐형 평생 윤활 시스템은 윤활 변경 없이 모든 4가지 입력 방향을 지원합니다.
단계별 설치 절차
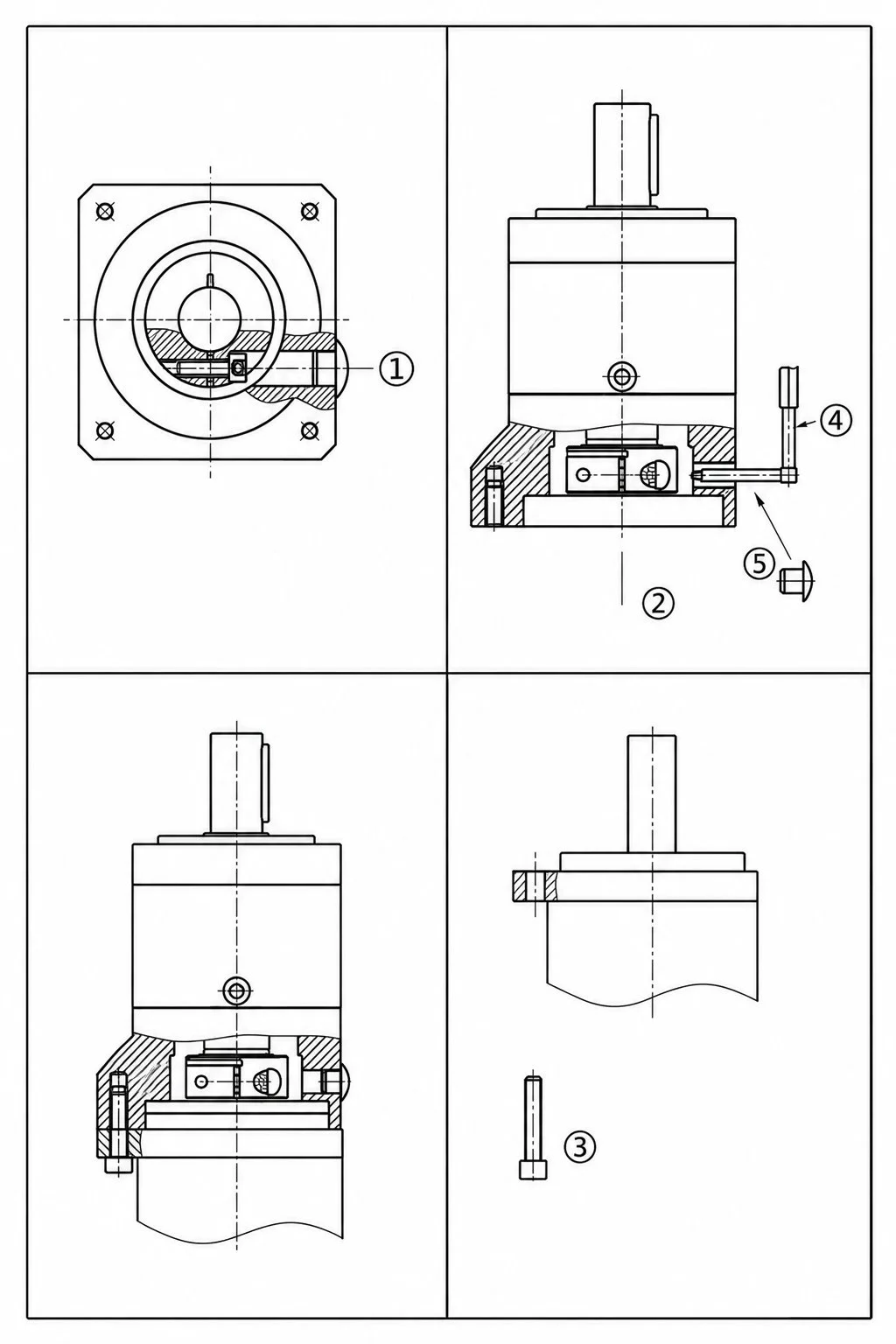
입력 방향 및 모델 코드를 확인하십시오.
EP-ZDWE 모델 코드에 입력 방향 사양(좌/우/상/하)이 포함되어 있는지 확인하십시오. 프레임 크기(60~160), 기어비, 출력 플랜지 D7(Φ60~Φ160 mm) 및 입력 플랜지 Q3이 서보 모터 전면과 일치하는지 확인하십시오. 설치 전에 L12(총 수직 높이)가 사용 가능한 기계 섹션 높이 내에 맞는지 확인하십시오.
모터 커플링 - 수직 클램핑 입력
서보 모터 샤프트를 기어박스의 베벨 스테이지 쪽에 있는 수직 입력 구멍에 모터 면이 입력 플랜지에 정확히 닿을 때까지 삽입합니다. 클램핑 입력(S형)은 모터 샤프트 키홈 유무에 관계없이 작동합니다. 잠금 나사를 십자형으로 고르게 조입니다. 모터 면과 입력 플랜지 사이에 축 방향 틈이 없도록 합니다. 틈이 있으면 모터 샤프트 길이가 입력 구멍 깊이보다 짧다는 것을 의미합니다. 필요한 경우 스페이서 링을 사용하십시오.
출력 플랜지를 기계에 장착
EP-ZDWE 원형 출력 플랜지(D7)는 EP-ZDE와 동일한 방식으로 장착됩니다. 스피곳을 기계 보어에 맞춰 밀착되도록 정렬한 후, 4개의 G2 장착 나사를 설치하고 균일하게 조입니다. 장착면의 평탄도는 0.02mm 이내여야 합니다. 조이기 전에 모터가 기계 구조물이나 케이블에 닿지 않고 지정된 입력 방향으로 돌출될 수 있는 충분한 여유 공간이 있는지 확인하십시오.
출력축 연결 및 케이블 배선
표준 절차에 따라 부하 커플링을 h7 출력 샤프트 D4에 연결하십시오(키 폭 B1: 동일 프레임 크기에 대한 ZDE 표 참조). 서보 모터 전원 및 엔코더 케이블은 갠트리 이동 또는 로봇 팔 움직임 중에 모터 커넥터에 케이블 장력이 발생하지 않도록 모터에서 멀리 떨어진 방향으로 배선하십시오. 90° 입력 배열은 일반적으로 케이블이 갠트리 이동 방향과 평행하게 나올 수 있도록 합니다. 설치 시 케이블 배선 경로를 계획하십시오.
하중 및 간극 검증
출력축 중심에서의 반경 방향 하중(L/2)이 최대 반경 방향 힘을 초과하지 않는지 확인하십시오. 최대 반경 방향 힘은 동일한 프레임 크기의 EP-ZDE와 동일합니다(예: 80프레임의 경우 900N). 모터 샤프트를 수동으로 한 바퀴 완전히 회전시켜 모터 본체가 갠트리 이동 범위 또는 로봇 관절 각도 범위 전체에 걸쳐 수직 방향으로 모든 기계 구조물에 간섭하지 않는지 확인하십시오. 특히 로봇 손목 관절의 경우, 관절 회전 중에 수직 방향의 모터가 호를 그리며 움직이기 때문에 이 부분이 중요합니다.
무부하 길들이기 및 경사각 조절 단계 예열
정격 입력 속도 ≤50%에서 무부하 상태로 30분간 운전하면서 베벨 기어에서 이상 소음이 발생하는지 모니터링하십시오. 처음 10~15분 동안 발생하는 가벼운 윙윙거리는 소리는 베벨 기어 접촉면이 길들이기 형상으로 마모되는 과정에서 발생하는 정상적인 현상입니다. 출력 베어링 영역과 베벨 기어 하우징의 온도를 모니터링하여 주변 온도 + 90°C를 초과하지 않는지 확인하십시오. 길들이기 후 시스템 백래시를 확인하고 기준값으로 기록하십시오.
⚠ 직각 입력 시 주의 사항: 모터 입력 방향은 주문 시 지정해야 합니다. 베벨 기어 방향은 제조 시 설정되므로 현장에서 변경할 수 없습니다. 입력 방향을 변경하기 위해 베벨 스테이지 하우징을 회전시키지 마십시오. 모터 설치 시 베벨 스테이지 입력축에 축 방향 힘을 가하지 마십시오. 모터 면을 정확하게 장착하십시오. 기계 이동 중 케이블 장력으로 인해 모터 커넥터가 당겨지는 것을 방지하기 위해 케이블을 잘 관리하십시오.
✔ 유지보수 불필요 - 경사면 가공 단계 포함: EP-ZDWE의 공장 밀봉형 평생 윤활 시스템은 하나의 밀폐형 하우징 내에서 베벨 기어 입력단과 유성 기어단을 모두 커버합니다. 별도의 베벨 기어 오일 주입이나 레벨 점검, 베벨 기어단 윤활을 위한 정기적인 작업이 필요 없습니다. 전체 기어박스(입력 베벨 기어와 출력 유성 기어)는 공장에서 주입된 평생 윤활유로 20,000시간의 정격 수명 동안 작동합니다.
적용 사례 — 한국 소형 드라이브 디자인에 사용되는 EP-ZDWE 직각 유성 기어박스
소형 CNC 공작기계 헤드스톡 - 회전축 구동
한국의 소형 5축 머시닝 센터 제조업체들은 회전축 뒤쪽의 컬럼 깊이가 기계 컬럼 단면적에 의해 제한되는 기계에서 A축 및 B축 회전 테이블 구동 장치로 EP-ZDWE-80 및 EP-ZDWE-120을 사용합니다. 일반적인 한국산 5축 소형 머시닝 센터의 컬럼은 A축 플랜지 면 뒤쪽으로 220~250mm의 사용 가능한 깊이를 가지고 있는데, 이는 1kW 서보 모터와 EP-ZDE-80을 합쳐 264mm로 설치하기에는 부족합니다. EP-ZDWE-80을 사용하면 축 방향 깊이를 184.5mm(1단)로 줄일 수 있으며, 모터는 사용 가능한 컬럼 폭 내에서 측면으로 나올 수 있습니다. 창원과 인천에 있는 한국의 머시닝 센터 OEM 업체들은 EP-ZDWE를 통해 제품 라인 전반에 걸쳐 컬럼 단면적을 80~100mm 줄일 수 있어 기계 무게와 가격을 낮출 수 있다고 보고했습니다.
협동 로봇 손목 및 팔꿈치 관절
외경 80mm 미만의 로봇 팔을 설계하는 한국 협동 로봇 제조업체들은 손목 회전(팔 축을 중심으로 한 회전) 구동에 EP-ZDWE-60을 사용합니다. 손목 관절에 인라인 모터와 유성 기어박스를 사용하는 방식은 모터가 손목 엔드 이펙터 장착 플랜지보다 돌출되게 하여 로봇 팔의 유효 길이를 늘리고 작업 깊이 대비 도달 거리를 줄이는 단점이 있습니다. EP-ZDWE-60은 모터를 손목 축에 수직으로 배치하여 로봇 팔의 외경이 모터 외경이 아닌 기어박스 본체(Φ60mm)에 의해 결정되도록 합니다. 사각 플랜지 직각 변형 플레이트 마운트 구조를 사용하는 손목 관절에 대해서는 다음을 참조하십시오. EP-ZDWF 시리즈.
고속 갠트리 레이저 절단 - 소형 Y축 캐리지
최대 4m 폭의 판금 절단 시스템용 협폭 Y축 캐리지를 설계하는 한국 파이버 레이저 절단 시스템 제조업체들은 캐리지 구동축에 EP-ZDWE-80 모터를 사용합니다. 협폭 캐리지는 Y축의 이동 질량과 관성 모멘트를 감소시켜 가속도를 높이고 사이클 시간을 단축합니다. 모터가 캐리지 측면으로 나오도록 설계되어 케이블 관리 체인을 Y축 이동 방향과 평행하게 설치할 수 있습니다. 이는 모터가 축 방향으로 돌출되어 케이블 체인이 모터 길이를 따라 설치해야 하는 인라인 구성 방식보다 훨씬 깔끔한 레이아웃을 제공합니다.
좁은 폭 컨베이어 및 분류 시스템
한국의 전자상거래 물류 및 소포 분류 시스템 통합업체들은 벨트 폭과 기어박스 깊이 비율이 제한된 좁은 컨베이어 구간의 구동 롤러에 EP-ZDWE-60을 사용합니다. 폭이 150mm인 컨베이어 구간에서 프레임으로부터 260mm 이상 돌출된 인라인 모터와 유성 기어박스를 사용하려면 더 큰 하우징이나 크로스빔이 필요합니다. EP-ZDWE-60은 컨베이어 프레임 깊이 내에 설치 가능하며, 모터는 인접한 컨베이어 모듈 사이에서 아래쪽 또는 측면으로 나옵니다. 이는 인천, 수원, 부천의 물류센터에 설치된 한국의 고밀도 분류 컨베이어 시스템에서 흔히 볼 수 있는 설계입니다.
다축 반도체 웨이퍼 이송 — 소형 암 조인트
300mm 웨이퍼 핸들링을 위한 대기압식 다축 웨이퍼 이송 로봇을 설계하는 한국 반도체 장비 제조업체들은 장비 전면 개방형 통합 포드(FOUP) 로드 포트 형상에 따라 로봇 팔 링크 길이가 제한되는 팔꿈치 및 어깨 관절에 EP-ZDWE-60을 사용합니다. 밀봉형 EP-ZDWE-60은 클린룸 입자 오염 평가(ISO 14644-1 Class 7)를 통과했으며, 공장에서 밀봉된 그리스는 정상 작동 중 베벨 스테이지에서 검출 가능한 입자를 생성하지 않습니다. EP-ZDWE의 백래시(≤30 arcmin, 60프레임)는 EP-ZDE(≤8 arcmin)에 비해 다소 높지만, 서보 피드백 루프가 폐루프 위치 제어를 통해 기어박스 백래시를 보정하는 위치 제어 웨이퍼 이송 로봇에서는 허용 가능한 수준입니다.
의료 영상 및 진단 장비 - 컴팩트 액슬 드라이브
한국의 의료기기 제조업체들은 CT 스캐너 갠트리 회전 구동 장치와 수술 로봇 팔 관절을 설계할 때, 환자 공간 확보 요건 및 IEC 60601 의료 전기 장비 외함 규격에 따라 갠트리 하우징의 외형이 제한되는 축에 EP-ZDWE-60 및 EP-ZDWE-80을 사용합니다. 수직 모터 배치 덕분에 갠트리 또는 팔의 단면적을 모터와 기어박스의 총 길이에 구애받지 않고 구조적 하중 요건을 충족하는 최소 부피로 최적화할 수 있습니다. 또한, 수명 기간 동안 밀봉 윤활이 가능하여 의료 장비 유지보수 주기 요건을 충족합니다.
품질 인증 및 테스트 표준
- ✔직각 입력 서보 기어박스 베벨 스테이지 기어 접촉 검증 완료 - 생산 배치별로 치면 맞물림 측정
- ✔정격 출력 토크의 ±3%에서 단위당 백래시 측정 - 모든 주문에 측정 인증서 제공
- ✔출하 전 각 장치에 대해 정격 출력 토크에서 최대 부하 토크 테스트를 실시합니다.
- ✔모든 생산 배치에 대해 IEC 60529에 따른 IP54 방수/방진 인증을 획득했습니다.
- ✔모든 납품 시 자재 증명서 및 치수 도면이 제공됩니다.

한국 엔지니어들이 에버파워 EP-ZDWE를 선택하는 이유는 무엇일까요?
📐
30–50% 축 방향 깊이 감소 — 더 작은 기계 설계 가능
모터와 기어박스를 합친 깊이가 기계의 컬럼 단면적, 암 직경 또는 캐리지 프로파일을 제한하는 요인이 되는 한국 기계 제조업체에게 EP-ZDWE는 더 작은 기계 설계를 가능하게 합니다. 30~50%의 축 방향 감속은 실제 기계 중량 감소, 구조 비용 절감으로 이어지며, 많은 경우 한국 OEM 시장에서 더욱 경쟁력 있는 제품 사양을 제공합니다.
🔄
EP-ZDE와 동일한 출력 — 출력 측 인터페이스는 직접 전달 방식입니다.
한국 엔지니어들이 EP-ZDE 규격에서 EP-ZDWE 규격으로 기계 설계를 이전할 때, 모터 장착 인터페이스만 업데이트하면 됩니다. 출력축 직경 D4, 원형 플랜지 D7, 장착 구멍 패턴, 토크 정격은 프레임 크기별로 동일합니다. 출력측 기계 도면, 커플링 사양, 출력 베어링 지지 계산도 변경 없이 그대로 사용할 수 있습니다.
🔒
평생 윤활 기능으로 베벨 기어 전체에 윤활이 제공되므로 별도의 베벨 오일 관리가 필요 없습니다.
많은 직각 기어박스는 베벨 기어용으로 별도의 오일 저장소를 사용하므로 주기적인 오일 레벨 점검 및 교체가 필요합니다. EP-ZDWE의 밀봉형 평생 윤활유는 베벨 입력단과 유성 출력단을 하나의 밀폐된 하우징 내에 모두 도포하여 베벨 기어를 포함한 전체 기어박스에 20,000시간 이상 무윤활 유지보수를 제공합니다. 이는 현장 유지보수 접근이 제한적인 한국의 로봇 및 컨베이어 OEM 업체들에게 특히 중요한 장점입니다.
🎯
입력 방향 4가지 — 왼쪽, 오른쪽, 위, 아래
EP-ZDWE는 출력축 축을 기준으로 모터 입력 방향을 4단계로 설정할 수 있습니다. 한국의 기계 설계 전문가들은 특정 설치 환경에 맞춰 케이블 배선, 무게중심, 서비스 접근성을 최적화할 수 있으며, 경쟁사의 직각 기어 감속기처럼 단일 모터 방향으로만 제한되지 않습니다. 4단계 입력 방향 모두 동일한 밀폐형 윤활 시스템을 사용하며, 토크, 백래시, IP54 등급을 동일하게 유지합니다.
🌡️
-25°C ~ +90°C — 인라인 시리즈와 동일한 범위
EP-ZDWE의 온도 범위는 EP-ZDE와 동일하며, 경사 절단 단계로 인한 작동 범위 제한이 없습니다. 한국의 냉동 물류 및 냉동 식품 가공 분야에서는 인라인 시리즈와 마찬가지로 저온 윤활 개조 없이 EP-ZDWE를 -25°C에서 사용할 수 있습니다. 또한, 주변 온도가 +90°C에 달하는 고온 포장 라인 설치에도 적합합니다.
🇰🇷
한국 응용공학 - 입력 방향 및 공간 계산
에버파워 한국 애플리케이션 팀은 EP-ZDWE 프레임 크기 선정, 입력 방향 추천, 축 방향 깊이 계산(L1 vs 인라인 ZDE), 모터 입력 플랜지 사양 등을 한국어로 제공합니다. EP-ZDWE가 목표 기계 단면에 적용 가능한지 평가하는 한국 공작기계 및 로봇 OEM 업체를 위해, 해당 팀은 주문 전 설치 가능 영역 비교(ZDWE vs ZDE) 서비스를 무료로 제공합니다.

고객 리뷰 및 애플리케이션 피드백
5 ★
88%
4 ★
10%
≤3 ★
2%
당사의 소형 5축 VMC의 A축 회전 테이블에는 EP-ZDWE-120 20:1 2단 기어박스가 장착됩니다. 이전 세대 장비에는 모터가 일렬로 배치된 EP-ZDE-120이 사용되었는데, 모터와 기어박스를 합친 길이가 321mm에 달해 여유 공간 확보를 위해 컬럼 단면적이 380mm에 이를 수밖에 없었습니다. EP-ZDWE-120을 사용하면 축 방향 깊이가 277mm(2단)로 줄어들고 모터가 측면으로 나오게 되어 컬럼 단면적이 300mm로 감소합니다. 컬럼 폭이 80mm 감소함으로써 60대 생산 기준으로 장비당 22kg의 무게를 절감할 수 있었습니다. 한국의 Ever-Power는 당사의 Mitsubishi HG-SR 모터의 입력 방향(모터 우측)과 입력 플랜지를 단 하루 만에 확인해 주었습니다.
EP-ZDWE-60 모터를 16:1 2단 기어로 당사의 6축 협동 로봇 손목 롤 조인트에 사용했습니다. 목표 손목 외경은 72mm였는데, 이 토크 수준에서 인라인 모터로는 불가능했습니다. EP-ZDWE-60(Φ60mm 본체)을 사용함으로써 모터를 팔뚝 위쪽으로 빼내어 68mm의 손목 외경을 구현할 수 있었습니다. 초기에는 35 arcmin 미만의 2단 기어 백래시에 대한 우려가 있었지만, 위치 제어 루프가 백래시를 보정하여 관절 위치가 ISO 9283 로봇 정확도 등급 기준을 충족했습니다. 베벨 기어와 유성 기어 모두에 수명 윤활을 적용하는 것이 필수적이었습니다. 당사 로봇은 유지보수 접근이 제한적이고 그리스 오염이 규정 준수 문제인 식품 가공 환경에서 작동하기 때문입니다.
EP-ZDWE-80은 좁은 캐리지 파이버 레이저 절단 시스템의 Y축에 10:1 단일 스테이지로 사용되었으며, 작업 영역은 3m × 8m, 이송 속도는 120m/min입니다. 캐리지 프로파일 폭 제한은 160mm(가이드 레일 중심 간격에 의해 제한됨)였습니다. 당사의 400W 야스카와 모터를 장착한 인라인 EP-ZDE-80을 사용할 경우 축 방향으로 246mm 돌출되어 더 넓은 캐리지가 필요하고 가이드 레일 설계도 변경해야 합니다. EP-ZDWE-80은 L1이 184.5mm이며 모터가 160mm 캐리지 내에서 측면으로 돌출되어 케이블 체인이 축 방향으로 장애물 없이 설치됩니다. 현재 18개월 동안 하루 2교대로 가동 중이며, 경사 절단 스테이지에는 문제가 없고 소음도 첫 주 가동 후 안정화되었습니다.
EP-ZDWE 신청 경험을 공유해 주세요. 한국 에버파워에 문의하세요: [email protected]
한국 에버파워 제품군의 관련 제품
EP-ZDWE는 한국 Ever-Power 제품군의 직각 입력, 원형 플랜지 변형 모델입니다. 정밀 유성 기어박스 EP 시리즈. 다음 시리즈들은 기하학적 형태 또는 응용 분야에서 직접적인 관련이 있습니다.
EP-ZDE 시리즈 - 인라인 입력, 원형 플랜지
EP-ZDE는 동축 인라인 버전으로, 동일한 원형 플랜지 출력 및 토크 정격을 제공하며 모터가 출력축과 일렬로 배치됩니다. 8 arcmin 미만의 백래시(ZDWE는 25~30 arcmin 미만)와 96%의 단일 단계 효율(ZDWE는 94%)을 제공합니다. 축 방향 공간이 허용되고 최소 백래시 또는 최대 효율이 우선시될 경우 EP-ZDE를 선택하십시오.
EP-ZDWF 시리즈 — 직각 입력, 사각 플랜지
EP-ZDWF는 모든 성능 사양에서 EP-ZDWE와 동일합니다. 동일한 직각 베벨 입력, 동일한 토크 정격, 동일한 백래시를 제공하지만, 플레이트 장착 설치를 위한 사각형 출력 플랜지(□60–□175 mm)가 특징입니다. EP-ZDWE의 축 방향 공간 절약 효과와 보어 마운트 원형 플랜지 대신 평판 볼트 고정식 출력 장착이 필요한 경우 EP-ZDWF를 선택하십시오.
EP-ZDS 시리즈 — 높은 강성, 무거운 하중
800 N·m의 EP-ZDWE-160이 충분하지 않을 경우, EP-ZDS는 최대 1,800 N·m(190프레임)의 토크를 제공하며, 인라인 입력, 사각 플랜지, IP65 보호 등급, 최대 130 N·m/arcmin의 비틀림 강성 및 최대 28,000 N의 축 방향 하중을 지원합니다. 참고: EP-ZDS는 인라인 입력만 가능하며, 직각 모터 입력이 필요한 고하중의 경우 한국 에버파워에 문의하여 맞춤형 구성을 받으시기 바랍니다.
자주 묻는 질문
추가 정보
| 편집자 | Cxm |
|---|
관련 상품
-

EP-ADS 시리즈 원형 플랜지 인라인 유성 기어박스 - 5가지 목표 기어비 (EP-ADS047 ~ EP-ADS255)
-

EP-AE 시리즈 대형 플랜지 인라인 유성 기어박스
-

EP-AD 시리즈 원형 플랜지 고정밀 인라인 유성 기어박스 (EP-AD047 ~ EP-AD255)
-

EP-BAF 시리즈 고정밀 유성 기어박스 - 고강성 출력축 (EP-BAF042 ~ EP-BAF220)
-

BADR 시리즈 직각 고정밀 유성 기어박스 - 원형 플랜지 (EP-BADR047 ~ EP-BADR255)
-

일반 산업용 표준 직각 유성 기어박스 — WPL 시리즈 (WPL40–WPL120)
-

서보 모터용 고정밀 유성 기어박스 — PLE/PLF 시리즈
-

체인 구동 시스템용 EPL 이중 축 유성 기어박스


























