BADRシリーズ 直角高精度遊星歯車減速機 - 丸フランジ(EP-BADR047~EP-BADR255)
")
EP-BADRシリーズは、90度ベベル入力段と円形フランジ出力段を備えた直角高精度遊星歯車減速機で、EP-BADR047からEP-BADR255までの7種類のフレームサイズが用意されています。定格出力トルクは19 N·mから2,000 N·mまでで、精度等級のバックラッシュは≤3分角、総合効率は≥93%(単段)です。角フランジのEP-BADに加え、BADRは単段減速比を14:1と20:1、2段減速比を200:1まで拡張し、円形フランジ出力段により円筒形ハウジングや回転ジョイントへの取り付けが容易になるため、韓国エバーパワーEPシリーズの中で最も幅広い減速比を持つ直角高精度減速機となっています。
EP-BADRシリーズ - 直角丸フランジ高精度遊星歯車装置
の EP-BADRシリーズ高精度遊星歯車装置 3つの機能を1つのユニットに統合しています。 90°直角出力 精密なベベル入力ステージを介して、 円形フランジ出力 円筒穴取り付け用、 最も広いギア比範囲 韓国エバーパワー社の直角製品ファミリーには、単段式で最大20:1、二段式で最大200:1の製品があります。直角トルク方向転換、円形ボルトサークル取り付け、高減速比という3つの特性を同時に必要とする機械設計において、最適な選択肢となります。
EP-BADR047からEP-BADR255までの7つのフレームサイズすべてにおいて、P1バックラッシュ仕様は 単段式で3分角以下、二段式で5分角以下 出力軸で維持される(ベベル段の寄与を含む)。ユニット全体の効率は ≥93%単段階および≥90%二段階同等のギア比を持つウォームギアをはるかに凌駕する性能を発揮します。フルボディ硬化合金鋼ギア、ANSYSで検証済みの歯形補正、一体型プラネタリーキャリアと出力シャフトにより、韓国のAGV、協働ロボット、自動化機器メーカーが求める長期的なバックラッシュ安定性を実現しています。
EP-BADRが適合する場所 — 直角丸フランジマトリックス
韓国エバーパワーの直角遊星歯車装置と丸フランジ型は2×2の選択マトリックスを形成する。EP-BADRは、以下のセルを占める。 両方 直角出力と円形フランジ取り付け ― 最も特殊な構成であり、利用可能な比率範囲が最も広い構成です。
| 角型フランジ出力 | 丸型フランジ出力 | |
|---|---|---|
| インライン(0°)出力 | EP-BAB i=3~100 |
EP-BABR i=3~200 |
| 直角(90°)出力 | EP-BAD i=4~100 |
★ EP-BADR i=4~200 |
EP-BADRとEP-BAD ― 主な違い
| 基準 | EP-BADR ★ | EP-BAD |
|---|---|---|
| 出力方向 | 90°直角 | 90°直角 |
| 出力フランジ | 丸い円形のボルトサークル | 角フランジ |
| 単段比 | 4, 5, 6, 7, 8, 10, 14, 20 | 4, 5, 6, 7, 8, 10 |
| 2段階最大比率 | 200:1 | 100:1 |
| バックラッシュP1 / 効率 | ≤3'/≤5' · ≥93%/≥90% | ≤3'/≤5' · ≥93%/≥90% |
| 最適 | 円筒穴、回転ジョイント、高比直角ドライブ | フラットベッド、標準ボルトパターン |
お客様の用途では、直角出力に加え、以下のいずれか、または複数が必要となります。(a)円筒形ハウジングへの円形ボルトサークル取り付け、(b)単段比14:1または20:1、(c)2段比100:1以上。比が100:1以下の標準的な角型フランジで十分な場合は、EP-BADがより簡単な選択肢となります。
EP-BADR047~EP-BADR255 - 直角遊星歯車機構の完全な仕様
| 共通仕様 — すべてのEP-BADRフレーム | |
|---|---|
| 出力方向 | 90°直角(ベベル入力+遊星減速) |
| 出力フランジ | 円形ボルトサークル(出力軸と同心) |
| バックラッシュP1 | 単段式:3分角以下 二段式:5分角以下(合計、面取りを含む) |
| バックラッシュP2 | 単段式:8分角以下 · 二段式:12分角以下 |
| 単段比 | 4, 5, 6, 7, 8, 10, 14, 20 |
| 2段階比率 | 20, 25, 30, 35, 40, 50, 60, 70, 80, 100, 140, 200 |
| 総合効率 | 単段階 ≥93% · 二段階 ≥90% |
| 騒音(3,000rpm、無負荷、1m) | <65 dB(A) |
| 最大トルク(緊急停止時) | 定格出力トルクの3倍(瞬間値) |
| 最大加速トルク | 定格トルク60%(T₂s = 0.6 × T₂Nor) |
| 動作温度 | 0℃~+40℃ |
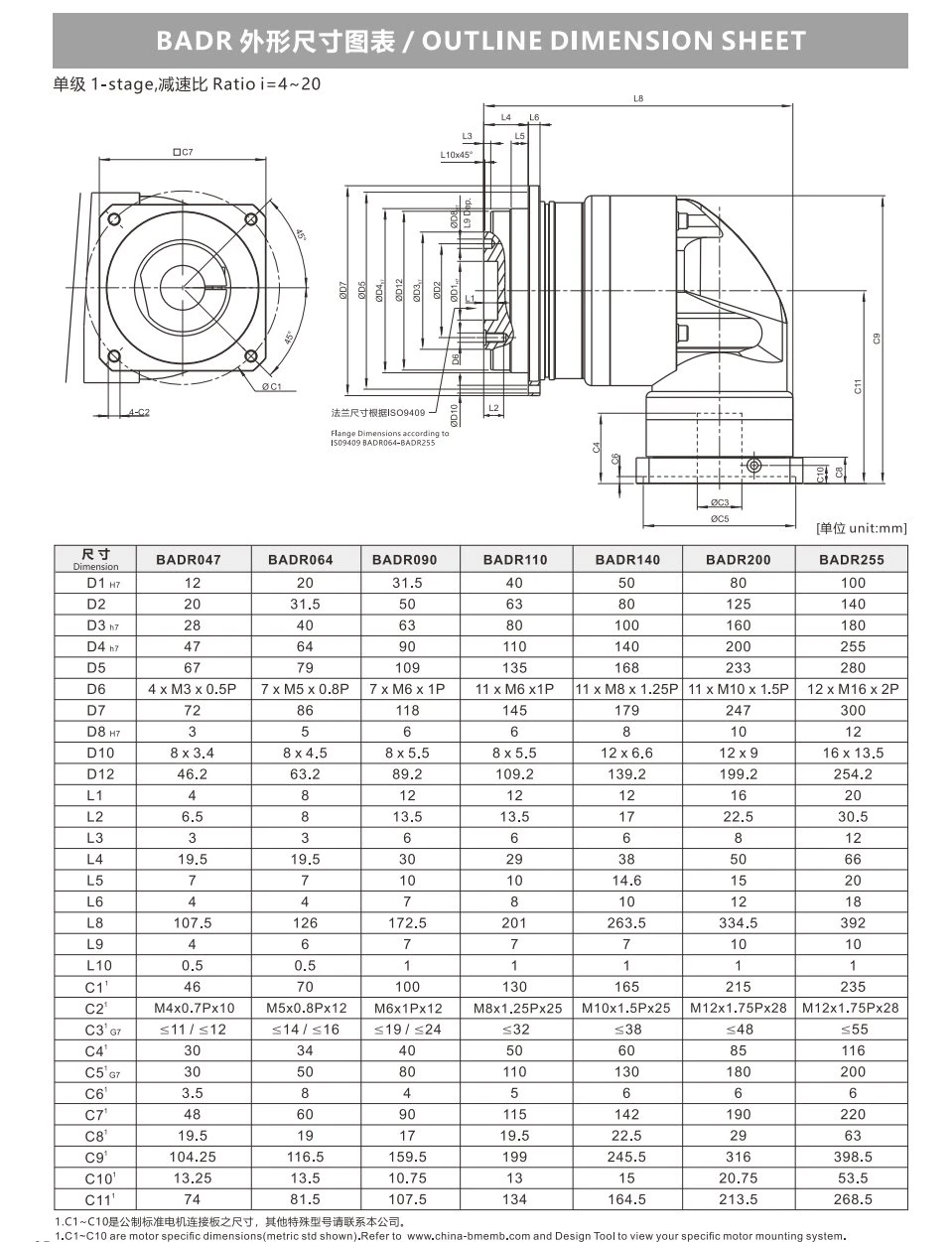
定格出力トルク(N・m)— 単段式(i = 4~20)
| 比率 | BADR047 | BADR064 | BADR090 | BADR110 | BADR140 | BADR200 | BADR255 |
|---|---|---|---|---|---|---|---|
| i=4 | 19 | 48 | 130 | 270 | 560 | 1,100 | 1,700 |
| i=5 | 22 | 60 | 160 | 330 | 650 | 1,200 | 2,000 |
| i=6 | 20 | 65 | 150 | 310 | 600 | 1,100 | 1,900 |
| i=7 | 19 | 50 | 140 | 300 | 550 | 1,100 | 1,800 |
| i=8 | 17 | 45 | 120 | 260 | 500 | 1,000 | 1,600 |
| i=10 | 14 | 60 | 160 | 325 | 650 | 1,200 | 2,000 |
| i=14 ★ | — | 42 | 140 | 300 | 550 | 1,100 | 1,800 |
| i=20 ★ | — | 40 | 100 | 230 | 450 | 900 | 1,500 |
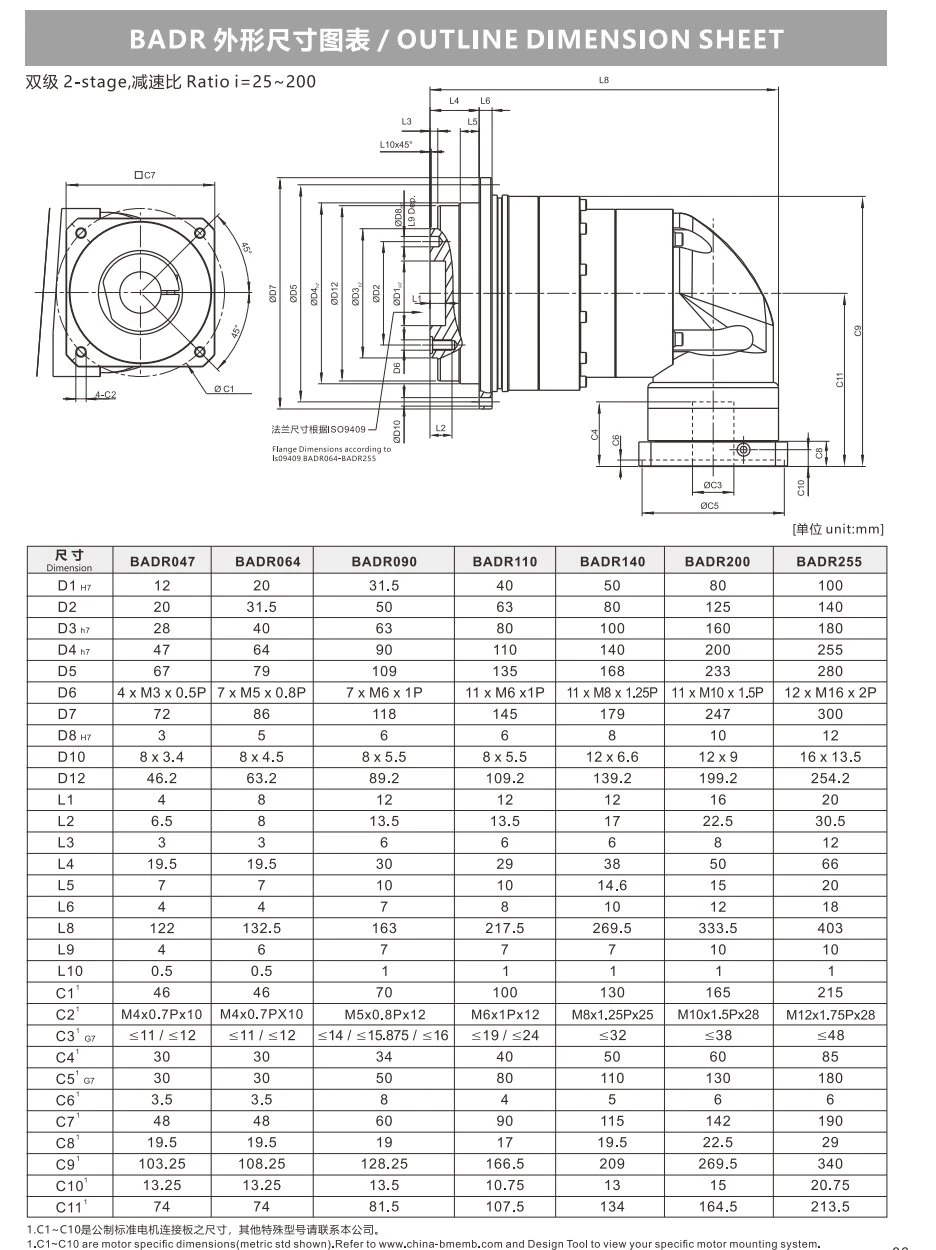
定格出力トルク(N・m)— 2段式(i = 25~200)
| 比率 | BADR047 | BADR064 | BADR090 | BADR110 | BADR140 | BADR200 | BADR255 |
|---|---|---|---|---|---|---|---|
| i=25 | 22 | 60 | 160 | 330 | 650 | 1,200 | 2,000 |
| i=30 | 20 | 55 | 150 | 310 | 600 | 1,100 | 1,900 |
| i=40 | 19 | 48 | 130 | 270 | 560 | 1,100 | 1,700 |
| i=50 | 22 | 60 | 160 | 330 | 650 | 1,200 | 2,000 |
| i=70 | 19 | 50 | 140 | 300 | 550 | 1,100 | 1,600 |
| i=100 | 17 | 45 | 120 | 260 | 500 | 1,000 | 1,600 |
| i=140 ★ | — | — | — | — | — | — | 利用可能 |
| i=200 ★ | — | — | — | — | — | — | 利用可能 |
★ = EP-BADR専用 — EP-BADでは利用できません。i=140およびi=200におけるトルクの全データについては、Korea Ever-Powerまでお問い合わせください。
フレームごとの最大定格入力速度(RPM)
| フレーム | 047 | 064 | 090 | 110 | 140 | 200 | 255 |
|---|---|---|---|---|---|---|---|
| 最大回転数 | 5,000 | 5,000 | 5,000 | 4,000 | 4,000 | 3,000 | 2,000 |
モデル指定ガイド — EP-BADR部品番号
丸フランジ
90 mm
単段式(BADRのみ)
≤3分角(合計)
(モーター適合)
| 位置 | コード | 意味 |
|---|---|---|
| シリーズ | EP-BADR | 韓国エバーパワー製、90°直角出力、円形フランジ |
| フレームサイズ | 047/064/090/110/140/200/255 | ハウジング直径(mm) |
| ギア比 | 4~10、14、20 / 20~200 | 単段式:4,5,6,7,8,10,14,20 · 二段式:20,25,30,35,40,50,60,70,80,100,140,200 |
| バックラッシュ等級 | P1 / P2 | P1: ≤3'/≤5' (シングル/ツーステージ、ベベルを含む合計) · P2: ≤8'/≤12' |
| 入力フランジ | T1 / T2 | 入力アダプタプレートタイプ — 正しい適合のためにサーボモータモデルを指定してください |
用途 ― 直角出力と丸フランジ取り付けが交わる場所
高減速比の円筒形ハウジングAGVステアリング
AGV全方向駆動モジュールは、駆動輪の上で回転する円筒形のピボットハウジング内にステアリングアクチュエータをパッケージ化しています。丸フランジ直角ギア減速機は、円形のボルトサークルがボアショルダーにクランプされ、このハウジングに直接収まります。一方、90°ベベルステージは、サーボモーターがモジュールの高さ制限を超えて垂直に突き出ることなく、床と平行に水平に保たれます。非常に遅いステアリング掃引速度で高い減速比が必要な場合、BADRの200:1 2段式減速機は、モジュールの高さに60~80mmを追加する追加のウォームステージを不要にします。 CVドライブシャフト 差動駆動式AGVの車輪オフセット構成の場合。

クロスアクシスケーブルパススルー付き協働ロボットジョイント
協働ロボットの関節構成によっては、電源ケーブルと信号ケーブルを関節軸(リンク方向に対して垂直)に通すため、中空軸の直角駆動装置が必要になります。EP-BADRの丸型フランジは中空円筒形ハウジングに取り付けられ、ケーブルはボルトサークルの中心を通ります。ベベルステージはモータトルクを90°回転させて中空出力軸に伝達します。i=14およびi=20の単段オプションは、ロボットの定格ペイロード範囲内でエンドエフェクタの到達範囲が1ミリメートルでも影響を受ける協働ロボット手首関節にとって重要なコンパクトな軸長を提供します。
ソーラートラッカー用コラムドライブ(円柱取り付け式)
丸鋼管柱上に構築された単軸ソーラートラッカーは、柱の穴の内側に傾斜アクチュエータを取り付けます。EP-BADRの丸フランジは、トランジションブラケットなしで柱の穴フランジに直接ボルトで固定され、90°出力は垂直に取り付けられたモーターからトラッカーのトルクチューブを水平方向に駆動します。EP-BADRは、50:1~100:1の比率で、韓国の公益事業規模の太陽光発電設備の風荷重定格全体にわたって必要な傾斜トルクを提供し、密閉潤滑ユニットはトラッカーの25年の設計寿命の間、現場でのメンテナンスが不要です。二次電力分割は ベベルステージ これにより、1つの駆動ユニットでトラッカーアレイの両側を同時に駆動することが可能になります。
アプリケーションリファレンス
- ✦円筒形AGV駆動モジュール
- ✦コボット社製クロスアクシスケーブルジョイント
- ✦ソーラートラッカー用コラムドライブ
- ✦円柱型ガントリー軸
- ✦中空軸回転アクチュエータ
- ✦スタッカークレーン用ラウンドマスト駆動装置
- ✦医用画像診断研修
- ✦低速コンベア直角駆動
- ✦建築ファサードアクチュエータ
円柱型スタッカークレーンマスト
円形断面のマストスタッカークレーンは、水平移動駆動装置をマストチューブ内部に配置できます。この高精度遊星歯車機構は円形マストチューブの穴に直接収まり、90°出力はマスト軸に沿って取り付けられたモーターから移動ラックを駆動します。これは、マストの断面積を増やしてラックレーンの密度を低下させる外部ブラケットを使用しないと、角フランジ直角ユニットでは不可能なレイアウトです。
高比率低速コンベヤ直角駆動装置
サーボモーターから3~15rpmの出力を必要とするコンベヤベルト駆動装置では、駆動軸をモーターに対して垂直に回転させるための直角出力と、高い減速比の両方が必要となることがよくあります。EP-BADRは、140:1~200:1の2段構成で、これらの要件を1つの密閉型直角遊星歯車減速機で満たします。これにより、従来の最大100:1の直角ユニットでこれらの出力速度を達成するために必要となるチェーンまたはベルトの中間段が不要になります。
医用画像撮影用ガントリーの回転
CTスキャナーや放射線治療用ガントリーの回転駆動装置には、円形のガントリーリング穴に組み込める、コンパクトで振動のない密閉型減速機が必要です。EP-BADRの円形フランジ形状と90°出力は、この構造に直接適合します。出力軸と同心円状の円形ボルトパターンは、角フランジの直角ユニットで発生する偏心オフセットなしに、ガントリーリングベアリングインターフェースと一体化します。

フレームサイズ選択 — EP-BADR047~EP-BADR255
047
EP-BADR047 — 小型直角丸ボルト(最大22 N·m、5,000 rpm)
最小サイズの直角丸フランジフレーム。最大トルク22N・m(i=5)。コンパクトなAGVステアリングサブモジュール、小型協働ロボット手首クロス軸ジョイント、計測機器レベルの高精度位置決めを実現。50~200Wのサーボモーターに対応。
064
EP-BADR064 — 軽量直角丸型ボルト(最大トルク65N・m・5,000rpm)
最大65 N·m (i=6)。軽量AGVステアリングモジュール、小型協働ロボット用エルボークロスアクシスジョイント、i=14およびi=20の単段タイプが利用可能。100~750Wのサーボモーターに対応。
090
EP-BADR090 — 標準直角丸ボルト ★ 最大160 N·mまで対応
最大 160 N·m (i=5/10)。BADR シリーズで最も一般的に注文される直角遊星歯車機構フレーム。5~10 kg のペイロードを持つ協働ロボットのクロス軸ジョイント、500 kg クラスの AGV ステアリングモジュール、ソーラートラッカーのコラムドライブなどに対応。i=20 の単段と最大 200:1 の二段が利用可能。最大 5,000 rpm の 200~1,500 W サーボモーターに対応。
110
EP-BADR110 — 中型直角丸ボルト(最大トルク330N·m、回転数4,000rpm)
最大330N・m。 最大入力回転数:4,000rpm。 1,000kgクラスのAGV(無人搬送車)の操舵、円柱型ガントリー横方向駆動、中空軸回転アクチュエータによる中規模自動化。750~2,200Wのサーボモーターに対応。
140
EP-BADR140 — 重量級直角丸ボルト(最大トルク650N·m、回転数4,000rpm)
最大トルク650N・m。2,000kgクラスのAGVステアリング、大型中空軸アクチュエータ、大規模太陽光発電トラッカー駆動装置に対応。1,500~3,500Wのサーボモーターと互換性があります。
200
EP-BADR200 — 高出力直角丸型(最大トルク1,200 N·m、回転数3,000 rpm)
最大1,200 N·m。 最大入力回転数:3,000rpm。 高耐久性丸マストAS/RSスタッカークレーン駆動装置、大型中空軸アクチュエータ。下流ウォーム統合 自己ロック式ウォームステージ 垂直方向の荷重保持用。2,200~5,500Wのサーボモーターに対応。
255
EP-BADR255 — 最大フレーム(最大トルク2,000 N·m、トルク比200:1、回転数2,000 rpm)
最大直角丸フランジフレーム。最大2,000 N·m (i=5/10/50)、200:1の2段構成が可能で、単一の直角ユニットで3,000 rpmの入力から15 rpmの出力を実現します。 最大入力回転数:2,000rpm。 大型AGV用全方向旋回駆動装置、工業用回転窯用直角プリドライブ、重量級中空軸アクチュエータ。3,500~7,500Wのサーボモーターに対応。

品質認証、工場および試験基準
- ✔ユニットあたりの総バックラッシュを測定 — P1/P2検証済み(ベベルギア+プラネタリーギア)
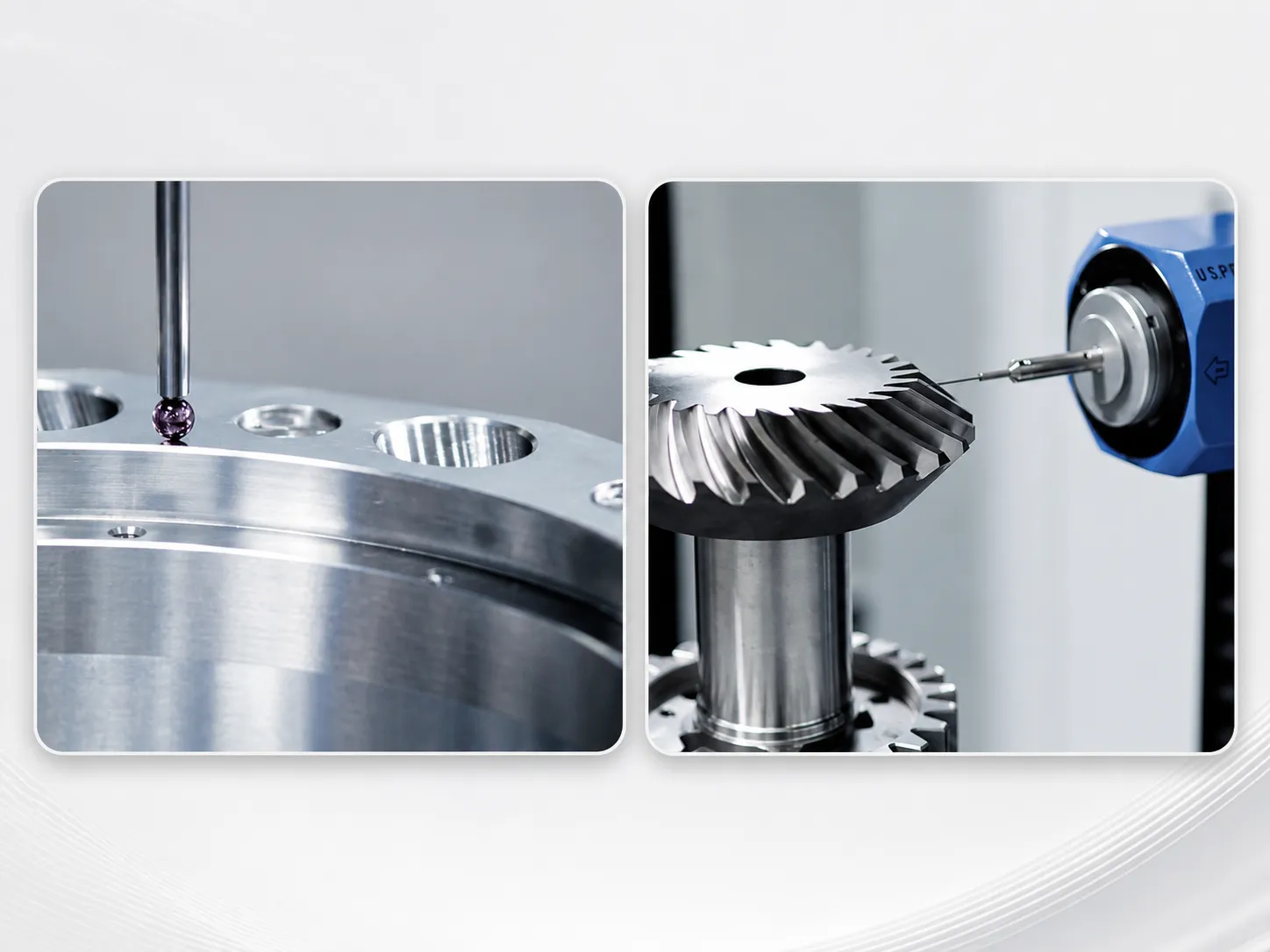
- ✔直角の垂直性とフランジの同心度(いずれもCMMで検証済み)
- ✔定格トルク110%(ベベルギア+遊星ギア段)での全負荷トルク試験
- ✔3,000 rpm時の騒音 — 65 dB(A)未満であることが確認済み
- ✔材料証明書と寸法報告書は各製品に同梱されます。

韓国のエンジニアが韓国エバーパワーEP-BADRシリーズを指定する理由
🔵
デュアルCMMによる角度と同心度の検証
EP-BADRは、他のユニットでは実施されない2つのCMM検査(直角の垂直度と出力軸に対するフランジの同心度)を受けます。これらの検査結果は出荷証明書に記載されており、AGVモジュールと協働ロボットのジョイントアセンブリの公差にとって不可欠です。
📊
最大直角比 — 最大200:1
EP-BADRの200:1の2段減速機能は、韓国エバーパワーの直角減速機シリーズにおいて他に類を見ないものです。この形式の競合製品で、単一の密閉型直角ユニットでi=140とi=200をP1精度でカバーできるものはありません。これにより、超低速直角駆動に必要な第3減速段が不要になります。
⚡
≥93%の効率 ― ウォームギアによる熱損失なし
放熱面積が限られているAGV駆動モジュールや協働ロボット関節の場合、EP-BADR(93%以上)とウォームギア式(40~70%)の効率差によって、熱管理ソリューションが必要かどうかが決まります。EP-BADRは通常、熱管理ソリューションを必要としません。
🇰🇷
韓国のAGVおよび協働ロボットの応用に関する専門知識
Korea Ever-Powerのアプリケーションチームは、韓国のAGVおよび協働ロボットOEM仕様(駆動モジュールのパッケージング制約、韓国の工場安全基準、KS認証文書要件など)に関する豊富な経験を有しています。設計および認証段階全体を通して、韓国語によるサポートを提供します。
📦
韓国株 — EP-BADR090 標準比率
EP-BADR090は、10:1、20:1、50:1の比率で韓国の倉庫に保管されており、同週内に出荷可能です。拡張比率(140:1、200:1)の場合は、4~6週間のリードタイムが必要となりますので、生産立ち上げスケジュールに合わせて事前に計画を立ててください。
🛡️
2年間保証 - 韓国のクレームサービス
バックラッシュ、ベベルの完全性、直角度、フランジの同心度など、出荷証明書に記載されたすべての項目について24ヶ月間の保証を提供します。クレーム処理は韓国で行われ、国際的な返送手続きは不要です。
顧客レビューとアプリケーションに関するフィードバック
5つ星
80%
4★
17%
≤3 ★
3%
EP-BADR090は、i=20の単段式で、800kgクラスの円筒形AGV駆動モジュールのステアリングピボットに使用されています。丸型フランジは、ブラケットやオフセットなしで、96mmのボアハウジングに直接挿入できます。従来のウォームギアと角型アダプタを組み合わせた設計と比較して、モジュールの高さを48mm削減できました。デュアルCMM認証(垂直度+同心度)により、初回品測定作業を2週間短縮できました。18ヶ月の運用期間、34個のモジュールの導入、ステアリングアクチュエータの故障はゼロです。
EP-BADR064は、協働ロボットのクロスアクシスケーブルパススルー手首ジョイント用に、i=14のシングルステージ構成で使用しました。丸型フランジにより、32mmのケーブル束をボルトサークルの中心に通すことができ、直角出力により前腕部をコンパクトに保つことができました。i=14のシングルステージ構成では、同等の2ステージ構成と比較して軸方向の長さを26mm短縮することができ、前腕リンクを再設計することなく、ISO/TS 15066アームプロファイル要件を満たすことができました。P1バックラッシュ証明書は、ジョイント精度テストプロトコルを初回実行で合格しました。
済州島の5MW発電設備における単軸ソーラートラッカーの柱駆動装置として、EP-BADR140(100:1 2段式)を採用。丸フランジは当社の168mm鋼管柱穴に直接ボルト締めされており、段差のない設計となっています。直角配置によりサーボモーターは水平に保たれ、柱内部での雨水の直接的な影響から保護されています。済州島の風力発電エリアに設置された150台のトラッカーユニットは2年間稼働していますが、アクチュエータの故障は発生していません。密閉潤滑方式により、仕様どおり全期間にわたりメンテナンスフリーを実現しています。
EP-BADR255は、低速の医薬品搬送コンベア向けに200:1の2段構成で採用されました。駆動軸に対して直角に配置された2,400rpmのサーボモーターから12rpmの出力が必要で、コンベアフレームのエンドプレート(丸穴)に取り付けられました。BADR255ユニット1台で、フレーム幅を180mm広くする必要があったチェーン駆動と角フランジギアボックスの組み合わせを置き換えました。効率向上により、モーター出力は5.5kWから3.7kWに削減されました。200:1構成の納期は5週間でしたが、事前に明確に伝え、プロジェクト計画はそれに応じて調整されました。
よくある質問

追加情報
| エディタ | Cxm |
|---|
関連製品
-

EP-AERシリーズ直角大フランジ遊星歯車減速機
-

EP-ABシリーズ 標準角フランジ高精度インライン遊星歯車減速機(EP-AB042~EP-AB220)
-

BAEシリーズ高精度遊星歯車減速機 - 大型フランジタイプ(EP-BAE050~EP-BAE235)
-

High-Precision Compact Planetary Gearbox for Servo Integration — PLS Series (PLS70–PLS190)
-

高出力連続駆動用ヘリカル遊星歯車減速機 — PZBシリーズ(60~220PZB)
-

チェーンドライブ遊星ギアボックス – EPWシリーズ
-

チェーンドライブシステム用 EPL ダブルシャフト プラネタリーギアボックス
-

産業用チェーンドライブ向けPLS精密遊星ギアボックス


























