BADR 시리즈 직각 고정밀 유성 기어박스 - 원형 플랜지 (EP-BADR047 ~ EP-BADR255)
")
EP-BADR 시리즈는 90도 베벨 입력단과 원형 플랜지 출력단을 갖춘 고정밀 직각 유성 기어박스로, EP-BADR047부터 EP-BADR255까지 7가지 프레임 크기로 제공됩니다. 정격 출력 토크는 19 N·m에서 최대 2,000 N·m까지이며, 정밀 등급의 백래시는 ≤3 arcmin, 전체 효율은 ≥93%(단일단 기준)입니다. 사각 플랜지 EP-BAD를 넘어 BADR 시리즈는 단일단 기어비를 14:1 및 20:1까지, 이중단 기어비를 200:1까지 확장했으며, 원형 플랜지 출력단은 원통형 하우징 및 회전 조인트에 장착을 간소화하여 한국 에버파워 EP 시리즈 중 가장 넓은 기어비 범위를 제공하는 직각 정밀 기어 감속기입니다.
EP-BADR 시리즈 — 직각 원형 플랜지 고정밀 유성 기어박스
그만큼 EP-BADR 시리즈 고정밀 유성 기어박스 하나의 장치에 세 가지 기능을 결합합니다: 90° 직각 출력 정밀 경사 입력 단계를 통해, 원형 플랜지 출력 원통형 보어 장착용, 그리고 가장 넓은 기어비 범위 한국 에버파워 직각 제품군에는 단일 단계(최대 20:1)와 이중 단계(최대 200:1) 제품이 있습니다. 직각 토크 방향 전환, 원형 볼트 장착, 높은 감속비라는 세 가지 특성이 동시에 요구되는 기계 설계에 가장 적합한 선택입니다.
EP-BADR047부터 EP-BADR255까지 7가지 프레임 크기 모두에서, 완전한 P1 백래시 사양을 충족합니다. ≤3 arcmin 단일 단계 및 ≤5 arcmin 이중 단계 출력축에서 유지됩니다(베벨 단계 기여도 포함). 결합 장치 효율은 다음과 같습니다. ≥93% 단일 단계 및 ≥90% 이중 단계동일 기어비에서 웜 기어 대안을 훨씬 능가하는 성능을 제공합니다. 전체 경화 합금강 기어, ANSYS 검증을 거친 치면 보정, 일체형 유성 캐리어 및 출력 샤프트가 통합되어 한국의 AGV, 협동 로봇 및 자동화 장비 제조업체가 요구하는 장기적인 백래시 안정성을 제공합니다.
EP-BADR이 적용되는 분야 — 직각 원형 플랜지 매트릭스
한국 에버파워의 직각 유성 기어박스와 원형 플랜지 변형 제품은 2×2 선택 매트릭스를 구성합니다. EP-BADR은 특정 조건을 요구하는 셀을 차지합니다. 둘 다 직각 출력 및 원형 플랜지 장착 - 가장 특수한 구성이며, 가장 넓은 비율 범위를 제공합니다.
| 사각 플랜지 출력 | 원형 플랜지 출력 | |
|---|---|---|
| 인라인(0°) 출력 | EP-BAB i=3~100 |
EP-BABR i=3~200 |
| 직각(90°) 출력 | EP-BAD i=4~100 |
★ EP-BADR i=4~200 |
EP-BADR과 EP-BAD의 주요 차이점
| 표준 | EP-BADR ★ | EP-BAD |
|---|---|---|
| 출력 방향 | 90도 직각 | 90도 직각 |
| 출력 플랜지 | 원형 볼트 서클 | 사각 플랜지 |
| 단일 단계 비율 | 4, 5, 6, 7, 8, 10, 14, 20 | 4, 5, 6, 7, 8, 10 |
| 2단계 최대 비율 | 200:1 | 100:1 |
| 백래시 P1 / 효율 | ≤3'/≤5' · ≥93%/≥90% | ≤3'/≤5' · ≥93%/≥90% |
| ~에 가장 적합함 | 원통형 보어, 회전 조인트, 고비율 직각 구동 장치 | 평평한 기계 베드, 표준 볼트 패턴 |
귀하의 애플리케이션에는 직각 출력과 다음 조건 중 하나 이상이 필요합니다. (a) 원통형 하우징에 원형 볼트 서클 장착; (b) 단일 단계 기어비 14:1 또는 20:1; (c) 2단계 기어비 100:1 초과. 기어비가 100:1 이하인 경우 표준 사각 플랜지로 충분하다면 EP-BAD가 더 간단한 선택입니다.
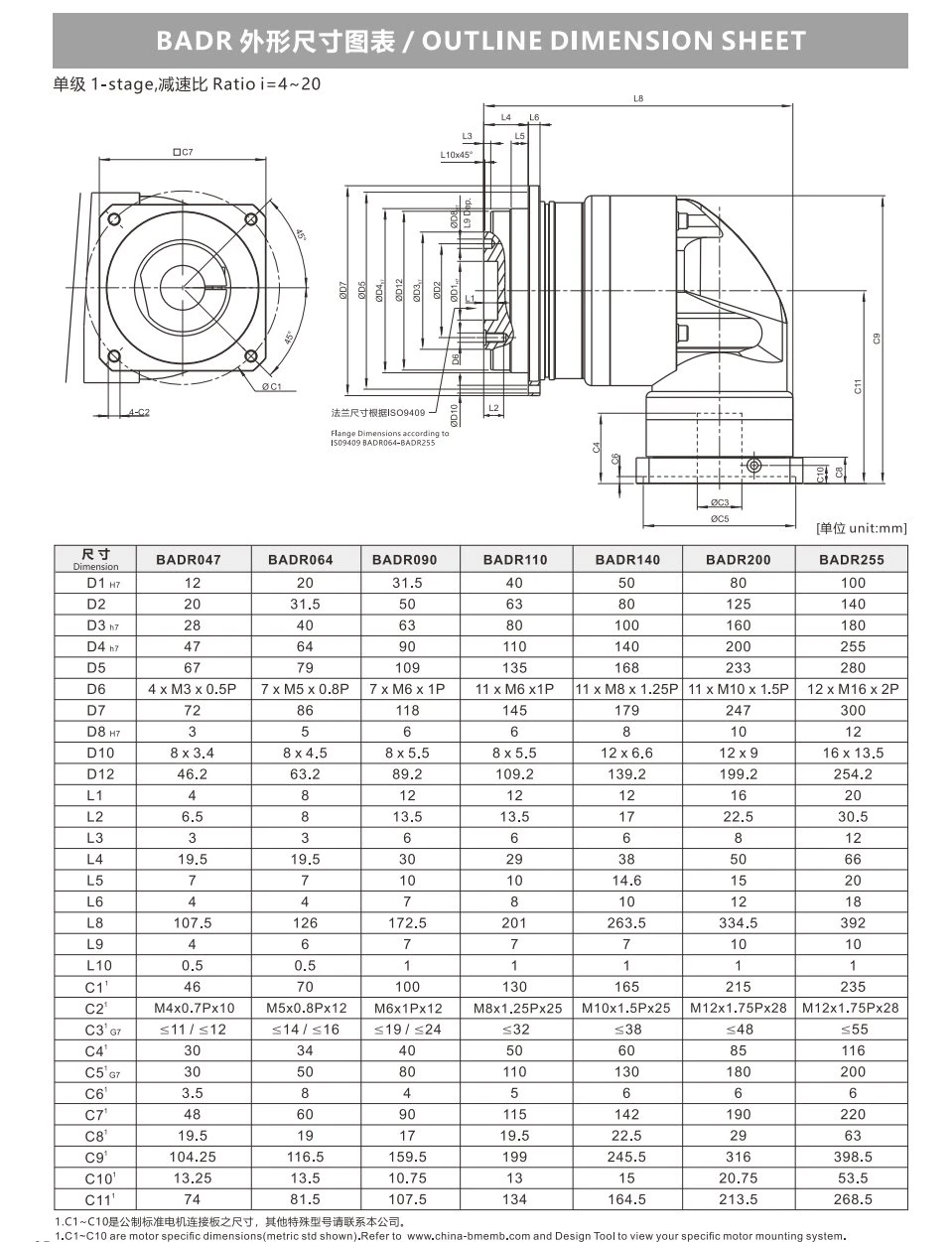
EP-BADR047부터 EP-BADR255까지 - 직각 유성 기어박스 전체 사양
| 공통 사양 — 모든 EP-BADR 프레임 | |
|---|---|
| 출력 방향 | 90° 직각 (경사 입력 + 유성 기어 감속) |
| 출력 플랜지 | 원형 볼트 서클(출력축과 동심원) |
| 백래시 P1 | 단일 단계 ≤3 arcmin · 이중 단계 ≤5 arcmin (총합, 경사각 포함) |
| 백래시 P2 | 단일 단계 ≤8 arcmin · 이중 단계 ≤12 arcmin |
| 단일 단계 비율 | 4, 5, 6, 7, 8, 10, 14, 20 |
| 2단계 비율 | 20, 25, 30, 35, 40, 50, 60, 70, 80, 100, 140, 200 |
| 전반적인 효율성 | 단일 단계 ≥93% · 이중 단계 ≥90% |
| 소음 (3,000rpm, 무부하, 1m) | <65dB(A) |
| 최대 토크(비상 정지) | 정격 출력 토크의 3배 (순간) |
| 최대 가속 토크 | 정격 토크 60% (T₂s = 0.6 × T₂Nor) |
| 작동 온도 | 0°C ~ +40°C |
정격 출력 토크(N·m) — 단일 단계(i = 4~20)
| 비율 | BADR047 | BADR064 | BADR090 | BADR110 | BADR140 | BADR200 | BADR255 |
|---|---|---|---|---|---|---|---|
| i=4 | 19 | 48 | 130 | 270 | 560 | 1,100 | 1,700 |
| i=5 | 22 | 60 | 160 | 330 | 650 | 1,200 | 2,000 |
| i=6 | 20 | 65 | 150 | 310 | 600 | 1,100 | 1,900 |
| i=7 | 19 | 50 | 140 | 300 | 550 | 1,100 | 1,800 |
| i=8 | 17 | 45 | 120 | 260 | 500 | 1,000 | 1,600 |
| i=10 | 14 | 60 | 160 | 325 | 650 | 1,200 | 2,000 |
| i=14 ★ | — | 42 | 140 | 300 | 550 | 1,100 | 1,800 |
| i=20 ★ | — | 40 | 100 | 230 | 450 | 900 | 1,500 |
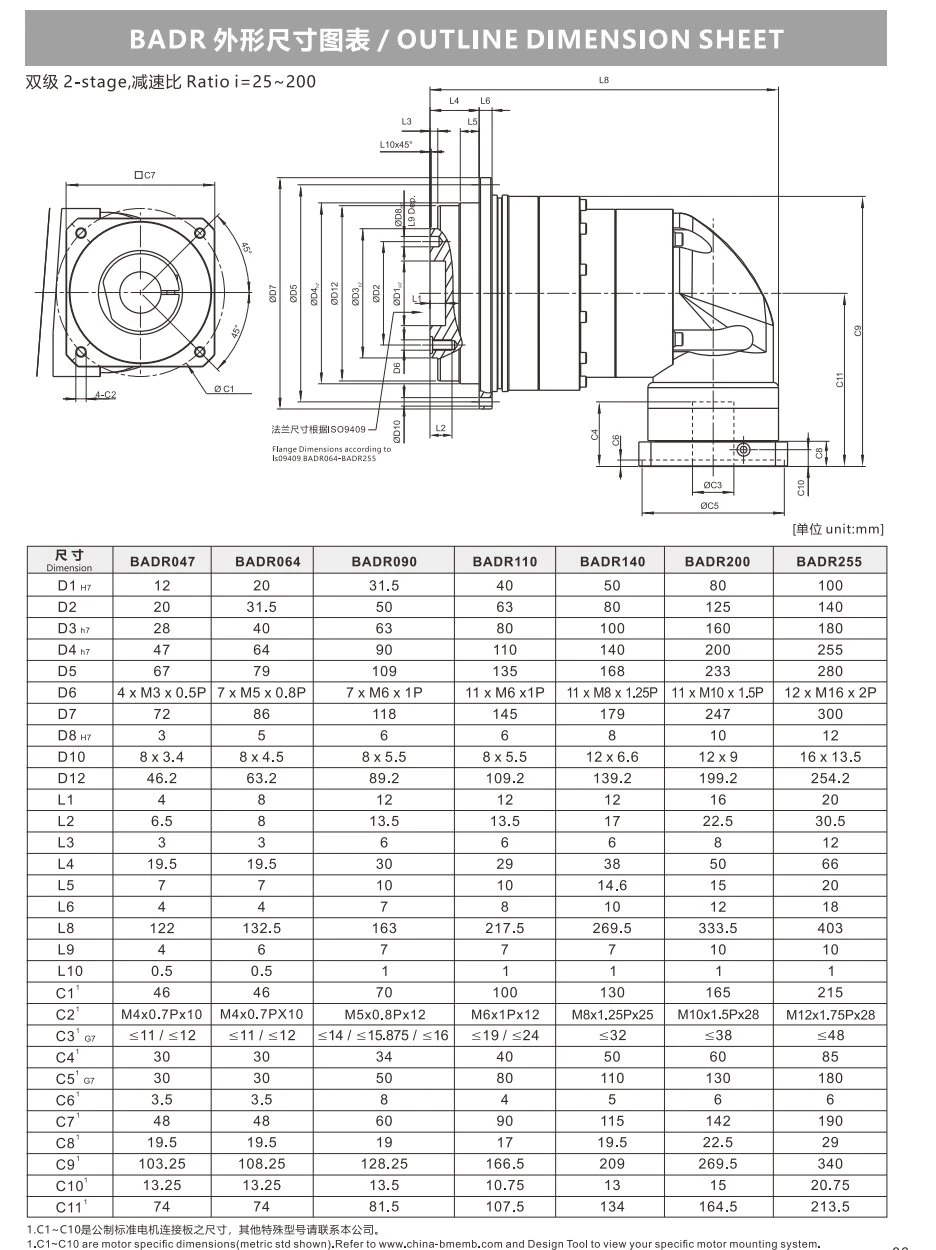
정격 출력 토크(N·m) — 2단(i = 25 ~ 200)
| 비율 | BADR047 | BADR064 | BADR090 | BADR110 | BADR140 | BADR200 | BADR255 |
|---|---|---|---|---|---|---|---|
| i=25 | 22 | 60 | 160 | 330 | 650 | 1,200 | 2,000 |
| i=30 | 20 | 55 | 150 | 310 | 600 | 1,100 | 1,900 |
| i=40 | 19 | 48 | 130 | 270 | 560 | 1,100 | 1,700 |
| i=50 | 22 | 60 | 160 | 330 | 650 | 1,200 | 2,000 |
| i=70 | 19 | 50 | 140 | 300 | 550 | 1,100 | 1,600 |
| i=100 | 17 | 45 | 120 | 260 | 500 | 1,000 | 1,600 |
| i=140 ★ | — | — | — | — | — | — | 사용 가능 |
| i=200 ★ | — | — | — | — | — | — | 사용 가능 |
★ = EP-BADR 전용 기능 - EP-BAD에서는 제공되지 않습니다. i=140 및 i=200에서의 전체 토크 데이터는 한국 에버파워에 문의하십시오.
프레임별 최대 정격 입력 속도(RPM)
| 액자 | 047 | 064 | 090 | 110 | 140 | 200 | 255 |
|---|---|---|---|---|---|---|---|
| 최대 RPM | 5,000 | 5,000 | 5,000 | 4,000 | 4,000 | 3,000 | 2,000 |
모델명 안내 — EP-BADR 부품 번호
원형 플랜지
90mm
단일 단계(BADR 전용)
≤3 arcmin (총합)
(모터 매칭됨)
| 위치 | 암호 | 의미 |
|---|---|---|
| 시리즈 | EP-BADR | 한국산 에버파워, 90° 직각 출력, 원형 플랜지 |
| 프레임 크기 | 047/064/090/110/140/200/255 | 하우징 직경(mm) |
| 기어비 | 4~10, 14, 20 / 20~200 | 단일 단계: 4, 5, 6, 7, 8, 10, 14, 20 · 이중 단계: 20, 25, 30, 35, 40, 50, 60, 70, 80, 100, 140, 200 |
| 반동 등급 | 피1 / 피2 | P1: ≤3'/≤5' (단일/이중 단계, 경사면 포함 전체 길이) · P2: ≤8'/≤12' |
| 입력 플랜지 | 티1 / 티2 | 입력 어댑터 플레이트 유형 — 정확한 장착을 위해 서보 모터 모델을 지정하십시오. |
적용 분야 — 직각 출력과 원형 플랜지 장착이 만나는 곳
고감속 원통형 하우징 AGV 조향 시스템
AGV 전방향 구동 모듈은 구동 휠 위에서 회전하는 원통형 피벗 하우징 내부에 조향 액추에이터를 내장합니다. 원형 플랜지 직각 기어 감속기는 이 하우징에 직접 장착되며, 원형 볼트 서클이 하우징의 어깨 부분에 고정됩니다. 90° 베벨 기어는 서보 모터가 모듈 높이 제한 위로 수직으로 돌출되지 않고 바닥과 평행하게 수평을 유지하도록 합니다. 매우 느린 조향 회전 속도가 높은 감속비를 필요로 하는 경우, BADR의 200:1 2단 감속기는 모듈 높이를 60~80mm 증가시키는 추가 웜 기어 단계를 제거합니다. CV 드라이브 샤프트 차동 구동 AGV 휠 오프셋 구성용.

크로스 축 케이블 통과 기능을 갖춘 협동 로봇 관절
일부 협동 로봇 관절 구성에서는 전원 및 신호 케이블이 링크 방향에 수직인 관절 축을 통해 연결되므로 중공축 직각 구동 장치가 필요합니다. EP-BADR의 원형 플랜지는 케이블이 볼트 원의 중심을 통과하는 중공 원형 하우징에 장착되며, 베벨 스테이지는 모터 토크를 중공 출력축으로 90° 각도로 전달합니다. i=14 및 i=20 단일 스테이지 옵션은 로봇의 정격 페이로드 범위 내에서 엔드 이펙터 도달 거리에 영향을 미치는 협동 로봇 손목 관절에 필수적인 컴팩트한 축 길이를 제공합니다.
태양광 추적기 기둥 구동 장치 (원형 기둥 장착형)
원형 강관 기둥에 설치되는 단축형 태양광 추적기는 기둥 내부 구멍에 틸트 액추에이터를 장착합니다. EP-BADR의 원형 플랜지는 전환 브래킷 없이 기둥 내부 구멍 플랜지에 직접 볼트로 고정되며, 90° 출력은 수직으로 장착된 모터에서 추적기 토크 튜브를 수평으로 구동합니다. 50:1~100:1의 기어비로 EP-BADR은 한국의 대규모 태양광 발전 설비의 풍하중 기준에 필요한 틸트 토크를 제공하며, 밀폐형 윤활 장치는 추적기의 설계 수명 25년 동안 현장 유지 보수가 전혀 필요하지 않습니다. 2차 전력 분배는 다음을 통해 이루어집니다. 경사면 단계 하나의 구동 장치로 추적기 배열의 양쪽 절반을 모두 작동시킬 수 있습니다.
지원 참조
- ✦원통형 AGV 구동 모듈
- ✦협동 로봇 크로스 액시스 케이블 조인트
- ✦태양광 추적 컬럼 드라이브
- ✦원형 기둥 갠트리 축
- ✦중공축 회전 액추에이터
- ✦스태커 크레인 원형 마스트 구동 장치
- ✦의료영상 실습
- ✦저속 컨베이어 직각 구동 장치
- ✦건축 외관 액추에이터
원형 기둥형 스태커 크레인 마스트
원형 단면 마스트 스태커 크레인은 수평 이동 구동 장치를 마스트 튜브 내부에 배치합니다. 이 고정밀 유성 기어박스는 원형 마스트 튜브 내경에 직접 장착되며, 90° 출력은 마스트 축 방향으로 장착된 모터에서 이동 랙을 구동합니다. 이는 외부 브래킷 없이는 마스트 단면적을 증가시키고 랙킹 레인 밀도를 감소시키는 사각형 플랜지 직각 유닛으로는 불가능한 구조입니다.
고비율 저속 컨베이어 직각 구동 장치
서보 모터에서 3~15rpm의 출력을 요구하는 컨베이어 벨트 구동 장치는 구동축을 모터에 수직으로 회전시키기 위한 직각 출력과 높은 감속비가 모두 필요한 경우가 많습니다. EP-BADR은 140:1~200:1의 2단 감속비를 제공하며, 밀폐형 직각 유성 기어 감속기 하나로 이 두 가지 요구 사항을 모두 충족합니다. 따라서 기존의 최대 100:1 감속비 직각 기어 감속기가 이러한 출력 속도를 달성하기 위해 필요로 하는 체인 또는 벨트 중간 단계를 제거할 수 있습니다.
의료 영상 촬영용 갠트리 회전
CT 스캐너 및 방사선 치료기 갠트리 회전 구동 장치에는 원형 갠트리 링 보어에 통합되는 소형, 무진동, 밀폐형 기어 감속기가 필요합니다. EP-BADR의 원형 플랜지 형상과 90° 출력은 이러한 구조에 완벽하게 부합합니다. 출력 샤프트와 동심원을 이루는 원형 볼트 패턴은 사각형 플랜지 직각 장치에서 발생하는 편심 오프셋 없이 갠트리 링 베어링 인터페이스에 완벽하게 통합됩니다.

프레임 크기 선택 — EP-BADR047 ~ EP-BADR255
047
EP-BADR047 — 소형 직각 원형 피스톤 (최대 22 N·m · 5,000 rpm)
가장 작은 직각 원형 플랜지 프레임. 최대 22 N·m(i=5). 소형 AGV 조향 서브 모듈, 초소형 협동 로봇 손목 횡축 관절, 계측기 수준의 정밀 위치 제어. 50~200W 서보 모터와 호환 가능.
064
EP-BADR064 — 경량 직각 원형 볼트 (최대 65 N·m · 5,000 rpm)
최대 65 N·m(i=6). 경량 AGV 조향 모듈, 소형 협동 로봇 팔꿈치 교차축 조인트, i=14 및 i=20 단일 단계 사용 가능. 100~750W 서보 모터와 호환 가능.
090
EP-BADR090 — 표준 직각 원형 ★ 최고 사양 (최대 160 N·m)
최대 160 N·m (i=5/10). BADR 제품군에서 가장 많이 주문되는 직각 유성 기어박스 프레임으로, 5~10kg 페이로드 협동 로봇의 교차축 관절, 500kg급 AGV 조향 모듈, 태양광 추적 장치 컬럼 구동 장치 등에 사용됩니다. i=20 단일 단계 및 최대 200:1 2단계 기어비가 제공됩니다. 최대 5,000rpm에서 200~1,500W 서보 모터와 호환됩니다.
110
EP-BADR110 — 중형 직각 원형 (최대 330 N·m · 4,000 rpm)
최대 330 N·m. 최대 입력 회전수 4,000rpm. 1,000kg급 AGV 조향, 원형 기둥형 갠트리 횡방향 구동 장치, 중형 자동화용 중공축 회전 액추에이터. 750~2,200W 서보 모터와 호환 가능.
140
EP-BADR140 — 고하중 직각 원형 볼트 (최대 650 N·m · 4,000 rpm)
최대 650 N·m의 토크를 제공하며, 2,000kg급 AGV 조향, 대형 중공축 액추에이터, 대규모 태양광 추적 장치 구동에 적합합니다. 1,500~3,500W 서보 모터와 호환됩니다.
200
EP-BADR200 — 고출력 직각 원형 피스톤 (최대 1,200 N·m · 3,000 rpm)
최대 1,200 N·m. 최대 입력 회전수 3,000rpm. 고하중 원형 마스트 AS/RS 스태커 크레인 구동 장치, 대형 중공축 액추에이터. 하류 웜 기어 통합 셀프록킹 웜 단계 수직 하중 지지용. 2,200~5,500W 서보 모터와 호환됩니다.
255
EP-BADR255 — 최대 프레임(최대 2,000 N·m · 200:1 · 2,000 rpm)
최대 직각 원형 플랜지 프레임. 최대 2,000 N·m(i=5/10/50), 200:1 2단 구성 가능 - 단일 직각 유닛에서 3,000 rpm 입력으로 15 rpm 출력 구현 가능. 최대 입력 회전수 2,000rpm. 대형 AGV 옴니휠 피벗 드라이브, 산업용 회전로 직각 프리드라이브, 중형 중공축 액추에이터에 사용 가능합니다. 3,500~7,500W 서보 모터와 호환됩니다.

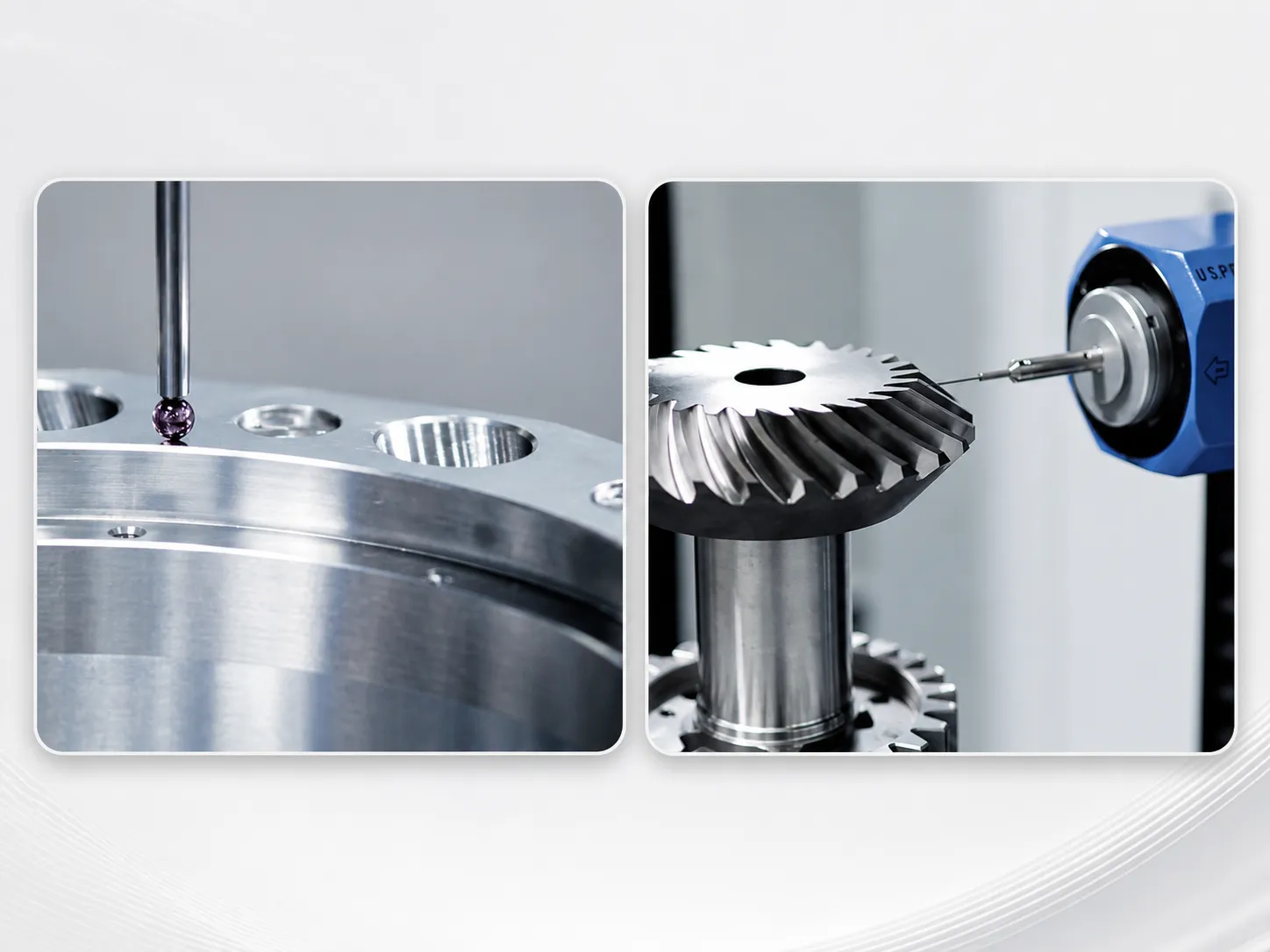
품질 인증, 공장 및 시험 표준
- ✔단위당 측정된 총 백래시 — P1/P2 검증됨 (베벨 기어 + 유성 기어)
- ✔직각도 및 원형 플랜지 동심도 - 모두 CMM으로 검증됨
- ✔정격 토크 110%(베벨 기어 + 유성 기어)에서의 최대 부하 토크 테스트
- ✔3,000rpm에서의 소음 — <65dB(A) 확인됨
- ✔모든 제품에 재질 인증서 및 치수 보고서가 함께 제공됩니다.

한국 엔지니어들이 에버파워 EP-BADR 시리즈를 선택하는 이유는 무엇일까요?
🔵
이중 CMM 검증 - 각도 및 동심도
EP-BADR은 다른 장비에서는 수행하지 않는 두 가지 CMM 검사를 받습니다. 바로 직각도와 출력축에 대한 원형 플랜지의 동심도 검사입니다. 이 두 가지 검사는 출하 증명서에 포함되며, AGV 모듈 및 협동 로봇 관절 조립 공차에 필수적입니다.
📊
최대 직각비 — 최대 200:1
EP-BADR의 200:1 2단 감속 기능은 한국 에버파워의 직각 기어 감속기 제품군에서 독보적입니다. 경쟁사 제품 중 이와 같은 형식의 기어 감속기 중 i=140과 i=200을 단일 밀폐형 직각 유닛에서 P1 정밀도로 구현하는 제품은 없습니다. 이는 초저속 직각 구동 장치에서 세 번째 감속 단계를 제거하는 효과를 가져옵니다.
⚡
≥93% 효율 — 웜 기어 열 손실 없음
열 방출 표면적이 제한적인 AGV 구동 모듈 및 협동 로봇 관절의 경우, EP-BADR(≥93%)과 웜 기어 방식(40–70%) 간의 효율 차이에 따라 열 관리 솔루션이 필요한지 여부가 결정됩니다. EP-BADR은 일반적으로 열 관리 솔루션이 필요하지 않습니다.
🇰🇷
한국의 AGV 및 협동 로봇 응용 분야 전문성
한국 에버파워의 애플리케이션 팀은 한국 AGV 및 협동 로봇 OEM 사양, 즉 구동 모듈 패키징 제약, 한국 공장 안전 기준 및 KS 인증 문서 요구 사항에 대한 직접적인 경험을 보유하고 있습니다. 설계 및 검증 단계 전반에 걸쳐 한국어 지원을 제공합니다.
📦
한국 주식 — EP-BADR090 표준 비율
EP-BADR090은 10:1, 20:1, 50:1 비율로 한국 창고에 보관되어 있어 당일 발송이 가능합니다. 고비율(140:1, 200:1) 제품은 4~6주의 준비 기간이 소요되므로 생산량 증대 계획 수립 시 미리 고려하시기 바랍니다.
🛡️
2년 보증 - 한국 클레임 서비스
백래시, 베벨 정밀도, 직각도 및 플랜지 동심도 등 모든 항목에 대해 24개월 보증이 제공되며, 모든 사항은 출하 증명서에 기재되어 검증됩니다. 보증 청구는 한국에서 처리되므로 해외 반송 물류가 필요하지 않습니다.
고객 리뷰 및 애플리케이션 피드백
5 ★
80%
4 ★
17%
≤3 ★
3%
EP-BADR090은 800kg급 원통형 AGV 구동 모듈의 조향 피벗에 사용되는 i=20 단일 단계 구동 장치입니다. 원형 플랜지는 브래킷이나 오프셋 없이 96mm 내경 하우징에 바로 삽입되었습니다. 기존의 웜 기어와 사각 어댑터를 사용한 설계 대비 모듈 높이를 48mm 줄였습니다. 이중 CMM 인증(직각도 + 동심도) 덕분에 초도품 측정 작업에 소요되는 시간을 2주 단축할 수 있었습니다. 18개월 동안 34개의 모듈을 설치하여 사용했으며, 조향 액추에이터 관련 고장은 단 한 건도 발생하지 않았습니다.
EP-BADR064는 i=14 단일 스테이지 방식으로 협동 로봇의 크로스 축 케이블 통과형 손목 관절에 적용되었습니다. 원형 플랜지 덕분에 32mm 케이블 다발이 볼트 서클 중심을 통과할 수 있었고, 직각 출력부는 팔뚝의 크기를 최소화했습니다. i=14 단일 스테이지 방식을 통해 동일한 2단 스테이지 방식 대비 축 방향 길이를 26mm 단축할 수 있었으며, 이는 팔뚝 링크를 재설계하지 않고도 ISO/TS 15066 암 프로파일 요구 사항을 충족하기에 충분했습니다. P1 백래시 인증서는 첫 번째 실행에서 관절 정확도 테스트 프로토콜을 통과했습니다.
제주도 5MW 발전소의 단축 태양광 추적기 기둥 구동 장치에 EP-BADR140 100:1 2단 구동축을 적용했습니다. 원형 플랜지는 168mm 강관 기둥 내부에 직접 볼트로 고정되어 별도의 연결부가 필요 없습니다. 직각 구조로 서보 모터를 수평으로 유지하여 기둥 내부에서 빗물에 직접 노출되지 않도록 보호했습니다. 제주도 풍속 지역에 설치된 150대의 추적기에서 2년간 액추에이터 고장이 한 건도 발생하지 않았습니다. 밀폐형 윤활 시스템을 사용하여 전체 기간 동안 유지 보수가 전혀 필요 없었습니다.
EP-BADR255는 200:1 2단 기어비로 제약 설비의 저속 컨베이어에 적합했습니다. 구동축과 직각으로 설치된 원형 컨베이어 프레임 끝판에 장착된 2,400rpm 서보 모터에서 12rpm의 출력이 필요했습니다. 기존의 체인 구동 방식과 사각 플랜지 기어박스 조합은 BADR255 단일 유닛으로 대체되었으며, 기존 방식은 프레임 폭이 180mm 더 넓었습니다. 효율 개선으로 모터 용량을 5.5kW에서 3.7kW로 줄였습니다. 200:1 기어비의 납기는 5주였으며, 사전에 명확하게 안내하여 프로젝트 계획을 조정했습니다.
자주 묻는 질문

추가 정보
| 편집자 | Cxm |
|---|
관련 상품
-

EP-AER 시리즈 직각 대형 플랜지 유성 기어박스
-

EP-ADR 시리즈 직각 원형 플랜지 정밀 유성 기어박스 (EP-ADR047 ~ EP-ADR255)
-

EP-ABR 시리즈 직각 사각 플랜지 정밀 유성 기어박스 (EP-ABR042 ~ EP-ABR220)
-

BAE 시리즈 고정밀 유성 기어박스 - 대형 플랜지형 (EP-BAE050 ~ EP-BAE235)
-

일반 산업용 표준 경제형 유성 기어박스 — PL 시리즈 (PL40–PL160)
-

고출력 연속 구동용 헬리컬 유성 기어박스 — PZB 시리즈 (60–220PZB)
-

체인 구동식 유성 기어박스 – EPW 시리즈
-

체인 구동 시스템용 EPL 이중 축 유성 기어박스


























