EP-ZDWE Series Right-Angle Input Precision Planetary Gearbox

The EP-ZDWE Series is a right-angle input precision planetary gearbox with a 90° bevel input stage and round circular-flange output, available in four frame sizes from EP-ZDWE-60 to EP-ZDWE-160. It delivers rated output torque from 12 N·m up to 800 N·m with backlash of <25–30 arcmin and single-stage efficiency of 94%. The 90° bevel input positions the servo motor perpendicular to the output shaft axis, reducing the total axial installation length by 30–50% compared to the inline EP-ZDE — making EP-ZDWE the preferred right-angle precision planetary gear reducer for Korean compact machine tool headstocks, robot joints, and space-constrained servo actuator designs. Ratio range 3:1 to 512:1 with lifetime lubrication and IP54 protection.
EP-ZDWE Series — Right-Angle Input Precision Planetary Gearbox | Round Flange, 30–50% Axial Space Saving, up to 800 N·m
EP-ZDWE positions the servo motor at 90° to the output shaft via an internal bevel gear stage, reducing the total axial length of the motor + gearbox assembly by 30–50% compared to the inline EP-ZDE planetary gearbox. The output is a round (circular) mounting flange — identical to EP-ZDE for output-side installation. For the square-flange right-angle version, see the EP-ZDWF series.
The EP-ZDWE series right-angle input precision planetary gearbox from Korea Ever-Power solves the most common spatial constraint in Korean servo drive design: the motor axis cannot be coaxial with the output shaft axis. In compact machine tool headstocks, robot wrist joints, narrow-profile conveyor drives, and multi-axis gantry systems where available depth behind the output shaft is limited, EP-ZDWE places the motor perpendicular to the output — either left/right or up/down — reclaiming the axial space that an inline motor would otherwise consume.
The bevel input stage introduces one additional gear mesh compared to the inline EP-ZDE, reducing single-stage efficiency from 96% (EP-ZDE) to 94% — a minor trade-off that Korean machine designers readily accept in exchange for the installation footprint reduction. The output shaft, round flange, bearing arrangement, lifetime lubrication, and IP54 sealing are identical to EP-ZDE of the same frame size, ensuring the output-side installation is a direct carryover.
The 90° Bevel Input — How It Saves Axial Space and When to Use It

INLINE INPUT (EP-ZDE) — TOTAL AXIAL LENGTH
[====Motor====][===ZDE===]──▶ Output
Total depth = Motor + L1
e.g. 80-frame 1-stage:
Motor ~120 mm + L1 144 mm
= ~264 mm axial depth
RIGHT-ANGLE INPUT (EP-ZDWE) — AXIAL SAVING
↓ 90° bevel
[=====ZDWE=====]──▶ Output
Total depth = Gearbox L1 only
e.g. 80-frame 1-stage:
L1 184.5 mm axial depth only
Motor exits sideways → saved!
Three Engineering Situations Where EP-ZDWE Is the Correct Choice
① Machine Envelope Has Depth Limit Behind the Output — Motor Cannot Fit Inline
Korean compact machining centre headstocks, dial-index machine tool rotary axis units, and narrow-profile conveyor drives frequently have a hard structural limit on the depth available behind the gearbox output flange. On an 80-frame inline EP-ZDE with a 1 kW servo motor, the motor + gearbox assembly can reach 260–290 mm total depth — exceeding the available space in the machine column or arm section. EP-ZDWE-80 with the same motor reduces the axial depth to the gearbox length alone (184.5 mm, 1-stage), with the motor extending sideways within the available width of the machine section. This 30–40% axial reduction is frequently the deciding factor for Korean machine tool designers between a compact single-column design and a wider (and heavier) dual-column structure.
② Robot Arm Cross-Section Limits Inline Motor Placement
Korean collaborative robot and industrial robot wrist joint designers face a fundamental conflict: the joint must transmit significant torque (typically 20–80 N·m at the wrist) while fitting within the robot arm outer diameter — typically 60–100 mm for a 6 kg payload robot. An inline motor + planetary gearbox combination at this torque level extends the robot link length significantly, affecting the robot's workspace envelope and dynamic balance. EP-ZDWE positions the motor perpendicular to the joint axis, allowing the robot wrist outer diameter to be governed by the gearbox body diameter (Φ60–Φ80 mm) rather than the combined motor + gearbox depth. Korean collaborative robot manufacturers in Suwon and Seongnam report EP-ZDWE-60 and EP-ZDWE-80 enabling wrist joint designs that reduce the link length by 80–120 mm compared to inline motor configurations.
③ Multi-Axis Gantry Systems — Parallel Motor Arrangement for Centre-of-Gravity Optimisation
Korean high-speed laser cutting and pick-and-place gantry systems driving X, Y, and Z axes from a single compact carriage assembly benefit from EP-ZDWE by allowing all three servo motors to be arranged parallel to the carriage travel direction — motors pointing sideways rather than forward and rearward. This concentrates the motor mass close to the carriage centre of gravity, reducing the dynamic moment arm of the motor inertia contribution and improving positioning accuracy at high acceleration rates. For Korean laser cutting systems at 150+ m/min feed rates, the centre-of-gravity improvement from right-angle motor placement measurably reduces trajectory error at direction reversals compared to inline configurations where the motor mass extends the carriage overhang.
EP-ZDWE vs EP-ZDE — Choosing Between Right-Angle and Inline Input
| Criterion | EP-ZDE — Inline Input | EP-ZDWE — Right-Angle Input ★ |
|---|---|---|
| Motor-to-output orientation | Coaxial — motor in line with output shaft | 90° — motor perpendicular to output shaft |
| Total axial installation depth | Motor length + Gearbox L1 (e.g. ~264 mm for 80-frame) | Gearbox L1 only (e.g. 184.5 mm for 80-frame) — 30–50% shorter |
| Single-stage efficiency | 96% — no bevel stage loss | 94% — bevel stage adds ~2% loss |
| Available frame sizes | 40 / 60 / 80 / 120 / 160 mm (5 sizes) | 60 / 80 / 120 / 160 mm (4 sizes — no 40 mm frame) |
| Output flange & shaft | Identical — round flange D7, shaft D4 h7, same torque ratings per frame | |
| Lubrication / IP / Temperature | Identical — Lifetime sealed grease · IP54 · −25°C to +90°C · Any orientation | |
| Choose when… | Axial space is adequate; efficiency priority; smallest frame (40 mm) needed | Axial depth is constrained; motor direction flexibility needed; compact arm/headstock design |
EP-ZDWE Series — Complete Technical Specifications
① Rated Output Torque (N·m) — All Frame Sizes & Ratios
| Ratio | Stage | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| 3:1 | 1 | 12 | 40 | 80 | 400 |
| 4:1 | 1 | 16 | 50 | 110 | 450 |
| 5:1 | 1 | 16 | 50 | 110 | 450 |
| 8:1 | 1 | 15 | 45 | 100 | 400 |
| 10:1 | 1 | 12 | 40 | 80 | 305 |
| 9:1 | 2 | 40 | 100 | 210 | — |
| 12:1 | 2 | 40 | 100 | 210 | 700 |
| 16:1 | 2 | 44 | 120 | 260 | 800 |
| 20:1 | 2 | 44 | 120 | 260 | 800 |
| 25:1 | 2 | 40 | 110 | 230 | 700 |
| 32:1 | 2 | 44 | 120 | 260 | 800 |
| 40:1 | 2 | 40 | 110 | 230 | 700 |
| 64:1 | 2 | 40 | 100 | 210 | 700 |
| 60–512:1 | 3 | 40–44 | 100–120 | 210–260 | — |
② Load Capacity, Efficiency, Weight & Speed
| Parameter | Unit | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| Max radial force | N | 450 | 900 | 2,100 | 6,000 |
| Max axial force | N | 225 | 450 | 1,050 | 3,000 |
| Efficiency — 1-stage | % | 94 (vs 96% for inline EP-ZDE — bevel stage) | |||
| Efficiency — 2-stage | % | 92 | |||
| Efficiency — 3-stage | % | 88 | |||
| Weight — 1-stage | kg | 1.7 | 4.4 | 12 | 36 |
| Weight — 2-stage | kg | 1.9 | 5 | 14 | 40 |
| Weight — 3-stage | kg | 2.1 | 5.5 | 16 | — |
| Torsional stiffness — 1-stage | N·m/arcmin | 1.5 | 4.5 | 10 | 38 |
| Torsional stiffness — 2-stage | N·m/arcmin | 2.5 | 6.5 | 13 | 43 |
| Noise (idle, 3,000 rpm) | dB(A) | 65 | 68 | 70 | 70 |
| Max input speed | rpm | 4,500 | |||
| Recommended input speed | rpm | 3,000 | |||
③ Backlash by Frame & Stage
| Stage | Unit | ZDWE-60 | ZDWE-80 | ZDWE-120 | ZDWE-160 |
|---|---|---|---|---|---|
| Backlash — 1-stage | arcmin | <30 | <25 | <25 | <25 |
| Backlash — 2-stage | arcmin | <35 | <30 | <30 | <30 |
| Backlash — 3-stage | arcmin | <40 | <35 | <35 | — |
④ General Specifications
| Parameter | Specification |
|---|---|
| Operating temperature | −25°C to +90°C |
| Protection rating | IP54 (IEC 60529) — dust-tight, splash-protected from any direction |
| Lubrication | Lifetime lubrication — factory-sealed, no re-greasing required |
| Mounting orientation | Any — horizontal, vertical, inverted, any inclined angle |
| Motor input direction | 4 positions — left, right, up, down (90° to output axis, specify on order) |
| Input shaft clamping types | S: integral locking (default) · S1: locking ring · S2: keyway + clamping · K: keyway · A: custom |
| Output shaft tolerance | h7 — all frame sizes (same as EP-ZDE) |
| Rated service life | 20,000 hours at rated load (L10 bearing life) |
| Instant stop torque | 2× rated output torque |
EP-ZDWE Series — Mechanical Dimensions (Unit: mm)
L12 is the total height of the gearbox including the perpendicular input flange — the critical dimension when the motor exits upward or downward. L1 is the overall length along the output axis — the dimension that determines how much axial space is saved versus the inline EP-ZDE.
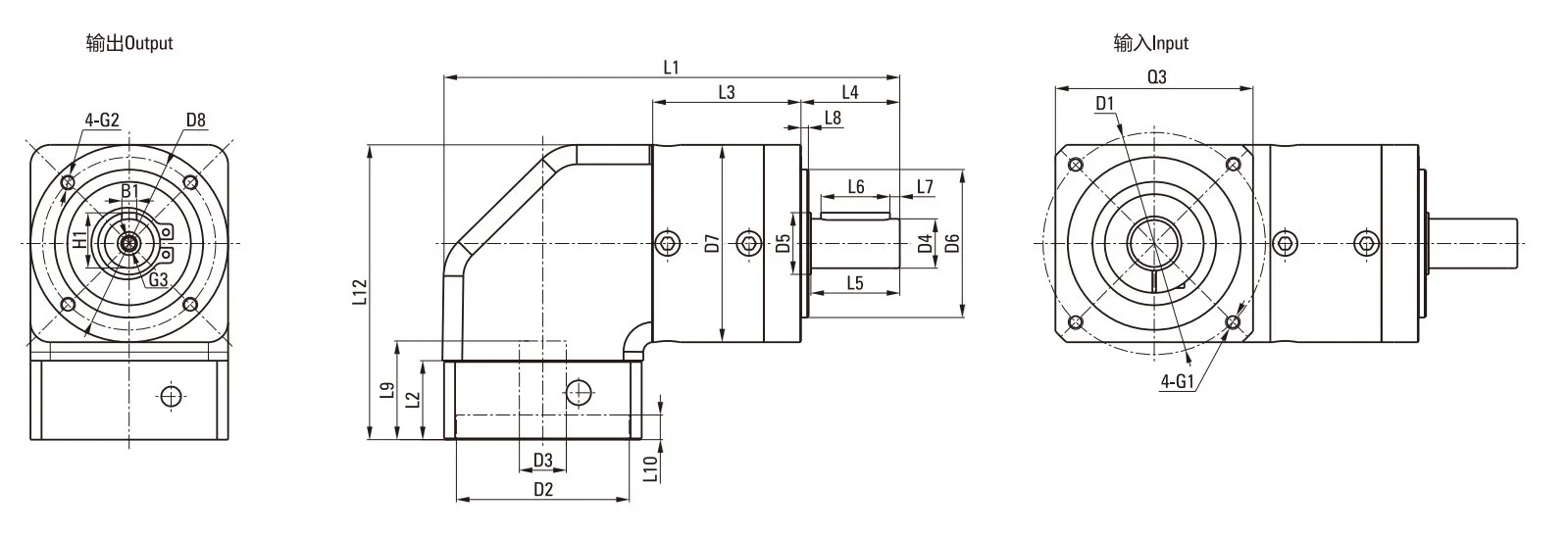
| Dimension | 60ZDWE | 80ZDWE | 120ZDWE | 160ZDWE |
|---|---|---|---|---|
| Overall length L1 — 1-stage (axial, output side) | 150 | 184.5 | 249.2 | 368 |
| Overall length L1 — 2-stage (axial, output side) | 163 | 202.5 | 277 | 417.5 |
| Total height L12 (perpendicular, incl. input flange) | 93 | 119.5 | 167.5 | 229 |
| Output shaft diameter D4 | Φ14h7 | Φ20h7 | Φ25h7 | Φ40h7 |
| Body diameter D7 (round flange) | Φ60 | Φ80 | Φ115 | Φ160 |
| Input flange length L2 | 20 | 32 | 38 | 66 |
| Input flange Q3 (square) | □60 | □80 | □130 | □175 |
Installation Guide — EP-ZDWE Right-Angle Input Series
Motor Input Direction — 4 Orientations Available
The EP-ZDWE input flange can be oriented in 4 positions relative to the output shaft axis: motor input left, right, up, or down. Specify the required input direction when ordering — the bevel gear stage orientation is set at manufacture. The sealed lifetime lubrication supports all 4 input directions without lubrication modification.
Step-by-Step Installation Procedure
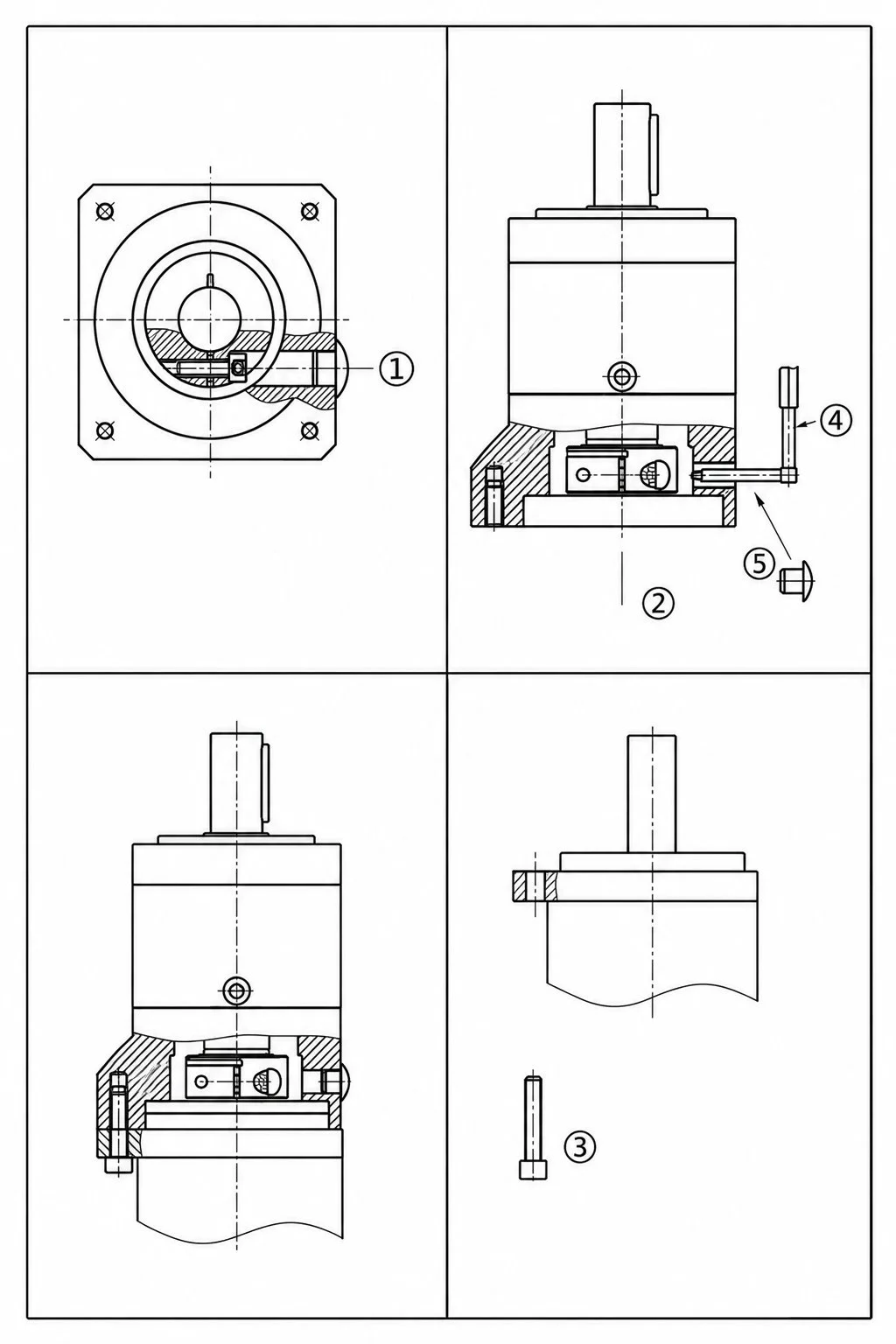
Confirm Input Direction & Model Code
Verify the EP-ZDWE model code includes the input direction specification (left/right/up/down). Confirm frame size (60–160), gear ratio, output flange D7 (Φ60–Φ160 mm), and input flange Q3 matches the servo motor front face. Check that L12 (total perpendicular height) fits within the available machine section height before installation.
Motor Coupling — Perpendicular Clamping Input
Insert the servo motor shaft into the perpendicular input bore on the bevel stage side of the gearbox until the motor face contacts the input flange squarely. The clamping input (S-type) works with or without a motor shaft keyway. Tighten locking screws evenly in a cross pattern. Ensure no axial gap between the motor face and the input flange — a gap indicates the motor shaft length is shorter than the input bore depth; use a spacer ring if required.
Output Flange Mounting to Machine
The EP-ZDWE round output flange (D7) mounts identically to EP-ZDE — align the spigot with the machine bore for a close-running fit, install 4×G2 mounting screws, torque evenly. Mounting surface flatness must be within 0.02 mm. Verify there is adequate clearance for the motor to protrude in the specified input direction without contacting machine structure or cable runs before tightening.
Output Shaft Connection & Cable Routing
Connect the load coupling to the h7 output shaft D4 using the standard procedure (key width B1: see ZDE table for same frame size). Route the servo motor power and encoder cables away from the motor in a direction that does not create cable tension at the motor connector during gantry travel or robot arm movement. The 90° input arrangement typically allows cables to exit parallel to the gantry travel direction — plan the cable chain routing during installation.
Load & Clearance Verification
Confirm applied radial load at output shaft centre (L/2) does not exceed the max radial force — identical to EP-ZDE at the same frame size (e.g. 900 N for 80-frame). Manually rotate the motor shaft through a full output revolution and confirm the motor body clears all machine structure in the perpendicular direction throughout the gantry travel range or robot joint angle range — particularly important for robot wrist joints where the perpendicular motor sweeps an arc during joint rotation.
No-Load Run-In & Bevel Stage Warm-Up
Run at no-load for 30 minutes at ≤50% rated input speed, monitoring for unusual noise from the bevel stage — a light humming during the first 10–15 minutes is normal as the bevel gear contact surfaces burnish to their running-in geometry. Monitor housing temperature at both the output bearing area and the bevel stage housing — confirm neither exceeds ambient + 90°C. Verify system backlash after run-in and record as the baseline value.
⚠ Right-Angle Input Cautions: The motor input direction must be specified at the time of ordering — the bevel gear orientation is set at manufacture and cannot be changed in the field. Do not attempt to rotate the bevel stage housing to change the input direction. Do not apply axial force to the bevel stage input shaft during motor installation — seat the motor face squarely. Maintain cable management to prevent cable tension pulling the motor connector during machine travel.
✔ Zero Maintenance — Bevel Stage Included: The EP-ZDWE factory-sealed lifetime lubrication covers both the bevel input stage and the planetary gear stages in a single sealed housing. No separate bevel gear oil fill, no level check, no scheduled lubrication for the bevel stage. The entire gearbox — input bevel and planetary output — runs on factory-injected lifetime grease for the full 20,000-hour rated life.
Applications — EP-ZDWE Right-Angle Planetary Gearbox in Korean Compact Drive Designs
Compact CNC Machine Tool Headstocks — Rotary Axis Drive
Korean compact 5-axis machining centre builders use EP-ZDWE-80 and EP-ZDWE-120 for A-axis and B-axis rotary table drives in machines where the column depth behind the rotary axis is constrained by the machine column cross-section. A typical Korean 5-axis compact machining centre column has 220–250 mm of available depth behind the A-axis flange face — insufficient for a 1 kW servo motor + EP-ZDE-80 at 264 mm combined. EP-ZDWE-80 reduces the axial depth to 184.5 mm (1-stage), with the motor exiting laterally within the available column width. Korean machining centre OEMs in Changwon and Incheon report EP-ZDWE enabling column cross-section reductions of 80–100 mm across product lines that drive down machine weight and price.
Collaborative Robot Wrist & Elbow Joints
Korean collaborative robot manufacturers designing sub-80 mm outer diameter arms use EP-ZDWE-60 for wrist roll (rotation about the arm axis) drives. An inline motor + planetary gearbox at the wrist joint requires the motor to protrude beyond the wrist end-effector mounting flange — increasing the effective arm length and reducing the robot's reach-to-depth ratio. EP-ZDWE-60 routes the motor perpendicular to the wrist axis, keeping the arm outer diameter governed by the gearbox body (Φ60 mm) rather than the motor outer diameter. For the square-flange right-angle variant for wrist joints using plate-mount structure, see the EP-ZDWF series.
High-Speed Gantry Laser Cutting — Compact Y-Axis Carriage
Korean fibre laser cutting system manufacturers designing narrow-profile Y-axis carriages for systems cutting sheet metal up to 4 m wide use EP-ZDWE-80 for the carriage drive axis. The narrow carriage profile reduces the moving mass and moment of inertia of the Y-axis, enabling higher acceleration rates and shorter cycle times. With the motor exiting sideways from the carriage, the cable management chain can run parallel to the Y-axis travel — a cleaner layout than the axially-protruding motor of an inline configuration where the cable chain must accommodate the motor length as an obstacle.
Narrow-Profile Conveyor & Sorting Systems
Korean e-commerce fulfilment and parcel sorting system integrators use EP-ZDWE-60 for drive rollers on narrow-pitch conveyor sections where the belt-width-to-gearbox-depth ratio is constrained. On a 150 mm wide conveyor section, an inline motor + planetary gearbox protruding 260+ mm from the frame would require a larger housing or cross-beam. EP-ZDWE-60 fits within the conveyor frame depth with the motor exiting downward or sideways between adjacent conveyor modules — a common design in Korean high-density sortation conveyor systems at fulfilment centres in Incheon, Suwon, and Bucheon.
Multi-Axis Semiconductor Wafer Transport — Compact Arm Joints
Korean semiconductor equipment manufacturers designing atmospheric-end multi-axis wafer transport robots for 300 mm wafer handling use EP-ZDWE-60 for elbow and shoulder joints where the robot arm link length is constrained by the equipment front-opening unified pod (FOUP) load-port geometry. The sealed EP-ZDWE-60 passes cleanroom particle contamination evaluation (ISO 14644-1 Class 7) — the factory-sealed grease generates no detectable particles from the bevel stage during normal operation. Note that the higher backlash of EP-ZDWE (≤30 arcmin, 60-frame) versus EP-ZDE (≤8 arcmin) is acceptable for position-controlled wafer transport robots where the servo feedback loop compensates for gearbox backlash through closed-loop position control.
Medical Imaging & Diagnostic Equipment — Compact Axis Drives
Korean medical device manufacturers designing CT scanner gantry rotation drives and surgical robot arm joints use EP-ZDWE-60 and EP-ZDWE-80 for axes where the gantry housing outer profile is constrained by patient clearance requirements and IEC 60601 medical electrical equipment enclosure dimensions. The perpendicular motor arrangement allows the gantry or arm cross-section to be optimised for the minimum volume that meets the structural load requirements, rather than being dictated by the combined motor + gearbox inline length. The lifetime-sealed lubrication meets medical equipment maintenance-interval requirements.
Quality Certifications & Testing Standards
- ✔Right-angle input servo gearbox bevel stage gear contact verified — tooth flank engagement measured per production batch
- ✔Backlash measured per unit at ±3% of rated output torque — measurement certificate with every order
- ✔Full-load torque test at rated output torque for each unit before shipment
- ✔IP54 ingress verification per IEC 60529 — every production batch
- ✔Material certificate and dimensional drawing provided with every delivery

Why Korean Engineers Specify Korea Ever-Power EP-ZDWE
📐
30–50% Axial Depth Reduction — Enables Smaller Machine Designs
For Korean machine builders where the motor + gearbox combined depth is the constraint limiting the machine's column cross-section, arm diameter, or carriage profile, EP-ZDWE directly enables a smaller machine design. A 30–50% axial reduction translates to real machine weight savings, reduced structure cost, and in many cases a more competitive product specification in the Korean OEM market.
🔄
Same Output as EP-ZDE — Output-Side Interface Is a Direct Carryover
Korean engineers migrating a machine design from EP-ZDE to EP-ZDWE only need to update the motor mounting interface — the output shaft D4 diameter, round flange D7, mounting hole pattern, and torque ratings are identical per frame size. The output-side machine drawings, coupling specifications, and output bearing support calculations carry over without change.
🔒
Lifetime Lubrication Covers the Bevel Stage — No Separate Bevel Oil Maintenance
Many right-angle gearboxes use a separate oil reservoir for the bevel stage that requires periodic oil level checks and changes. EP-ZDWE's factory-sealed lifetime grease covers both the bevel input and planetary output stages in a single sealed housing — zero lubrication maintenance for the complete gearbox over 20,000 hours, including the bevel stage. This is particularly valued by Korean robot and conveyor OEMs where field maintenance access is restricted.
🎯
4 Input Directions — Left, Right, Up, Down
EP-ZDWE is available with the motor input in 4 positions relative to the output shaft axis. Korean machine designers can optimise cable routing, centre-of-gravity, and service access for the specific installation geometry — not constrained to a single motor direction as with many competitor right-angle gear reducers. All 4 input directions use the same sealed lubrication system and carry the same torque, backlash, and IP54 specification.
🌡️
−25°C to +90°C — Same Range as Inline Series
The EP-ZDWE temperature range is identical to EP-ZDE — no restriction on the operating range introduced by the bevel stage. Korean cold-chain logistics and frozen-food processing applications can use EP-ZDWE at −25°C without low-temperature lubrication modification, the same as the inline series. High-temperature packaging line installations at +90°C ambient are also within specification.
🇰🇷
Korean Application Engineering — Input Direction & Space Calculation
Korea Ever-Power's Korean application team provides EP-ZDWE frame size selection, input direction recommendation, axial depth calculation (L1 vs inline ZDE), and motor input flange specification — in Korean. For Korean machine tool and robot OEMs evaluating whether EP-ZDWE enables a target machine cross-section, the team provides the installation envelope comparison (ZDWE vs ZDE) at no charge before order placement.

Customer Reviews & Application Feedback
5 ★
88%
4 ★
10%
≤3 ★
2%
EP-ZDWE-120 at 20:1 two-stage for the A-axis rotary table on our compact 5-axis VMC. Previous machine generation used EP-ZDE-120 with the motor in-line — the motor + gearbox combination was 321 mm, forcing a 380 mm column cross-section to provide clearance. With EP-ZDWE-120 the axial depth is 277 mm (2-stage), the motor exits laterally, and we reduced the column section to 300 mm. That 80 mm column width reduction saved 22 kg per machine across a production run of 60 units. Korea Ever-Power confirmed the input direction (motor-right) and input flange for our Mitsubishi HG-SR motor in 1 business day.
EP-ZDWE-60 at 16:1 two-stage for the wrist roll joint of our 6-axis collaborative robot. Target wrist outer diameter was 72 mm — impossible with an inline motor at this torque level. EP-ZDWE-60 (Φ60 mm body) allowed us to achieve a 68 mm wrist outer diameter with the motor exiting upward along the forearm. We initially had concerns about the <35 arcmin 2-stage backlash, but our position control loop compensates the backlash contribution and joint positioning is within spec for our ISO 9283 robot accuracy class. Lifetime lubrication on both the bevel and planetary stages was essential — our robot operates in a food processing environment where maintenance access is restricted and grease contamination is a compliance issue.
EP-ZDWE-80 at 10:1 single-stage for the Y-axis of a narrow-carriage fibre laser cutting system — 3 m × 8 m working area, 120 m/min feed rate. Carriage profile width budget was 160 mm (constrained by the guide rail centres). An inline EP-ZDE-80 with our 400 W Yaskawa motor would have protruded 246 mm axially — requiring a wider carriage and changing the guide rail design. EP-ZDWE-80 has L1 of 184.5 mm with the motor exiting sideways within the 160 mm carriage, and the cable chain runs axially without obstacle. Now 18 months in production at 2 shifts per day — no issues with the bevel stage, noise settled after the first week of operation.
Share your EP-ZDWE application experience. Contact Korea Ever-Power: [email protected]
Related Products in the Korea Ever-Power Range
The EP-ZDWE is the right-angle input, round-flange variant in the Korea Ever-Power precision planetary gearbox EP series. The following series are directly related by geometry or application.
EP-ZDE Series — Inline Input, Round Flange
The coaxial inline version of EP-ZDWE — same round flange output and torque ratings, motor in line with output shaft. Offers <8 arcmin backlash (vs <25–30 arcmin for ZDWE) and 96% single-stage efficiency (vs 94% for ZDWE). Choose EP-ZDE when axial space permits and minimum backlash or maximum efficiency is the priority.
EP-ZDWF Series — Right-Angle Input, Square Flange
Identical to EP-ZDWE in all performance specifications — same right-angle bevel input, same torque ratings, same backlash — but with a square output flange (□60–□175 mm) for plate-mount installation. Choose EP-ZDWF when you need the axial space saving of EP-ZDWE and a flat-plate bolt-down output mounting rather than a bore-mount round flange.
EP-ZDS Series — High Stiffness, Heavy Load
When EP-ZDWE-160 at 800 N·m is not sufficient — EP-ZDS delivers up to 1,800 N·m (190-frame) with inline input, square flange, IP65 protection, torsional stiffness up to 130 N·m/arcmin, and 28,000 N maximum axial force. Note: EP-ZDS is inline only; for heavy loads with right-angle motor input, contact Korea Ever-Power for a custom configuration.
Frequently Asked Questions
Additional information
| Editor | Cxm |
|---|
Related products
-

EP-AD Series Round Circular Flange High-Precision Inline Planetary Gearbox (EP-AD047 to EP-AD255)
-

EP-AB Series Standard Square Flange High-Precision Inline Planetary Gearbox (EP-AB042 to EP-AB220)
-

EP-BPGA Series Energy-Saving Planetary Gearbox — A-Type Flange, Motor-Mounted (EP-BPGA040 to EP-BPGA160)
-
EP-BPG Series Energy-Saving Planetary Gearbox — Standard Industrial Drive (EP-BPG040 to EP-BPG160)
-

BAE Series High-Precision Planetary Gearbox — Large Flange Type (EP-BAE050 to EP-BAE235)
-

Standard Right-Angle Planetary Gearbox for General Industry — WPL Series (WPL40–WPL120)
-

High-Precision Compact Planetary Gearbox for Servo Integration — PLS Series (PLS70–PLS190)
-
Right-Angle Planetary Gearbox for Space-Constrained Drives — WPLE/WPLF Series


























