Прецизионный угловой планетарный редуктор EP-TMR

EP-TMR добавляет к EP-TM Планетарный сердечник, перенаправляющий выходной сигнал на 90°, при этом сохраняя плотность крутящего момента и низкий уровень шума, характерные для винтового планетарного механизма. Четыре направления ввода двигателя — влево, вправо, вверх или вниз — позволяют проложить двигатель в любом месте, где это требуется компоновкой станка. Стоимость: люфт +3 угловые минуты и КПД −2% по сравнению с EP-TM в той же раме.
Серия EP-TMR — угловой планетарный редуктор с косозубыми шестернями | Рамы 042–220 мм, P1/P2, i=3–200, выходной вал 90°
Когда ось станка должна повернуться на 90° между серводвигателем и нагрузкой, традиционный подход заключается в использовании внешнего углового конического редуктора или червячного редуктора, прикрепленного болтами к стандартному редуктору. Оба варианта вводят дополнительные компоненты, дополнительные источники люфта и потери эффективности. EP-TMR Объединяет спиральный конический редуктор с поворотом на 90° и винтовой планетарный редуктор в одном герметичном корпусе. Семь типоразмеров (042–220 мм) обеспечивают выходной крутящий момент от 17 Н·м до 2000 Н·м с передаточными числами от i=3 до i=200 в одно- и двухступенчатых конфигурациях. Направление вращения двигателя — влево, вправо, вверх или вниз — фиксируется при изготовлении, поэтому правильное направление необходимо указать при заказе.
Планетарный редуктор с прямым углом и косозубыми шестернями · Спирально-конический редуктор с изменением направления вращения на 90° · Универсальный адаптер для сервомотора · Наличие на складе в Корее
Серия EP-TMR — Полные технические характеристики
Все значения получены при температуре окружающей среды 20 °C, номинальной нагрузке и смазке консистентной смазкой. Стоимость эффективности конической ступени учитывает разницу в 2–31 ТТ3Т между EP-TMR и EP-TM при эквивалентных номинальных условиях.
| Параметр | Единица | Этап | TMR042 | TMR060 | TMR090 | ТМР115 | TMR142 | ТМР180 | TMR220 |
|---|---|---|---|---|---|---|---|---|---|
| Номинальный выходной крутящий момент T₂ₙ | Н·м | L1 (i=3–20) | 17–22 | 40–60 | 130–160 | 208–330 | 342–650 | 588–1200 | 1140–2000 |
| Н·м | L2 (i=12–200) | 17–22 | 40–60 | 130–160 | 208–330 | 342–650 | 588–1200 | 1140–2000 | |
| Максимальный выходной крутящий момент T₂max | Н·м | Л1/Л2 | 3 × T₂ₙ (3× номинальной мощности) | ||||||
| Номинальная входная скорость nₙ | об/мин | Л1/Л2 | 5,000 | 5,000 | 4,000 | 4,000 | 3,000 | 3,000 | 2,000 |
| Максимальная входная скорость n₁max | об/мин | Л1/Л2 | 10,000 | 10,000 | 8,000 | 8,000 | 6,000 | 6,000 | 4,000 |
| Точный люфт P1 | аркмин | L1 (i=3–20) | ≤ 6 угловых минут | ||||||
| Стандартный люфт P2 | аркмин | Л1 / Л2 | ≤ 8 угловых минут (L1) / ≤ 12 угловых минут (L2) | ||||||
| жёсткость на кручение | Н·м/угловая минута | Л1 | 3 | 7 | 14 | 25 | 50 | 145 | 225 |
| Допустимая радиальная сила Fр_макс ¹ | Н | Л1/Л2 | 780 | 1,530 | 3,300 | 6,400 | 9,400 | 14,500 | 50,000 |
| Допустимая осевая сила Fa_max | Н | Л1/Л2 | 350 | 765 | 1,625 | 3,200 | 4,700 | 7,250 | 25,000 |
| Эффективность передачи η | % | Л1 / Л2 | ≥ 95% (L1) / ≥ 92% (L2) | ||||||
| Вес (приблизительно) | кг | Л1 | 0.9 | 2.1 | 6.4 | 13 | 24.5 | 51 | 83 |
| Шум (n=3000 об/мин, холостой ход) | дБ(А) | Л1/Л2 | ≤61 | ≤63 | ≤65 | ≤68 | ≤70 | ≤72 | ≤74 |
| Срок службы | часы | Л1/Л2 | 20 000 ч (непрерывный режим) · 10 000 ч (соответствует стандарту EP-TMR)* | ||||||
¹ Допустимая радиальная сила прикладывается к центру вала (x = L/2). При приложении нагрузки вне центра используйте коэффициент положения выступа Kb из таблицы коэффициентов позиционной нагрузки. Полную методику см. в руководстве по расчету радиальной нагрузки →. *Расчетный срок службы конической ступени в режиме непрерывной работы.
от −10°C до +90°C
Стандарт IP65
90° к входной оси
Герметичная смазка — на весь срок службы
Любая ориентация
S1 круглый / S2 ключевой
Доступные передаточные числа и основные габариты кузова
| Этап | Доступные коэффициенты | Эффективность | Обратная реакция P1 | Типичное применение |
|---|---|---|---|---|
| L1 Single | 3 · 4 · 5 · 6 · 7 · 8 · 10 · 14 · 20 | ≥95% | ≤6′ | Оси складывания упаковки, подача с ЧПУ, боковой привод конвейера. |
| L2 Двойной | 12 · 15 · 20 · 25 · 30 · 35 · 40 · 50 · 60 · 70 · 80 · 100 · 120 · 140 · 160 · 200 | ≥92% | ≤10′ | Шарнирные соединения роботов, приводы с высоким передаточным отношением, установки в условиях ограниченного пространства. |
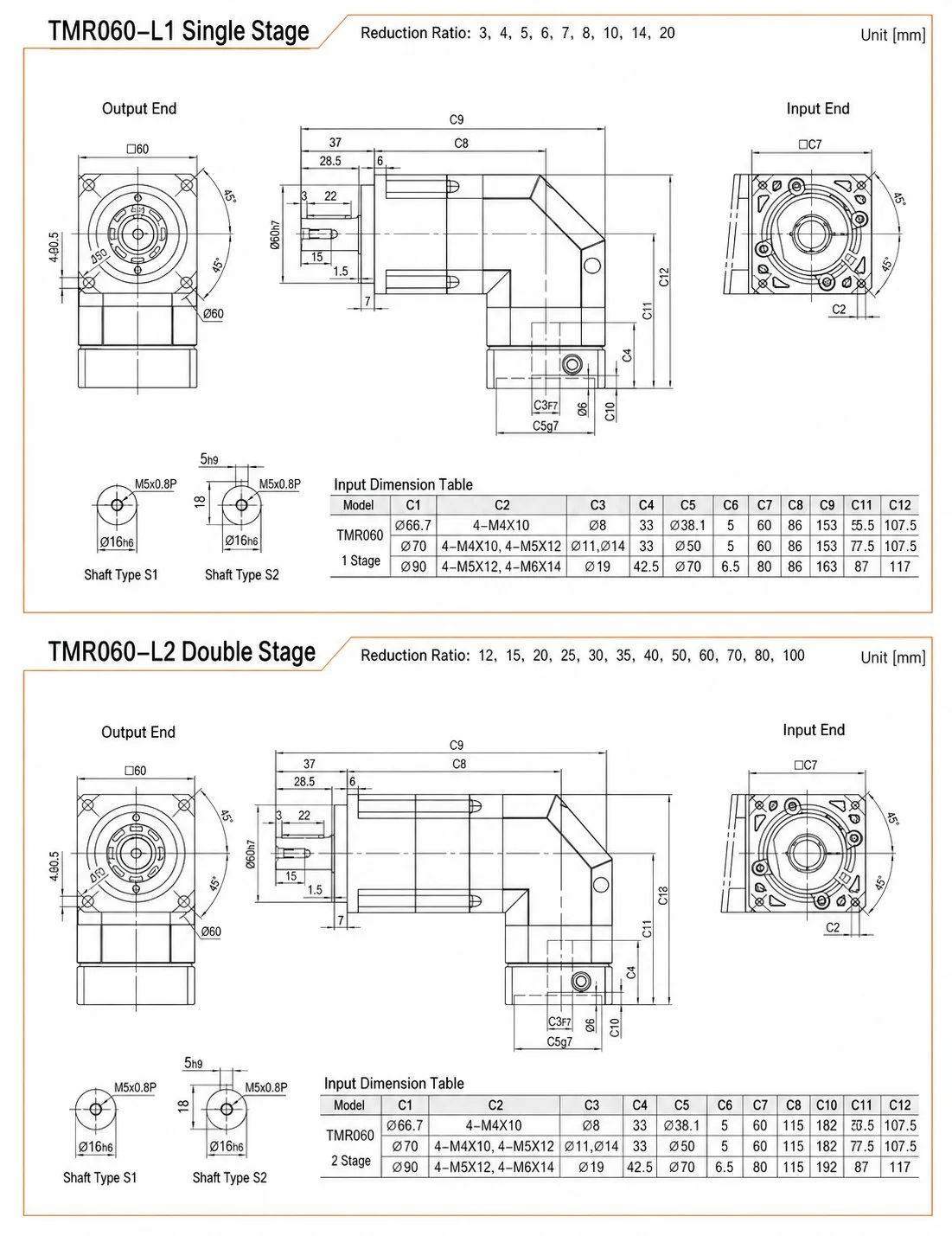
Габариты корпуса ключа EP-TMR — одноступенчатый L1
| Рамка | Выходная грань (кв.) | Выходной вал Ø | Общая длина (L1) | Площадь контакта двигателя (кв.) | Входной пилотный Ø (C1) | Диаметр входного болтового соединения (C2) | Диаметр входного вала (C3) |
|---|---|---|---|---|---|---|---|
| TMR042 | □42 | Ø35h7 / Ø30g7 | 109 мм | □42 | Ø46 | 4-M4×10 | Ø13 |
| TMR060 | □60 | фланец Ø80 | ~153 мм | □60 (C7) | Ø66.7 / Ø70 / Ø90 | 4-М4 / М5 / М6 | Ø8 / Ø11 / Ø19 |
| TMR090 | □90 | фланец Ø116 | ~209 мм | □90 (C7) | Ø90 / Ø100 / Ø115 / Ø145 | M5×12 – M8×20 | Ø19 / Ø16 / Ø19,22 |
| ТМР115 | □115 | фланец Ø152 | ~267,5 мм | □115 (C7) | Ø145 / Ø200 | 4-M8×20 / 4-M12×28 | Ø19,22 / Ø35 |
| TMR142 | □142 | фланец Ø186 | ~338 мм | □142 (C7) | Ø145 / Ø200 | 4-M8×20 / 4-M12×28 | Ø22 / Ø35 |
| ТМР180 | □180 | Ø160h7 / Ø114.3 | ~394 мм | □180 | Обычай | 4-M12×30 | Обычай |
| TMR220 | □220 | Ø180h7 / Ø114.3 | ~484 мм | □180 (C7) | Обычай | 4-M12×30 | Обычай |
Габариты входного отверстия двигателей TMR180 и TMR220 могут быть сконфигурированы заказчиком. Укажите номер модели двигателя при оформлении заказа. Перед окончательным утверждением конструкции машины необходимо сверить все размеры с чертежом Korea Ever-Power.
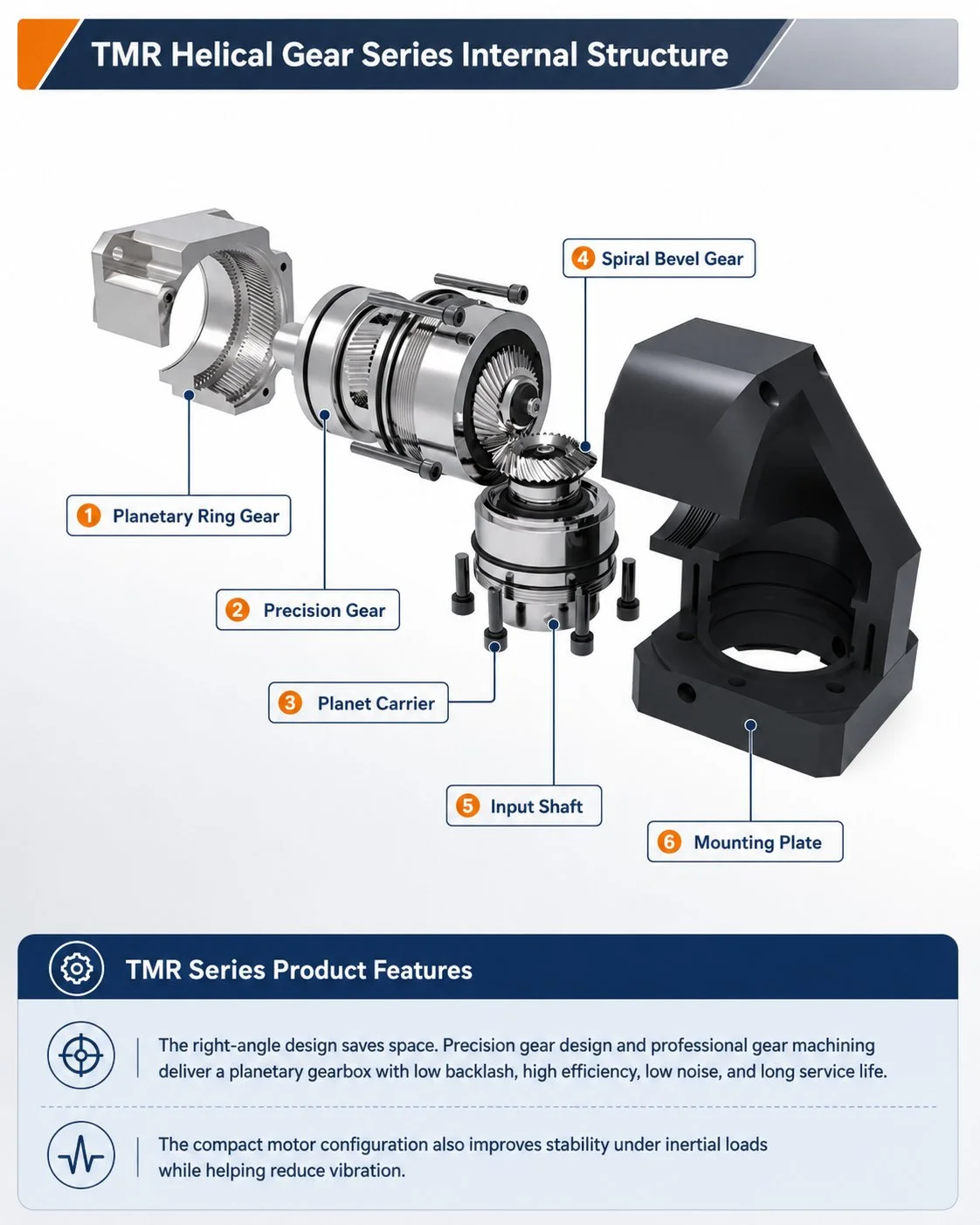
Шесть инженерных преимуществ, которые делают EP-TMR компактным угловым решением.

Добавление углового конического редуктора к стандартному планетарному редуктору приводит к необходимости создания второго корпуса, второй системы подшипников, второй системы смазки и второго источника люфта. EP-TMR объединяет как винтовой планетарный редуктор, так и спиральный конический редуктор с поворотом на 90° в одном кованом корпусе из сплава с одним герметичным отверстием для смазки. Собранный узел короче, легче и имеет меньше изнашиваемых компонентов, чем двухкорпусное решение при том же крутящем моменте.
В конической зубчатой передаче используются шлифованные спиральные конические шестерни — а не прямые конические шестерни — с углом наклона спирали 25–35° и твердостью поверхности 58–62 HRC. Контакт спиральных конических шестерен происходит постепенно по поверхности зуба, а не мгновенно; в результате уровень шума конической зубчатой передачи на 4–6 дБ ниже, чем у прямых конических шестерен при той же нагрузке на зуб. Уровень шума EP-TMR при 3000 об/мин составляет ≤61–74 дБ(А) для разных рам — как правило, на 5 дБ выше, чем у эквивалентной конической зубчатой передачи EP-TM для той же рамы.
Корпус планетарной передачи и вал конической шестерни изготовлены как единый интегрированный компонент — выходной вал планетарной передачи напрямую поступает на коническую шестерню без промежуточной муфты. Отсутствие этой муфты устраняет биение, которое накапливалось бы в соединении корпуса с шестерней в собранной конструкции. Шум и люфт конической шестерни ниже, чем у конкурирующих угловых редукторов, в которых используется отдельная муфта между корпусом планетарной передачи и валом конической шестерни.
Корпус конической направляющей может быть спроектирован с направлением входного вала двигателя влево, вправо, вверх или вниз относительно выходного вала. Это определяется ориентацией корпуса при изготовлении и не может быть изменено в процессе эксплуатации. Такая гибкость исключает необходимость в нестандартных вариантах расположения вала, которые увеличивают длину, погрешность выравнивания и сложность технического обслуживания, когда двигатель должен выходить из рамы станка в определенном направлении. Укажите требуемое направление входного вала — L, R, U или D — в коде модели при оформлении заказа.
Двухступенчатый редуктор EP-TMR обеспечивает передаточное число i=200, в отличие от i=100 у EP-TM. Расширенный диапазон особенно актуален для приводов конвейеров с прямым углом, поворотных кольцевых приводов и низкоскоростных приводов солнечных трекеров, где в одном устройстве требуется сочетание изменения направления на 90° и высокого передаточного числа. При i=200 двигатель со скоростью вращения 3000 об/мин приводит в движение выходной вал со скоростью 15 об/мин — это подходит для тяжелых систем позиционирования поворотных столов и червячных передач на предварительных этапах, где EP-TMR добавляет высокоэффективное первичное понижение перед самоблокирующейся червячной передачей на заключительном этапе.
A conventional inline gearbox plus an external right-angle bevel adapter has a combined axial length equal to both units in series. The EP-TMR's single-housing design is shorter — the 90° turn is inside the gearbox, not outside it. For machine columns, robot joint housings, and conveyor side frames where axial depth behind the output shaft is constrained, EP-TMR reduces the overall drive assembly depth by the length of the external bevel adapter that would otherwise be required. For installations where the motor must also fold sideways to save depth, see the Серия угловых фланцев EP-TNR.
Расчет нагрузок на выходной вал — критическое различие между агрегатами TMR и линейными агрегатами.

The EP-TMR's right-angle output shaft carries a more complex load state than the equivalent inline EP-TM output shaft. This complexity demands careful engineering — and is the reason that EP-TMR permissible radial force specifications are not identical to the EP-TM values at the same frame size.
Внутренняя предварительная нагрузка от стадии снятия фаски: In normal operation, the spiral bevel gear mesh generates a separation force, a tangential force, and an axial force on the bevel shaft. These internal forces are present regardless of any external load applied to the output shaft end. The EP-TMR bearing system is designed with pre-loaded angular contact bearings that neutralise these internal forces — but they consume a portion of the bearing's rated capacity. This is why the permissible external radial force at the EP-TMR output shaft is slightly lower than at the EP-TM output shaft of the same frame.
Коэффициент положения выступа Kб: Когда внешняя радиальная нагрузка приложена в центре вала (x = L/2xL), действует вся допустимая радиальная сила. По мере того, как нагрузка прикладывается дальше от подшипника (x увеличивается сверх L/2xL), изгибающий момент на выходном валу возрастает, а допустимая радиальная сила уменьшается в соответствии с позиционным коэффициентом K.бЗависимость нелинейная — для получения полной таблицы и методики расчета обратитесь к диаграмме коэффициентов нагрузки компании Korea Ever-Power или к руководству по расчету радиальной нагрузки.
Формулы расчета нагрузки на вал — EP-TMR
F₂ᵣ_allowed = F₂ᵣ_perm (полное номинальное значение) Когда F₂ᵣ действует вне центра:
F₂ᵣ_allowed = Kb × F₂ᵣ_perm
(Kb из диаграммы позиционного коэффициента, Kb < 1) Комбинированная радиальная + осевая нагрузка:
F₂ₐ ≤ 0.2 × F₂ᵣ_perm
F₂ₐ_max ≤ 0.1 × F₂ᵣ_perm
EP-TMR (на этой странице): корпус квадратной формы, тот же фланец, что и у EP-TM. Лучше всего подходит для замены линейных агрегатов или в случаях, когда рама машины использует крепление редуктора квадратной формы.
EP-TNRВыход с круглым фланцем. Лучше подходит для применений, требующих выходного фланца большего диаметра, большей несущей способности на выходном интерфейсе или прямого крепления к фланцу робота.
EP-TMR в корейской промышленности — где угловой выход решает реальную конструктивную проблему.

В корейских токарных станках и токарных центрах сервомотор должен располагаться перпендикулярно оси вращения револьверной головки, чтобы не задевать шпиндель. Стандартная конфигурация — EP-TMR060/090 с i=10–25 — двигатель устанавливается сбоку, револьверная головка индексируется по оси выходного вала. Небольшой люфт (P1 ≤6 угловых минут) позволяет подтверждать положение с помощью энкодера без дополнительного оборудования эталонных датчиков.
В корейских фармацевтических блистерных упаковочных машинах и машинах для складывания картонных коробок используется технология EP-TMR, которая приводит в движение фальцевальные рычаги и запаечные плиты с помощью сервопривода, расположенного сзади или сбоку от рамы машины, а не по направлению движения. Выходной вал с углом 90° исключает необходимость в муфте и удлинительном валу, уменьшая накопленную угловую погрешность в механизме складывания и упрощая конструкцию рамы машины.
Корейские автоматизированные транспортные средства (AGV) для электронной коммерции с колесами Mecanum или всенаправленными колесами используют TMR042/060, расположенный в углу колеса и приводимый в движение вертикально установленным двигателем. Компактный корпус TMR042 (общая длина 109 мм, квадратное сечение □42) помещается в ограниченное пространство вокруг колеса, недоступное для стандартного линейного привода. Одноступенчатое передаточное отношение i=5–10 обеспечивает высокую эффективность, подходящую для работы AGV с питанием от батареи.
Front-opening unified pod transfer robots in Korean fab corridors must fit within the SEMI E84 footprint standard. The TMR060/090 allows mounting the servo motor parallel to the robot base plate — reducing the robot's frontal depth by the motor body length compared to an inline configuration. The high-precision P1 version ensures FOUP positioning accuracy within the ±1 mm SEMI standard requirement.
В корейских линиях пищевой промышленности (кимчи, готовые блюда, упакованные закуски) для привода барабанов конвейерной ленты от боковой стенки рамы конвейера используется двигатель TMR090/115. Двигатель устанавливается вертикально на боковой поверхности конвейера, оставляя верхнюю часть конвейера свободной для перемещения продукции, а выходной вал напрямую соединяется с валом барабана. Степень защиты IP65 позволяет использовать конвейер в условиях мойки, характерных для пищевой промышленности.
Korean grain dryers, chemical agitators, and concrete mixer plants use TMR115/142/180 at i=25–100 to drive horizontal screw conveyors from a perpendicular motor. The high-ratio dual-stage (i=100–200) accommodates very slow screw conveyor speeds (5–30 rpm) from standard induction motors. For these high-cycle low-speed applications, the TMR's sealed-grease construction eliminates the oil-bath maintenance that worm reducers require in the same configuration.
Как читать код модели EP-TMR
винтовой планетарный редуктор
042/060/090/115/142/180/220
L1: 3–20 · L2: 12–200
S1 = круглый · S2 = с ключом
P1 ≤6' · P2 ≤8'/≤12'
Укажите модель двигателя при оформлении заказа.
The EP-TMR P1 specification of ≤6 arcmin is slightly wider than the EP-TM P1 specification of ≤3 arcmin. This is not a quality difference — it reflects the addition of the bevel stage's own contribution to total system backlash. At the output shaft, both are measured using the same standard method (see backlash guide →). If your application requires ≤3 arcmin at the output despite the right-angle configuration, specify the EP-TNR или свяжитесь с компанией Korea Ever-Power для получения информации о варианте сверхточной системы TMR.
Часто задаваемые вопросы — Серия EP-TMR
Отзывы клиентов и результаты работы на местах
5 ★
87%
4 ★
11%
≤3 ★
2%
Двигатель EP-TMR090 P1 i=20 установлен на конвейерной головке с боковым приводом, где двигатель должен был выходить из рамы машины сбоку — места в линию не было. Предыдущее решение использовало угловой червячный редуктор в том же положении, который имел КПД 70% и работал при температуре корпуса 65°C летом. КПД EP-TMR090 ≥95% снизил эту температуру до 43°C в установившемся режиме. Также отпала необходимость в ежеквартальной замене масла в червяке. 18 месяцев работы в трехсменном режиме, ни одного случая технического обслуживания. Компания Korea Ever-Power подтвердила наличие адаптера двигателя для нашего Yaskawa SGMGV-09A в тот же день.
EP-TMR115 P1 i=25 для горизонтального фрезерного станка по оси Z, где серводвигатель должен был быть направлен в заднюю часть станка, а не вниз. Выходной сигнал 90° освободил 160 мм вертикального пространства, что позволило увеличить ход по оси Z. Шум от спирального косого среза при 3000 об/мин был вполне приемлемым — ≤68 дБ в соответствии с номинальными параметрами. Четыре варианта направления входного сигнала избавили нас от необходимости изготовления нестандартной конструкции вала. 12 месяцев на производственной линии, люфт не изменился по сравнению с сертификатом поставки.
EP-TMR142 P2 i=40 dual-stage for the base rotation (J1) of a heavy-payload spot welding robot. The 90° output let us mount the motor vertically inside the base column instead of protruding rearward, reducing the robot's floor footprint by 220 mm depth. At 3× rated torque (T₂max = 1,950 N·m) during weld gun clamp the gearbox handled the impulse across 36,000 cycles per year without measurable backlash growth. Received the delivery certificate — actual measured value 7.2 arcmin, well within P2 ≤10 arcmin spec.
Поделитесь своим опытом применения EP-TMR. Свяжитесь с компанией Korea Ever-Power: [email protected]
Укажите характеристики вашего EP-TMR — корейская компания Ever-Power, специализирующаяся на угловых соединениях.
Компания Korea Ever-Power подтверждает типоразмер рамы, передаточное число, степень люфта, нагрузку на выходной вал и тип адаптера двигателя для любого применения EP-TMR, включая проверку радиальной нагрузки для угловых конфигураций с реечным и ременным приводом. Поддержка на корейском языке, ответ в тот же день.
Поддержка по применению угловых редукторов · Ответ в тот же день · Наличие на складе в Корее
Детали
| Редактор | Cxm |
|---|
Сопутствующие товары
-

Прецизионный планетарный редуктор с круглым угловым фланцем серии EP-ADR (EP-ADR047 – EP-ADR255)
-

Прецизионный планетарный редуктор с угловым квадратным фланцем серии EP-ABR (EP-ABR042 – EP-ABR220)
-

Планетарный редуктор с круглым фланцем серии EP-ADS — пять целевых передаточных чисел (EP-ADS047–EP-ADS255)
-

Планетарный редуктор с большим фланцем серии EP-AE
-

Высокоточный прямоточный планетарный редуктор серии EP-AB со стандартным квадратным фланцем (EP-AB042 – EP-AB220)
-

Планетарный редуктор высокой точности серии BAE — с большим фланцем (EP-BAE050–EP-BAE235)
-

Высокоточный планетарный редуктор серии BABR — с круглым фланцем (EP-BABR042–EP-BABR220)
-

Концентрический прецизионный планетарный редуктор для высокоскоростных сервоприводов — серия VR


























