เกียร์ทดรอบแบบแพลเนตารีความแม่นยำสูง รุ่น EP-ZDWF ซีรีส์ อินพุตมุมฉาก หน้าแปลนสี่เหลี่ยม

ชุดเกียร์ดาวเคราะห์ความแม่นยำสูง EP-ZDWF เป็นเกียร์แบบมุมฉากที่มีหน้าแปลนสี่เหลี่ยมจัตุรัส โดยผสมผสานขั้นอินพุตแบบเอียง 90° เข้ากับหน้าแปลนยึดเอาต์พุตแบบสี่เหลี่ยมจัตุรัส มีให้เลือกสี่ขนาดเฟรมตั้งแต่ EP-ZDWF-60 ถึง EP-ZDWF-160 ให้แรงบิดเอาต์พุตที่กำหนดตั้งแต่ 12 N·m ถึง 800 N·m ด้วยประสิทธิภาพขั้นเดียว 94% อินพุตแบบเอียง 90° ทำให้มอเตอร์เซอร์โวตั้งฉากกับเพลาเอาต์พุต ลดความลึกในการติดตั้งตามแนวแกนโดยรวมลง 30–50% เมื่อเทียบกับแบบตรง หน้าแปลนสี่เหลี่ยมจัตุรัส (□60–□175 มม.) ยึดติดกับแผ่นเรียบใดๆ ด้วยสลักเกลียว 4 ตัว — ไม่จำเป็นต้องเจาะรูอย่างแม่นยำ EP-ZDWF เป็นเกียร์แบบมุมฉากที่ใช้งานได้หลากหลายที่สุดในการติดตั้ง ตัวลดเกียร์ดาวเคราะห์ความแม่นยำสูง ในซีรีส์ Ever-Power EP ของเกาหลี ได้รวมเอาการประหยัดทั้งความลึกตามแนวแกนและการเจาะรูไว้ในเครื่องเดียว
เกียร์ทดรอบแบบแพลเนตารีความแม่นยำสูง รุ่น EP-ZDWF แบบหน้าแปลนสี่เหลี่ยมและอินพุตมุมฉาก | 30–50% ประหยัดแรงแกน + ไม่ต้องเจาะรู รับแรงบิดได้สูงสุด 800 N·m
EP-ZDWF คือเกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูงจาก Korea Ever-Power ซึ่งผสานข้อดีในการติดตั้งสองประการเข้าด้วยกัน: การลดความลึกตามแนวแกน 30–50% ของอินพุตการลบมุมฉาก (จาก เกียร์ทดรอบแบบเฟืองดาวเคราะห์มุมฉาก รุ่น EP-ZDWE) และ การติดตั้งแบบแผ่นเรียบ ไม่ต้องเจาะรู ของหน้าแปลนเอาต์พุตสี่เหลี่ยม (จาก ซีรีส์ EP-ZDFสำหรับผู้ผลิตเครื่องจักรชาวเกาหลีที่ทำงานกับโครงสร้างเชื่อม โครงสร้างอลูมิเนียมอัดขึ้นรูป หรือชุดประกอบแผ่นตัดด้วยเลเซอร์ ซึ่งมีข้อจำกัดทั้งในด้านพื้นที่ตามแนวแกนและความสามารถในการกลึงรู EP-ZDWF ช่วยขจัดข้อจำกัดทั้งสองนี้ในผลิตภัณฑ์เดียว
เดอะ ชุดเกียร์ทดรอบแบบดาวเคราะห์ความแม่นยำสูง EP-ZDWF สำหรับหน้าแปลนสี่เหลี่ยมมุมฉาก Ever-Power จากเกาหลี คือการผสมผสานระหว่างซีรีส์ EP-ZDWE และ EP-ZDF เข้าไว้ในหน่วยเดียว โดยใช้ขั้นอินพุตแบบมุมฉาก 90° ของ EP-ZDWE ซึ่งวางตำแหน่งเซอร์โวมอเตอร์ให้ตั้งฉากกับเพลาส่งออกเพื่อลดความลึกตามแนวแกนโดยรวม และแทนที่ตัวเรือนส่งออกทรงกลมของ EP-ZDWE ด้วยหน้าแปลนส่งออกทรงสี่เหลี่ยม (□60–□175 มม.) ของ EP-ZDF ทำให้สามารถติดตั้งแบบยึดด้วยสลักเกลียวบนแผ่นเรียบได้โดยตรงโดยไม่ต้องเจาะรู ขั้นเฟืองภายในทั้งหมด อัตราแรงบิด ข้อมูลจำเพาะของระยะคลายตัว ค่าประสิทธิภาพ และลักษณะการหล่อลื่นตลอดอายุการใช้งานนั้นเหมือนกับ EP-ZDWE ทุกประการ
ผู้ผลิตเครื่องจักร OEM ชาวเกาหลีที่ออกแบบเครื่องจักรโดยใช้โครงตัวถังแบบแผ่นเรียบตัดด้วยเลเซอร์หรือโครงแบบกล่องเชื่อม ซึ่งพบได้ทั่วไปในผู้ผลิต AGV ผู้ผลิตโครงหุ่นยนต์ร่วมปฏิบัติงาน และผู้รวมระบบสายพานลำเลียงขนาดกะทัดรัดในเกาหลี พบว่า EP-ZDWF เป็นข้อกำหนดที่เหมาะสมที่สุดเมื่อข้อกำหนดในการออกแบบจำกัดทั้งความลึกตามแนวแกนด้านหลังแกนขับเคลื่อนและการดำเนินการในโรงงานกลึงที่มีอยู่สำหรับการเจาะรู
ข้อดีของการติดตั้งแบบคู่ — เหตุใด EP-ZDWF จึงผสานรวมการประหยัดทั้งสองอย่างเข้าด้วยกัน

รูเจาะกลมแบบอินไลน์ (EP-ZDE) — ข้อจำกัดสองประการ
ปัญหาที่ 1: ความลึกตามแนวแกนยาว
ปัญหาที่ 2: ต้องการรูเจาะที่มีความแม่นยำสูง
→ ต้องใช้การดำเนินการทางกล
→ มอเตอร์ + เกียร์ ~ความลึก 264 มม.
รูเจาะกลมมุมฉาก (EP-ZDWE) — ข้อจำกัดหนึ่งข้อ
[=ZDWE=]──▶ เอาต์พุตรูทรงกลม
✔ ความลึกตามแนวแกนสั้น (แก้ไขแล้ว)
✘ ยังคงต้องการการเจาะรูที่แม่นยำ
หน้าแปลนฉาก (EP-ZDWF) ★ — ไม่มีข้อจำกัดใดๆ
[=ZDWF=]──▶ □ แผ่นเรียบ, สลักเกลียว 4 ตัว
✔ ความลึกตามแนวแกนสั้น (แก้ไขแล้ว)
✔ ไม่จำเป็นต้องเจาะรู (แก้ไขแล้ว)
→ เจาะรู 4 รู ขันน็อต เสร็จเรียบร้อย
เมื่อเงื่อนไขทั้งสองข้อเป็นไปตามที่กำหนด — EP-ZDWF คือข้อกำหนดที่ถูกต้อง
① เครื่องจักรขนาดกะทัดรัดแบบโครงเชื่อม — ไม่ต้องเจาะรู ไม่ต้องเว้นช่องว่างตามแนวแกน
ผู้ผลิตเครื่องจักรขนาดกะทัดรัดเฉพาะทางของเกาหลีที่ผลิตโครงเครื่องจักรจากเหล็กกล่องโครงสร้างเชื่อมต้องเผชิญกับข้อจำกัดทั้งสองอย่างพร้อมกัน คือ โครงเชื่อมไม่มีรูเจาะที่ผ่านการกลึง และมีพื้นที่ด้านหลังแกนหมุนจำกัดสำหรับมอเตอร์ที่จะยื่นออกมาในแนวเดียวกัน แผ่นเหล็กตัดด้วยเลเซอร์ที่เชื่อมติดกับโครงเครื่องจักรจะให้พื้นผิวการติดตั้งที่เรียบ ซึ่งรองรับหน้าแปลนสี่เหลี่ยมของ EP-ZDWF ที่มีรูเจาะและเกลียว 4 รู การป้อนข้อมูลแบบเอียงมุมฉากทำให้มอเตอร์อยู่ภายในความลึกของโครงเครื่องจักรที่มีอยู่ แทนที่จะยื่นออกมานอกเหนือขอบเขต EP-ZDWF แก้ปัญหาการติดตั้งโครงเชื่อมโดยไม่ต้องทำการกลึงหลังการเชื่อม และไม่ต้องขยายขอบเขตของเครื่องจักรออกไปนอกขอบเขตของโครงเครื่องจักร
② โครงตัวถังแบบแผ่นเรียบสำหรับ AGV และหุ่นยนต์เคลื่อนที่ — โครงสร้างตัดด้วยเลเซอร์ ความลึกน้อยที่สุด
โดยทั่วไป ผู้ผลิต AGV ในเกาหลีมักสร้างโครงโมดูลขับเคลื่อนจากแผ่นอลูมิเนียมหรือเหล็กแผ่นเรียบที่ตัดด้วยเลเซอร์ ประกอบเป็นโครงสร้างแบบกล่อง แกนขับเคลื่อนจะติดตั้งผ่านแผ่น และความสูงของแชสซีที่มีอยู่ (มักอยู่ที่ 100–140 มม. สำหรับ AGV แบบโปรไฟล์ต่ำ) ทำให้ไม่สามารถใช้มอเตอร์แบบอินไลน์ได้ที่ระดับแรงบิดที่ใช้งานได้จริง มอเตอร์ EP-ZDWF-60 หรือ EP-ZDWF-80 ติดตั้งผ่านแผ่นด้านล่างโดยใช้หน้าแปลนสี่เหลี่ยมยึดติดกับหน้าแผ่น – มีรูตัดด้วยเลเซอร์ 4 รูในแผ่นที่ตัดพร้อมกันกับรูปทรงของแผ่น มอเตอร์จะออกมาด้านบนเข้าสู่ภายในแชสซี ความลึกของระบบขับเคลื่อนทั้งหมดคือเกียร์บ็อกซ์ L1 เท่านั้น (150–184.5 มม. สำหรับเฟรม 60–80, 1 สเตจ) ซึ่งพอดีกับความสูงของแชสซีโดยมีพื้นที่ว่างสำหรับความสูงของตัวมอเตอร์ภายในปริมาตรภายในแชสซี
③ เครื่องขึ้นรูปโปรไฟล์อลูมิเนียมแบบอัดรีด — ติดตั้งโดยตรงโดยไม่ต้องใช้ขายึด
ผู้ผลิตระบบอัตโนมัติของเกาหลีที่ใช้ระบบโครงสร้างโปรไฟล์อลูมิเนียมขนาด 80×80 มม. หรือ 120×120 มม. สำหรับเครื่องจักรหยิบและวาง เครื่องจ่าย และเครื่องประกอบ ใช้ EP-ZDWF โดยการติดตั้งหน้าแปลนสี่เหลี่ยมเข้ากับแผ่นปลายโปรไฟล์หรือขายึดโดยตรง โปรไฟล์แบบ T-slot ไม่สามารถเจาะรูได้อย่างแม่นยำ แต่แผ่นเรียบที่ติดอยู่กับโปรไฟล์สามารถรับหน้าแปลนสี่เหลี่ยมแบบยึดด้วยสลักของ EP-ZDWF ได้ การป้อนมุมฉากช่วยให้มอเตอร์ออกตามแนวแกนของโปรไฟล์แทนที่จะตั้งฉากกับโปรไฟล์ ทำให้ขนาดหน้าตัดโดยรวมของเครื่องจักรอยู่ภายในตารางโปรไฟล์โดยไม่จำเป็นต้องใช้การอัดขึ้นรูปขนาดใหญ่พิเศษหรือส่วนยื่นของมอเตอร์
เปรียบเทียบการติดตั้งแบบเต็มรูปแบบสำหรับ EP Series ทั้งสี่รุ่น
| เกณฑ์ | อีพี-ซีดีอี | อีพี-ซีดีเอฟ | อีพี-ซีดีวี | อีพี-ซีดีเอฟเอฟ ★ |
|---|---|---|---|---|
| การวางแนวมอเตอร์ | อินไลน์ | อินไลน์ | มุมฉาก 90° | มุมฉาก 90° |
| หน้าแปลนทางออก | ทรงกลม Φ (แบบยึดรู) | สี่เหลี่ยมจัตุรัส □ (แบบติดตั้งบนแผ่น) | ทรงกลม Φ (แบบยึดรู) | สี่เหลี่ยมจัตุรัส □ (แบบติดตั้งบนแผ่น) |
| การประหยัดความลึกตามแนวแกน | — | — | ✔ 30–50% สั้นกว่า | ✔ 30–50% สั้นกว่า |
| ไม่ต้องเบื่อเลย | — | ✔ ไม่น่าเบื่อ | — | ✔ ไม่น่าเบื่อ |
| ประสิทธิภาพขั้นตอนที่ 1 | 96% | 96% | 94% | 94% |
| แรงบิด / ระยะคลายตัว / IP | เหมือนกันทุกประการในทุกขนาดเฟรม — แรงบิดที่กำหนดเท่ากัน ระยะคลายตัวต่อขั้นเท่ากัน มาตรฐาน IP54 การหล่อลื่นตลอดอายุการใช้งาน อุณหภูมิใช้งาน −25C ถึง +90C | |||
ซีรี่ส์ EP-ZDWF — ข้อมูลจำเพาะทางเทคนิคฉบับสมบูรณ์
① แรงบิดเอาต์พุตที่กำหนด (นิวตันเมตร) — ทุกขนาดเฟรมและอัตราส่วน
| อัตราส่วน | เวที | ZDWF-60 | ZDWF-80 | ZDWF-120 | ZDWF-160 |
|---|---|---|---|---|---|
| 3:1 | 1 | 12 | 40 | 80 | 400 |
| 4:1 | 1 | 16 | 50 | 110 | 450 |
| 5:1 | 1 | 16 | 50 | 110 | 450 |
| 8:1 | 1 | 15 | 45 | 100 | 400 |
| 10:1 | 1 | 12 | 40 | 80 | 305 |
| 9:1 | 2 | 40 | 100 | 210 | — |
| 12:1 | 2 | 40 | 100 | 210 | 700 |
| 16:1 | 2 | 44 | 120 | 260 | 800 |
| 20:1 | 2 | 44 | 120 | 260 | 800 |
| 25:1 | 2 | 40 | 110 | 230 | 700 |
| 32:1 | 2 | 44 | 120 | 260 | 800 |
| 40:1 | 2 | 40 | 110 | 230 | 700 |
| 64:1 | 2 | 40 | 100 | 210 | 700 |
| 60–512:1 | 3 | 40–44 | 100–120 | 210–260 | — |
② ความสามารถในการรับน้ำหนัก ประสิทธิภาพ น้ำหนัก และความเร็ว — เหมือนกับ EP-ZDWE ทุกประการ
| พารามิเตอร์ | หน่วย | ZDWF-60 | ZDWF-80 | ZDWF-120 | ZDWF-160 |
|---|---|---|---|---|---|
| แรงรัศมีสูงสุด | เอ็น | 450 | 900 | 2,100 | 6,000 |
| แรงตามแนวแกนสูงสุด | เอ็น | 225 | 450 | 1,050 | 3,000 |
| ประสิทธิภาพ — 1 ขั้นตอน | % | 94 (ขั้นตอนอินพุตแบบเอียง; เทียบกับ 96% สำหรับ EP-ZDE/ZDF แบบอินไลน์) | |||
| ประสิทธิภาพ — 2 ขั้นตอน | % | 92 | |||
| ประสิทธิภาพ — 3 ขั้นตอน | % | 88 | |||
| น้ำหนัก — ขั้นตอนเดียว | กก. | 1.7 | 4.4 | 12 | 36 |
| น้ำหนัก — 2 ขั้นตอน | กก. | 1.9 | 5 | 14 | 40 |
| น้ำหนัก — 3 ขั้นตอน | กก. | 2.1 | 5.5 | 16 | — |
| ความแข็งแกร่งต่อแรงบิด — 1 ขั้นตอน | นิวตันเมตร/อาร์คมิน | 1.5 | 4.5 | 10 | 38 |
| ความแข็งแกร่งต่อแรงบิด — 2 ขั้นตอน | นิวตันเมตร/อาร์คมิน | 2.5 | 6.5 | 13 | 43 |
| ระดับเสียง (ขณะเดินเบา, 3,000 รอบต่อนาที) | เดซิเบล(เอ) | 65 | 68 | 70 | 70 |
| ความเร็วอินพุตสูงสุด | รอบต่อนาที | 4,500 | |||
| ความเร็วอินพุตที่แนะนำ | รอบต่อนาที | 3,000 | |||
③ ปฏิกิริยาตอบโต้จาก Frame & Stage
| เวที | หน่วย | ZDWF-60 | ZDWF-80 | ZDWF-120 | ZDWF-160 |
|---|---|---|---|---|---|
| ปฏิกิริยาตอบโต้ — ขั้นตอนเดียว | อาร์คมิน | <30 | <25 | <25 | <25 |
| ปฏิกิริยาตอบโต้ — 2 ขั้นตอน | อาร์คมิน | <35 | <30 | <30 | <30 |
| ปฏิกิริยาตอบโต้ — 3 ขั้นตอน | อาร์คมิน | <40 | <35 | <35 | — |
④ ข้อมูลจำเพาะทั่วไป
| พารามิเตอร์ | ข้อกำหนด |
|---|---|
| อุณหภูมิในการทำงาน | −25°C ถึง +90°C |
| ระดับการป้องกัน | IP54 (IEC 60529) — ป้องกันฝุ่นละอองและละอองน้ำจากทุกทิศทาง |
| การหล่อลื่น | ระบบหล่อลื่นตลอดอายุการใช้งาน — บรรจุในบรรจุภัณฑ์ที่ปิดผนึกจากโรงงาน ครอบคลุมทั้งเฟืองเอียงและเฟืองดาวเคราะห์ |
| ทิศทางการติดตั้ง | ไม่ว่าจะเป็นแนวนอน แนวตั้ง กลับหัว หรือมุมเอียงใดๆ ก็ได้ |
| ทิศทางการป้อนมอเตอร์ | 4 ตำแหน่ง — ซ้าย ขวา บน ล่าง (ระบุในคำสั่งซื้อ จะกำหนดตายตัวในขั้นตอนการผลิต) |
| ประเภทการยึดเพลาอินพุต | S: ระบบล็อคในตัว (ค่าเริ่มต้น) · S1: แหวนล็อค · S2: ร่องลิ่ม + ตัวหนีบ · K: ร่องลิ่ม · A: กำหนดเอง |
| ความคลาดเคลื่อนของเพลาส่งกำลัง | h7 — ทุกขนาดเฟรม |
| อายุการใช้งานที่กำหนดไว้ | อายุการใช้งาน 20,000 ชั่วโมงที่โหลดพิกัด (อายุการใช้งานของแบริ่ง L10) |
| แรงบิดหยุดทันที | แรงบิดเอาต์พุต 2 เท่าของพิกัด |
ซีรี่ส์ EP-ZDWF — ขนาดทางกล (หน่วย: มม.)
EP-ZDWF มีขนาดตัวเครื่องและขนาดช่องรับอากาศเหมือนกับ EP-ZDWE ทุกประการ แถวสีส้มแสดงขนาดช่องรับอากาศแบบหน้าแปลนสี่เหลี่ยมเฉพาะของ ZDWF L1 และ L12 มีขนาดเท่ากับ EP-ZDWE สำหรับขนาดเฟรมที่สอดคล้องกัน
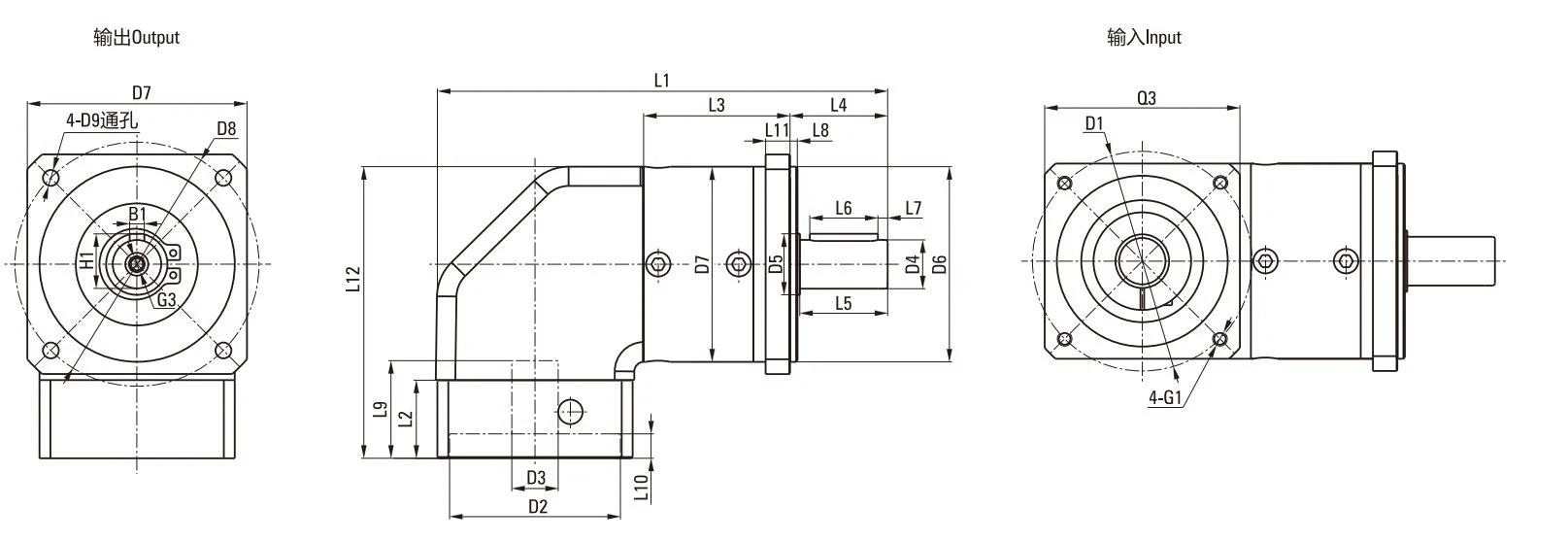
| มิติ | 60ZDWF | 80ZDWF | 120ZDWF | 160ZDWF |
|---|---|---|---|---|
| ขนาดหน้าแปลนสี่เหลี่ยม D7 | □60 | □90 | □120 | □160 / □175 |
| ความหนาของหน้าแปลน L11 | 8 | 10 | 15 | 5 |
| ความยาวโดยรวม L1 — 1 ขั้น | 150 | 184.5 | 249.2 | 368 |
| ความยาวโดยรวม L1 — 2 ขั้นตอน | 163 | 202.5 | 277 | 417.5 |
| ความสูงรวม L12 (รวมหน้าแปลนทางเข้า) | 93 | 119.5 | 167.5 | 229 |
| เส้นผ่านศูนย์กลางเพลาส่งกำลัง D4 | Φ14h7 | Φ20h7 | Φ25h7 | Φ40h7 |
| ความยาวหน้าแปลนขาเข้า L2 | 20 | 32 | 38 | 66 |
| หน้าแปลนทางเข้า Q3 (สี่เหลี่ยม) | □60 | □80 | □130 | □175 |
คู่มือการติดตั้ง — รุ่น EP-ZDWF หน้าแปลนเหลี่ยมมุมฉาก
การติดตั้งแบบผสมผสานระหว่างมุมฉากและหน้าแปลนสี่เหลี่ยม — ติดตั้งได้บนพื้นผิวเรียบทุกชนิด ทุกทิศทาง
การติดตั้ง EP-ZDWF ผสานขั้นตอนของ EP-ZDWF และ EP-ZDF เข้าด้วยกัน: หน้าแปลนสี่เหลี่ยมยึดติดกับพื้นผิวเรียบของเครื่องจักรได้ทุกชนิด (ไม่จำเป็นต้องเจาะรู) และมอเตอร์ติดตั้งตั้งฉากผ่านขั้นตอนการป้อนแบบเอียง ระบุทิศทางการป้อนของมอเตอร์ (ซ้าย/ขวา/ขึ้น/ลง) ในขณะสั่งซื้อ — ซึ่งจะถูกกำหนดในขั้นตอนการผลิต
ขั้นตอนการติดตั้งทีละขั้นตอน
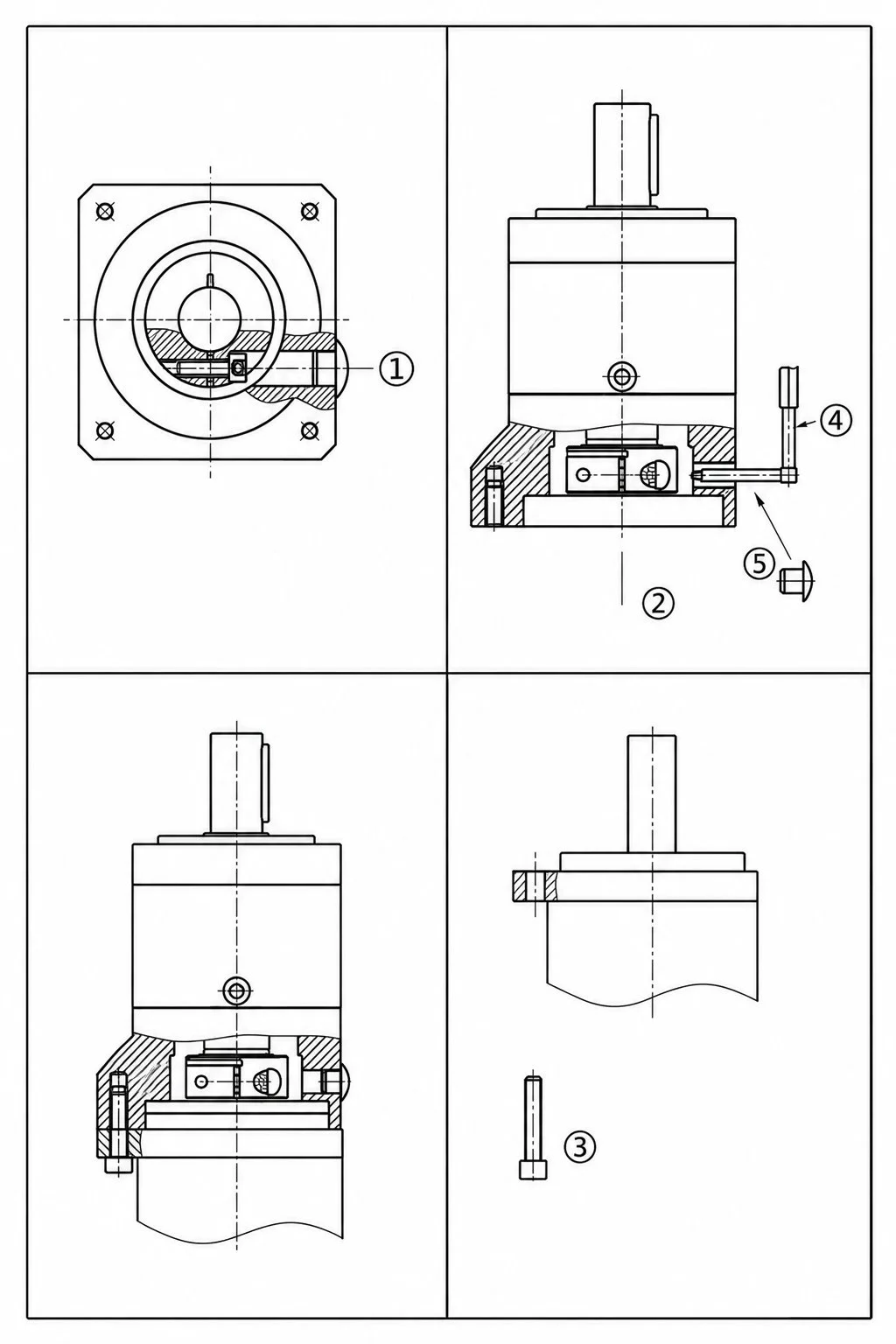
ยืนยันทิศทางการป้อน ขนาดหน้าแปลน และรหัสรุ่น
ตรวจสอบให้แน่ใจว่ารหัสรุ่น EP-ZDWF ประกอบด้วยทิศทางการป้อนมอเตอร์ (ซ้าย/ขวา/ขึ้น/ลง), ขนาดเฟรม (60–160), ขนาดหน้าแปลนสี่เหลี่ยม D7 (□60–□175) และหน้าแปลนป้อน Q3 ที่ตรงกับด้านหน้าของเซอร์โวมอเตอร์ ยืนยันว่า L12 (ความสูงทั้งหมดรวมส่วนป้อนมอเตอร์) พอดีกับส่วนเครื่องจักรของคุณ ตรวจสอบว่าขนาดหน้าแปลนสี่เหลี่ยมและรูปแบบรูสลักเกลียวเข้ากันได้กับแผ่นเครื่องจักรของคุณก่อนการติดตั้ง
เตรียมแผ่นฐานเครื่องจักร — เจาะรูเพียง 4 รู
เจาะรูยึด 4 รูบนแผ่นฐานเครื่องจักรที่ระยะ PCD ที่ถูกต้อง (ดูตารางขนาด EP-ZDF สำหรับขนาดเฟรมที่ตรงกัน — ค่า D8 และ D9) ไม่จำเป็นต้องเจาะรูแบบละเอียด ตรวจสอบให้แน่ใจว่าความเรียบของพื้นผิวการติดตั้งอยู่ในช่วง 0.02 มม. สำหรับแผ่นที่ตัดด้วยเลเซอร์ ให้ตรวจสอบว่าตำแหน่งรูสลักเกลียวรวมอยู่ในไฟล์การตัดในขั้นตอนการออกแบบแผ่นแล้ว — ไม่จำเป็นต้องทำการกลึงเพิ่มเติม ทำความสะอาดพื้นผิวเพื่อขจัดเสี้ยนก่อนการติดตั้ง
ข้อต่อมอเตอร์ — อินพุตมุมเอียงตั้งฉาก
สอดเพลาของมอเตอร์เซอร์โวเข้าไปในรูรับแบบเอียงตั้งฉากจนสุด จนกระทั่งหน้ามอเตอร์สัมผัสกับหน้าแปลนรับอย่างพอดี ขันสกรูล็อครูปตัว S ให้แน่นอย่างสม่ำเสมอในรูปแบบไขว้ ตรวจสอบว่าไม่มีช่องว่างตามแนวแกนระหว่างหน้ามอเตอร์และหน้าแปลนรับ — หากเพลามอเตอร์สั้นกว่าความลึกของรู ให้ใช้แหวนรอง ระบบจับยึดนี้ทำงานได้ทั้งแบบมีและไม่มีร่องลิ่มสำหรับเพลามอเตอร์
การติดตั้งแบบหน้าแปลนสี่เหลี่ยม — รูปแบบรูยึด 4 รู
วางหน้าแปลนสี่เหลี่ยมแนบกับแผ่นฐานเครื่อง โดยจัดแนวรูสลักเกลียวทั้ง 4 รูให้ตรงกับรูปแบบรูบนแผ่นฐาน ใส่สลักเกลียวขนาด 8.8 (แนะนำให้ใช้ขนาด 10.9 สำหรับการใช้งานที่มีรอบการทำงานสูง) ขันให้แน่นด้วยมือ ตรวจสอบให้แน่ใจว่าหน้าสัมผัสแนบสนิท จากนั้นขันให้แน่นอย่างสม่ำเสมอในรูปแบบไขว้ ใช้สารล็อคเกลียว (ความแข็งแรงปานกลาง) สำหรับการใช้งานที่อาจเกิดการสั่นสะเทือน ตรวจสอบให้แน่ใจว่าตัวมอเตอร์มีระยะห่างในทิศทางตั้งฉากก่อนขันให้แน่นสนิท
ตรวจสอบเพลาส่งกำลัง ภาระ และระยะห่าง
เชื่อมต่อชุดต่อโหลดเข้ากับเพลาส่งกำลัง H7 D4 โดยใช้ขั้นตอนมาตรฐาน ตรวจสอบให้แน่ใจว่าแรงโหลดในแนวรัศมีที่จุดศูนย์กลางของเพลา (L/2) ไม่เกินแรงโหลดสูงสุด (เช่น 900 N สำหรับเฟรม 80) หมุนด้วยมือจนครบหนึ่งรอบ และตรวจสอบให้แน่ใจว่าตัวมอเตอร์ไม่ชนกับโครงสร้างเครื่องจักรในทิศทางตั้งฉาก จัดวางสายเคเบิลของเซอร์โวมอเตอร์ให้ขนานกับแกนการเคลื่อนที่ของเครื่องจักร โดยใช้โซ่สายเคเบิลที่มีความยาวเพียงพอที่จะรองรับช่วงการเคลื่อนที่ของแกนใดๆ โดยไม่ทำให้สายเคเบิลตึง
การทดสอบการทำงานโดยไม่มีโหลด การขันน็อตให้แน่นอีกครั้ง และการอุ่นเครื่องก่อนใช้งาน
เดินเครื่องโดยไม่มีโหลดเป็นเวลา 30 นาที ที่ความเร็วอินพุตที่กำหนด ≤50% หลังจากการใช้งานเบื้องต้น: (1) ตรวจสอบค่าแรงบิดของสลักเกลียวหน้าแปลน 4 ตัวอีกครั้ง — การเปลี่ยนแปลงอุณหภูมิอาจทำให้ข้อต่อมีการยุบตัวเล็กน้อย (2) เสียงหึ่งเบาๆ ของแท่นตัดมุมในช่วง 10-15 นาทีแรกถือเป็นพฤติกรรมการใช้งานเบื้องต้นปกติ (3) ตรวจสอบการคลายตัวของระบบผ่านการป้อนกลับของเซอร์โวไดรฟ์ บันทึกเป็นค่าพื้นฐานสำหรับการติดตั้ง การหล่อลื่นแบบปิดผนึกตลอดอายุการใช้งานไม่จำเป็นต้องมีการบำรุงรักษาเพิ่มเติมหลังจากขั้นตอนการใช้งานเบื้องต้นนี้
⚠ ข้อควรระวังในการติดตั้ง: ทิศทางการป้อนมอเตอร์ถูกกำหนดไว้แล้วจากโรงงาน โปรดระบุให้ถูกต้องเมื่อสั่งซื้อ หน้าแปลนสี่เหลี่ยมต้องสัมผัสกับแผ่นเครื่องจักรอย่างเต็มที่ ช่องว่างจะทำให้แรงกดจากสลักเกลียวกระจุกตัวและเสี่ยงต่อการล้าของหน้าแปลน ห้ามออกแรงตามแนวแกนกับเพลาป้อนแบบเอียงในระหว่างการติดตั้งมอเตอร์ ห้ามใช้ความเร็วรอบป้อนเกิน 4,500 รอบต่อนาที ตัวเรือนแบบปิดผนึกไม่มีช่องสำหรับอัดจาระบี ห้ามเติมสารหล่อลื่นจากภายนอก
✔ ไม่ต้องบำรุงรักษา — ครอบคลุมทั้งสองขั้นตอน: ระบบหล่อลื่นตลอดอายุการใช้งานที่ปิดผนึกจากโรงงานครอบคลุมทั้งส่วนป้อนเข้าของเฟืองดอกจอกและส่วนเฟืองดาวเคราะห์ในตัวเรือนเดียวกัน ไม่ต้องใช้น้ำมันเฟืองดอกจอกแยกต่างหาก ไม่ต้องกำหนดเวลาหล่อลื่น และไม่ต้องเติมจาระบีใหม่ตลอดอายุการใช้งาน 20,000 ชั่วโมง ตรวจสอบสลักเกลียวยึดหน้าแปลนทั้ง 4 ตัวอีกครั้งในการตรวจสอบครั้งแรกที่ 5,000 ชั่วโมง พร้อมกับการตรวจสอบซีลกันรั่วด้วยสายตา — นี่เป็นการบำรุงรักษาตามระยะเวลาเพียงอย่างเดียวสำหรับ EP-ZDWF
การใช้งาน — เกียร์ทดรอบแบบแพลนเนอรัล EP-ZDWF มุมฉากและหน้าแปลนสี่เหลี่ยม ในการออกแบบแพลตฟอร์มขนาดกะทัดรัดของเกาหลี
โมดูลขับเคลื่อน AGV แบบทรงต่ำ — โครงตัวถังตัดด้วยเลเซอร์ ความสูงน้อยที่สุด
ผู้ผลิตรถ AGV ในเกาหลีใต้ที่สร้างรถ AMR สำหรับคลังสินค้าที่มีความสูงตัวถัง 100–150 มม. ใช้ EP-ZDWF-60 และ EP-ZDWF-80 สำหรับชุดลดเกียร์เซอร์โวล้อขับเคลื่อน หน้าแปลนสี่เหลี่ยมยึดติดกับแผ่นตัวถังด้านล่างด้วยรูที่ตัดด้วยเลเซอร์ 4 รู — ไม่ต้องเจาะหรือกลึงเพิ่มเติม — และมอเตอร์จะออกมาทางด้านบนเข้าสู่ภายในตัวถังผ่านความสูงตัวถัง 100–150 มม. ความลึกตามแนวแกนของเกียร์ทั้งหมดใต้แผ่นตัวถังคือขนาด L1 เท่านั้น (150–184.5 มม. สำหรับเฟรม 60–80, 1 ขั้น) ซึ่งทำให้ล้อขับเคลื่อนอยู่ในระดับความสูงที่ถูกต้องเมื่อเทียบกับพื้น ผู้ผลิตรถ AGV ในฮวาซอง อินชอน และอันซาน รายงานว่า EP-ZDWF ช่วยให้สามารถออกแบบรถ AMR ที่มีความสูงตัวถังต่ำซึ่งสามารถแข่งขันโดยตรงกับชุดเกียร์ AGV ที่สร้างขึ้นโดยเฉพาะได้ในราคาที่ต่ำกว่ามากเมื่อเทียบกับต้นทุนการผลิตเครื่องมือแบบกำหนดเอง
เครื่องจักรขนาดกะทัดรัดสำหรับงานเฉพาะทาง โครงสร้างเชื่อม
ผู้ผลิตเครื่องจักรเฉพาะทางของเกาหลีที่ผลิตโครงเหล็กกล่องเชื่อมสำหรับอุปกรณ์ประกอบ ทดสอบ หรือขนถ่ายวัสดุโดยเฉพาะ ใช้ EP-ZDWF ในกรณีที่พื้นที่ตามแนวแกนและศักยภาพในการเจาะรูมีจำกัด แผ่นแทรกที่ตัดด้วยเลเซอร์ซึ่งเชื่อมเข้ากับโครงจะให้พื้นผิวการติดตั้งที่เรียบสำหรับหน้าแปลนสี่เหลี่ยมของ EP-ZDWF การป้อนข้อมูลแบบเอียงมุมฉากจะวางตำแหน่งมอเตอร์ภายในความลึกของโครงแทนที่จะยื่นออกไปนอกขอบเขตของโครง ซึ่งเป็นเรื่องปกติโดยเฉพาะในเครื่องประกอบโมดูลแบตเตอรี่รถยนต์ไฟฟ้าของเกาหลี ซึ่งพื้นที่ของเครื่องจักรถูกจำกัดอย่างมากโดยรูปแบบการจัดวางเซลล์การผลิตและการเจาะรูสำหรับชิ้นส่วนประกอบที่เชื่อมนั้นทำได้ยาก
สายการผลิตอัตโนมัติสำหรับโปรไฟล์อลูมิเนียม — ไม่ต้องผ่านกระบวนการตัดแต่งเพิ่มเติม
ผู้ผลิตระบบอัตโนมัติของเกาหลีที่สร้างเซลล์ประกอบและจ่ายวัสดุแบบปรับเปลี่ยนได้จากโครงอลูมิเนียมขนาด 80×80 หรือ 120×120 มม. ระบุให้ใช้ EP-ZDWF สำหรับแกนขับเซอร์โวบนโครงสร้างโปรไฟล์ หน้าแปลนสี่เหลี่ยมจะยึดด้วยสลักเกลียวเข้ากับแผ่นปิดปลายหรือแผ่นเสริมที่ติดอยู่กับโปรไฟล์ — ไม่สามารถเจาะรูในตัวโปรไฟล์ได้ — และมอเตอร์จะออกมาตามแนวแกนของส่วนโปรไฟล์ ทำให้ชุดขับเคลื่อนโดยรวมอยู่ภายในตารางโปรไฟล์โดยไม่ต้องใช้ขายึดขนาดใหญ่เกินไป สำหรับรุ่นหน้าแปลนกลมมุมฉากที่ใช้กับบล็อกโปรไฟล์ที่เจาะรูตามสั่ง โปรดดูที่... เกียร์ทดรอบแบบเฟืองดาวเคราะห์มุมฉาก รุ่น EP-ZDWE.
ข้อมือหุ่นยนต์ร่วมปฏิบัติงาน — โครงสร้างยึดแผ่นฐานแบบหน้าแปลนสี่เหลี่ยม
ผู้ผลิตหุ่นยนต์ร่วมปฏิบัติงานชาวเกาหลีที่ใช้แผ่นคาร์บอนไฟเบอร์หรืออลูมิเนียมตัดด้วยเลเซอร์สำหรับโครงสร้างแขนหุ่นยนต์ (แทนที่จะใช้ข้อต่อแขนแบบหล่อหรือกลึง) ใช้ EP-ZDWF สำหรับข้อต่อหมุนและข้อต่อเอียงของข้อมือ หน้าแปลนสี่เหลี่ยมยึดติดกับแผ่นประกอบโดยไม่ต้องเจาะรูที่มีความแม่นยำสูง ซึ่งทำได้ยากในโครงสร้างคอมโพสิตแผ่นบาง อินพุตมุมฉากจะส่งมอเตอร์ขนานกับข้อต่อแขน ควบคุมเส้นผ่านศูนย์กลางภายนอกของข้อมือให้มีขนาดเท่ากับตัวกล่องเกียร์ (□60–□90 มม.) สำหรับการใช้งานที่โครงสร้างแขนสามารถรองรับรูทรงกลมได้ เกียร์ทดรอบแบบเฟืองดาวเคราะห์ EP-ZDWE รุ่นหน้าแปลนกลม ให้ประสิทธิภาพที่เทียบเท่ากัน
โมดูลโครงยึดเครื่องบรรจุภัณฑ์แบบโปรไฟล์แคบ
ผู้ผลิตเครื่องจักรบรรจุภัณฑ์ของเกาหลีที่ออกแบบสถานีบรรจุและปิดผนึกแบบใช้เซอร์โวมอเตอร์สำหรับสายการบรรจุแบบสายพานลำเลียงหรือแบบโซ่ที่มีระยะห่างแคบ ใช้ EP-ZDWF-60 และ EP-ZDWF-80 สำหรับเซอร์โวมอเตอร์แบบติดตั้งบนขายึด ในกรณีที่พื้นที่ติดตั้งขายึดและความลึกด้านหลังแผ่นยึดมีจำกัด หน้าแปลนสี่เหลี่ยมช่วยให้สามารถเปลี่ยนโมดูลมอเตอร์และเกียร์ทั้งหมดได้ในขั้นตอนการบำรุงรักษาเพียงครั้งเดียว โดยไม่ต้องถอดขายึดออกจากเครื่องหรือทำการปรับแนวรูใดๆ ส่วนทางเข้าแบบเอียงทำมุมฉากจะช่วยนำทางมอเตอร์ไปตามโครงสร้างของเครื่องจักร แทนที่จะยื่นออกมาในบริเวณที่ผู้ปฏิบัติงานเข้าถึงได้
ชุดขับหมุนสำหรับระบบติดตามแสงอาทิตย์ — การติดตั้งแบบแผ่นเรียบ มอเตอร์ด้านข้าง
ผู้ผลิตระบบติดตามแสงอาทิตย์ของเกาหลีที่ออกแบบระบบติดตามแบบแกนเดียวและสองแกน โดยใช้โครงสร้างยึดแบบท่อเหล็กแบนหรือเหล็กฉาก สำหรับฟาร์มพลังงานแสงอาทิตย์ขนาดใหญ่ในเกาหลี เวียดนาม และเอเชียตะวันออกเฉียงใต้ ใช้ EP-ZDWF-120 และ EP-ZDWF-160 สำหรับขับเคลื่อนแกนราบและแกนเงย หน้าแปลนสี่เหลี่ยมยึดติดโดยตรงกับแผ่นยึดแบบแบนที่เชื่อมติดกับชุดท่อแรงบิดของระบบติดตาม – ไม่จำเป็นต้องเจาะรูบนโครงสร้างเหล็กที่ผลิตขึ้นในสถานที่ ทางเข้าแบบเอียงมุมฉากจะนำมอเตอร์เซอร์โวไปตามแนวนอนของท่อแรงบิดแทนที่จะยื่นออกมาตั้งฉากกับพื้นผิวแผงของระบบติดตาม ช่วยลดแรงลมที่กระทำต่อชุดขับเคลื่อนและทำให้มอเตอร์อยู่ในเงาโครงสร้างของระบบติดตาม การซีลระดับ IP54 และช่วงการทำงานตั้งแต่ -25°C ถึง +90°C ครอบคลุมสภาพการใช้งานกลางแจ้งของระบบติดตามในเกาหลีตลอดทั้งปี
การรับรองคุณภาพและมาตรฐานการทดสอบ
- ✔มุมฉาก เกียร์เซอร์โว ตรวจสอบความเรียบของขอบมุมและหน้าแปลนเหลี่ยมในแต่ละชุดการผลิต
- ✔วัดระยะคลายตัวต่อหน่วยที่ ±3% ของแรงบิดเอาต์พุตที่กำหนด — มีใบรับรองการวัดแนบมากับทุกคำสั่งซื้อ
- ✔ทดสอบแรงบิดเต็มพิกัดที่แรงบิดเอาต์พุตที่กำหนดสำหรับแต่ละหน่วยก่อนจัดส่ง
- ✔การตรวจสอบการซึมผ่านของฝุ่นและน้ำระดับ IP54 ตามมาตรฐาน IEC 60529 — ในทุกชุดการผลิต
- ✔ใบรับรองวัสดุและแบบร่างแสดงขนาดจะแนบไปกับการจัดส่งทุกครั้ง

เหตุใดวิศวกรชาวเกาหลีจึงระบุเลือกใช้แบตเตอรี่ Korea Ever-Power EP-ZDWF
🔧
ข้อจำกัดในการติดตั้งทั้งสองข้อได้รับการแก้ไขแล้ว — ข้อกำหนดเดียว
เมื่อการออกแบบเครื่องจักรของเกาหลีถูกจำกัดด้วยความลึกตามแนวแกนที่มีอยู่และการกลึงรูที่ไม่สามารถทำได้พร้อมกัน EP-ZDWF สามารถแก้ไขปัญหาทั้งสองได้ด้วยข้อกำหนดผลิตภัณฑ์เดียว ไม่ต้องออกแบบตัวยึดแยกต่างหากเพื่อเปลี่ยนทิศทางมอเตอร์ ไม่ต้องใช้จิ๊กเจาะรูสำหรับโครงเชื่อม ไม่ต้องแยกชุดเกียร์สองชุดในเครื่องเดียวกัน หนึ่งเดียว เกียร์ดาวเคราะห์ หมายเลขชิ้นส่วน ปัญหาการติดตั้งสองข้อได้รับการแก้ไขแล้ว
🔲
ขอบเหลี่ยมในแผ่นโลหะตัดด้วยเลเซอร์ — ไม่ต้องมีการปรับแต่งเพิ่มเติม
สำหรับผู้ผลิตเครื่องจักรชาวเกาหลีที่ใช้โครงตัวถังแบบแผ่นเรียบตัดด้วยเลเซอร์เป็นโครงสร้างหลัก สามารถตัดรูปแบบรูสลัก EP-ZDWF ลงบนแผ่นโลหะพร้อมกับการขึ้นรูปโปรไฟล์ของแผ่นโลหะได้พร้อมกัน — มี 4 รู ไม่ต้องเจาะเพิ่มเติม ไม่ต้องมีความคลาดเคลื่อนของรูเจาะ การติดตั้งเกียร์ทำได้โดยการเจาะและยึดด้วยสลักบนแผ่นโลหะแผ่นเรียบเดียวกันกับโครงสร้างตัวถังเครื่องจักร
📐
30–50% การลดความลึกตามแนวแกน — ประหยัดได้เท่ากับ EP-ZDWE
การประหยัดพื้นที่ตามแนวแกนของ EP-ZDWF นั้นเหมือนกับ EP-ZDWE ทุกประการ กล่าวคือ ขั้นตอนการป้อนชิ้นงานแบบมุมฉากทำงานเหมือนกันในทั้งสองรุ่น นักออกแบบ AGV และเครื่องจักรขนาดกะทัดรัดชาวเกาหลีที่เลือกใช้ EP-ZDWF แทน EP-ZDWE เนื่องจากโครงสร้างใช้แผ่นเรียบแทนการยึดด้วยรู จะได้รับการลดความลึกตามแนวแกนในขั้นตอนการติดตั้งขั้นสุดท้ายที่เท่ากันอย่างแน่นอน
🔒
ระบบหล่อลื่นตลอดอายุการใช้งาน — เฟืองเฉียง + เฟืองดาวเคราะห์, ตัวเรือนปิดสนิทหนึ่งเดียว
จาระบีที่บรรจุในซองปิดผนึกจากโรงงานครอบคลุมชุดเกียร์ EP-ZDWF ทั้งหมด ทั้งส่วนเฟืองดอกจอกและส่วนเฟืองดาวเคราะห์ ในหน่วยปิดผนึกเดียว ไม่จำเป็นต้องมีอ่างเก็บน้ำมันเฟืองดอกจอกแยกต่างหาก ไม่ต้องบำรุงรักษาระดับน้ำมัน และไม่มีช่องสำหรับเติมสารหล่อลื่น ผู้ผลิตเครื่องจักรชาวเกาหลีที่ติดตั้ง EP-ZDWF ในสถานที่ที่มีข้อจำกัดในการบำรุงรักษา (ภายในแชสซี AGV ภายในส่วนโครงสายพานลำเลียง) จะได้รับประโยชน์จากการออกแบบที่ไม่ต้องบำรุงรักษาตลอดอายุการใช้งาน 20,000 ชั่วโมง
🔄
4 ทิศทางการป้อนข้อมูล — การจัดวางสายเคเบิลที่เหมาะสมที่สุดสำหรับรูปแบบแพลตฟอร์มทุกแบบ
อินพุตมอเตอร์ 4 ตำแหน่ง (ซ้าย/ขวา/ขึ้น/ลง) ของ EP-ZDWF ช่วยให้นักออกแบบแพลตฟอร์มชาวเกาหลีสามารถเดินสายเคเบิลของเซอร์โวมอเตอร์ในทิศทางที่หลีกเลี่ยงสิ่งกีดขวางได้ ไม่ว่าจะเป็นภายในตัวถัง AGV ตามแนวเสาเครื่อง หรือขนานกับโครงสายพานลำเลียง สำหรับการออกแบบที่ต้องปรับเปลี่ยนตัวเลือกการเดินสายมอเตอร์หลายแบบในระหว่างการพัฒนา Korea Ever-Power จะจัดส่งตัวอย่าง EP-ZDWF ในแต่ละทิศทางอินพุตเพื่อประเมินเค้าโครงก่อนที่จะตัดสินใจผลิตเครื่องมือจริง
🇰🇷
ฝ่ายสนับสนุนด้านวิศวกรรมของเกาหลี — การจับคู่หน้าแปลน การตรวจสอบแบบแปลน และทิศทางการป้อนข้อมูล
ทีมงานผู้เชี่ยวชาญด้านการใช้งานของ Korea Ever-Power ในเกาหลี ให้ความช่วยเหลือในการเลือกขนาดเฟรม EP-ZDWF การจับคู่ขนาดหน้าแปลนสี่เหลี่ยมกับขนาดแผ่นเครื่องจักร การเลือกทิศทางการป้อน การคำนวณความลึกตามแนวแกนเทียบกับทางเลือกแบบอินไลน์ และข้อกำหนดหน้าแปลนป้อนมอเตอร์ — เป็นภาษาเกาหลี สำหรับผู้ผลิต AGV และเครื่องจักรเฉพาะทางในเกาหลีที่กำลังประเมิน EP-ZDWF ที่มีข้อดีสองประการ ทีมงานจะทำการคำนวณพื้นที่ติดตั้งทั้งหมดและยืนยันรูปแบบรูบนแผ่นเครื่องจักรโดยไม่คิดค่าใช้จ่ายก่อนการสั่งซื้อ
รีวิวจากลูกค้าและข้อเสนอแนะเกี่ยวกับแอปพลิเคชัน
5 ★
87%
4 ★
11%
≤3 ★
2%
EP-ZDWF-60 อัตราทด 10:1 แบบขั้นตอนเดียว สำหรับ AMR ความสูงตัวถัง 130 มม. ตัวถังของเราทำจากแผ่นอลูมิเนียมหนา 4 มม. ตัดด้วยเลเซอร์ รูยึดสำหรับ EP-ZDWF รวมอยู่ในไฟล์การตัดแล้วโดยไม่มีค่าใช้จ่ายเพิ่มเติม การออกแบบก่อนหน้านี้ใช้เกียร์บ็อกซ์มุมฉากของคู่แข่งที่มีรูเอาต์พุตกลม ซึ่งต้องใช้แผ่นอะแดปเตอร์ที่เจาะรูอย่างแม่นยำ การเพิ่มแผ่นอะแดปเตอร์นั้นทำให้ความสูงของตัวถังเพิ่มขึ้น 18 มม. ทำให้เราเกินเป้าหมาย 130 มม. EP-ZDWF สามารถยึดติดกับแผ่นตัวถังได้โดยตรงโดยไม่ต้องใช้อะแดปเตอร์ ทำให้ความสูงอยู่ที่ 129 มม. เราผลิต AMR มากกว่า 300 ยูนิตต่อปี ในปริมาณนี้ การกำจัดแผ่นอะแดปเตอร์ช่วยประหยัดเวลาในการประกอบ 12 นาที และประหยัดค่าใช้จ่ายด้านฮาร์ดแวร์ประมาณ 850 วอนต่อยูนิต บริษัท Korea Ever-Power ยืนยันว่ารูปแบบรูบนแผ่นตัวถังของเราเข้ากันได้ภายใน 3 ชั่วโมง
เราใช้เกียร์ทดรอบเซอร์โว EP-ZDWF-80 แบบสองขั้นตอน อัตราส่วน 20:1 สำหรับหุ่นยนต์เรียงโมดูลแบตเตอรี่บนโครงเหล็กเชื่อม โครงสร้างทำจากเหล็กกล่องเชื่อมขนาด 100×100 มม. เนื่องจากไม่มีโรงงานกลึงในพื้นที่ เราจึงต้องการเกียร์ทดรอบเซอร์โวสำหรับขับเคลื่อนแกน Z ของหัวเรียงโมดูล เนื่องจากความลึกของเสา (มีให้ใช้งาน 220 มม.) และความสามารถในการกลึงรูนั้นมีจำกัด EP-ZDWF-80 ที่มีทิศทางการป้อนมอเตอร์ไปทางขวาพอดีกับช่องว่างด้านข้างภายในเสาที่ 202.5 มม. (L1 แบบสองขั้นตอน) โดยมอเตอร์จะออกมาในพื้นที่ว่าง เราเชื่อมแผ่นแทรกที่ตัดด้วยเลเซอร์ขนาด 10 มม. เข้ากับโครง เจาะรู 4 รู และยึดเกียร์ทดรอบด้วยน็อต ใช้เวลาติดตั้งทั้งหมด 45 นาทีต่อแกน รวมทั้งการเชื่อมต่อมอเตอร์ ติดตั้งเครื่องจักรไปแล้ว 14 เครื่อง ใช้งานมาแล้ว 18 เดือนโดยไม่มีปัญหาเรื่องเกียร์ทดรอบเลย
มอเตอร์ EP-ZDWF-60 แบบสองขั้นตอน อัตราส่วน 16:1 สำหรับข้อต่อข้อมือของแขนหุ่นยนต์ที่ทำจากแผ่นคาร์บอนไฟเบอร์ โครงสร้างแขนของเราทำจากแผ่น CFRP หนา 3 มม. ที่ขึ้นรูปด้วยเครื่อง CNC — การเจาะรูอย่างแม่นยำทำได้ยากในแผ่น CFRP ที่บาง มอเตอร์ EP-ZDWF ยึดด้วยสลักเกลียวแบบหน้าแปลนสี่เหลี่ยมเข้ากับชิ้นส่วนไทเทเนียมที่เชื่อมติดกับชุดประกอบแผ่น มอเตอร์จะออกมาตามแกนปลายแขนผ่านทางเข้าแบบมุมฉาก ทีมงานฝ่ายแอปพลิเคชันของ Ever-Power จากเกาหลีได้ให้ทิศทางการป้อน (มอเตอร์ขึ้น) และหน้าแปลนป้อนที่ถูกต้องสำหรับมอเตอร์เซอร์โว Delta ของเราภายใน 6 ชั่วโมงหลังจากส่งแบบร่างมอเตอร์ ขนาดภายนอกของข้อต่อข้อมือ: 74 มม. — ซึ่งก่อนหน้านี้เป็นไปไม่ได้ด้วยไดรฟ์แบบอินไลน์ที่ระดับแรงบิดนี้ ปัจจุบันใช้งานมาแล้ว 11 เดือนในหุ่นยนต์เคลือบอาหาร จาระบีปิดผนึกตลอดอายุการใช้งานมีความสำคัญอย่างยิ่งต่อการปฏิบัติตามข้อกำหนดห้องปลอดเชื้อของเรา
แบ่งปันประสบการณ์การใช้งานแอปพลิเคชัน EP-ZDWF ของคุณ ติดต่อ Korea Ever-Power: [email protected]
ผลิตภัณฑ์ที่เกี่ยวข้องในกลุ่มผลิตภัณฑ์ Ever-Power จากประเทศเกาหลี
EP-ZDWF เป็นรุ่นที่มีทางเข้าเป็นมุมฉากและหน้าแปลนสี่เหลี่ยม ในกลุ่มผลิตภัณฑ์ Ever-Power ของเกาหลี เกียร์ทดรอบดาวเคราะห์ความแม่นยำสูง ซีรี่ส์ EP ซีรี่ส์ต่อไปนี้เหมาะสำหรับงานที่ต้องการเพียงข้อดีข้อใดข้อหนึ่งของ EP-ZDWF หรือต้องการแรงบิดที่สูงกว่า
EP-ZDWE — หน้าแปลนกลมมุมฉาก
มีคุณสมบัติการป้อนมุมเอียงฉากและแรงบิด/ระยะคลายตัวเหมือนกับ EP-ZDWF แต่มีหน้าแปลนเอาต์พุตแบบกลม (วงกลม) สำหรับการติดตั้งแบบยึดกับรู เลือก EP-ZDWE เมื่อการประหยัดพื้นที่ตามแนวแกนเป็นสิ่งสำคัญ แต่มีรูเจาะที่แม่นยำให้เลือกใช้ — หน้าแปลนกลมช่วยรองรับแรงโหลดในแนวรัศมีได้ดีกว่าในบางแบบ
EP-ZDF — อินพุตแบบอินไลน์ หน้าแปลนสี่เหลี่ยม
มีเอาต์พุตหน้าแปลนสี่เหลี่ยมและข้อกำหนดแรงบิด/ระยะคลายตัวเหมือนกับ EP-ZDWF แต่มีอินพุตมอเตอร์แบบโคแอกเซียลแบบอินไลน์ เลือกใช้ EP-ZDF เมื่อต้องการติดตั้งโดยไม่ต้องเจาะรูบนแผ่น แต่พื้นที่ตามแนวแกนไม่จำกัด — และจะได้ประสิทธิภาพขั้นเดียว 96% (เทียบกับ 94% สำหรับ EP-ZDWF) พร้อมระยะคลายตัว <8 อาร์คมิน (เทียบกับ <25–30 อาร์คมินสำหรับ EP-ZDWF)
EP-ZDS — ความแข็งแรงสูง รับน้ำหนักได้มาก
เมื่อ EP-ZDWF-160 ที่ 800 N·m ไม่เพียงพอ — EP-ZDS ให้แรงบิดสูงสุดถึง 1,800 N·m (เฟรม 190) ด้วยการป้อนแบบตรงแนว หน้าแปลนสี่เหลี่ยม การป้องกัน IP65 ความแข็งแกร่งในการบิดสูงสุด 130 N·m/arcmin และแรงตามแนวแกนสูงสุด 28,000 N หมายเหตุ: EP-ZDS ใช้ได้เฉพาะการป้อนแบบตรงแนวเท่านั้น สำหรับงานหนักที่ต้องการการป้อนแบบมุมฉาก โปรดติดต่อ Korea Ever-Power เพื่อขอโซลูชันแบบกำหนดเอง
คำถามที่พบบ่อย
ข้อมูลเพิ่มเติม
| บรรณาธิการ | ซีเอ็กซ์เอ็ม |
|---|
ผลิตภัณฑ์ที่เกี่ยวข้อง
-

เกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูง รุ่น EP-ADR (EP-ADR047 ถึง EP-ADR255)
-

เกียร์ทดรอบแบบอินไลน์ชนิดหน้าแปลนกลม รุ่น EP-ADS — อัตราทดเป้าหมายห้าแบบ (EP-ADS047 ถึง EP-ADS255)
-

ชุดเกียร์ทดรอบแบบดาวเคราะห์ประหยัดพลังงาน EP-BPGA Series — แบบหน้าแปลน A ติดตั้งบนมอเตอร์ (EP-BPGA040 ถึง EP-BPGA160)
-
ชุดเกียร์ทดรอบแบบดาวเคราะห์ประหยัดพลังงาน EP-BPG Series — ระบบขับเคลื่อนมาตรฐานสำหรับงานอุตสาหกรรม (EP-BPG040 ถึง EP-BPG160)
-

ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์ความแม่นยำสูง รุ่น BAB — หน้าแปลนมาตรฐาน (EP-BAB042 ถึง EP-BAB220)
-

ชุดเกียร์ทดรอบแบบเฟืองดาวเคราะห์มุมฉากมาตรฐานสำหรับอุตสาหกรรมทั่วไป — ซีรีส์ WPL (WPL40–WPL120)
-

ชุดเกียร์ทดรอบแบบดาวเคราะห์ขนาดกะทัดรัดความแม่นยำสูงสำหรับใช้งานร่วมกับเซอร์โวมอเตอร์ — ซีรีส์ PLS (PLS70–PLS190)
-

เกียร์ทดรอบแบบแพลเนตารีเพลาคู่ EPL สำหรับระบบขับเคลื่อนด้วยโซ่


























